 Dan Royer
Dan Royer
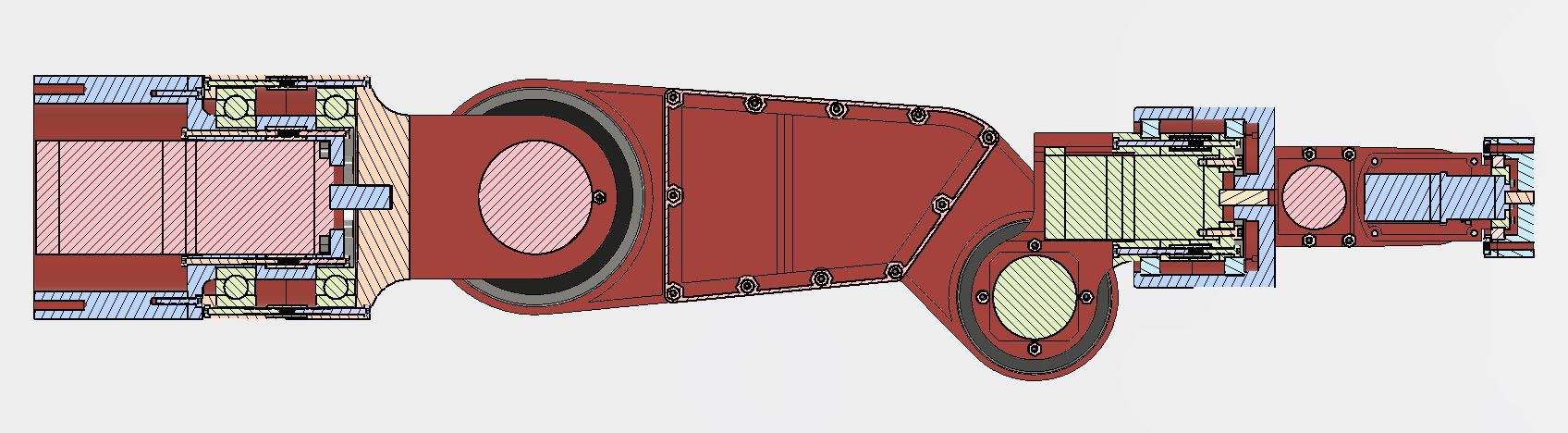
I was up until 4:30am last night working on the fifth attempt to design the arm. Previous post on HAD.io were of (at best) study 4. I reached a point in the design where I'd found enough mistakes that it was easier to restart and use the existing design files as a reference to do a better job. I believe that - after three days of work - I've got something that solves all my previous issues and has fewer prints.
With lessons from the previous attempts, this time I built things in large passes:
place all the things that can't be negotiated (bearings, motors, screws in motor faces)
- build the bones to hold the parts together as rough blocks
- plan where to cut the bones for printing
- add the screw holes, screws, and nuts to each block
- cut the bones into pieces
- calculate bill of materials
- order missing mechanical parts
- adjust each piece for printer tolerance and print. <-- I am here
- the rest of the Gantt chart
Speaking of BOM, here are some stats:
- 218 fasteners
- 34 mechanical parts off the shelf, including the drivers and the controller
- 35 printed parts using ~1.8kg of filament at 20% infill will take 65h of continuous printing.
Cost for raw goods and DIY printed parts is matching my expectations. The long pole is the 8 larger bearings. I got them from VXB.com and they're about $250+shipping. Ugh!
So for day to day updates, follow me on Instagram.
Become one of my Patreon supporters today and you get early access to the Fusion360 files. Build this yourself! Contribute ideas! Automate all the things.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
[this comment has been deleted]
this project is dead. Please look at my sixi 2 robot project instead.
Are you sure? yes | no
happy new year to you, too! some, like https://hackaday.io/project/19968-walter move the motor for any joint J to a position somewhere <J. so the shoulder muscle is in the anchor, the elbow muscle is in the bicep, and so on.
Are you sure? yes | no
Just looking around and saw this alternative "layout". Seems like it would be easier to balance moments. https://i.imgur.com/FJL7Hfg.jpg
Are you sure? yes | no
Easier how? I imagine it's a challenge to keep the two separate bicep pieces aligned.
Are you sure? yes | no
I bow to your extensive experience of trying to build real robots so hadn't anticipated alignment issues. I was partly looking at the two-sided bicep as the forearm could be simply supported, rather than cantilevered. The other aspect was where it offsets at the shoulder and further along. Seems like you could balance some of the mass "behind" the pivot points to counterbalance the mass in front.
Happy new year!
Are you sure? yes | no