 Víctor Mayoral Vilches
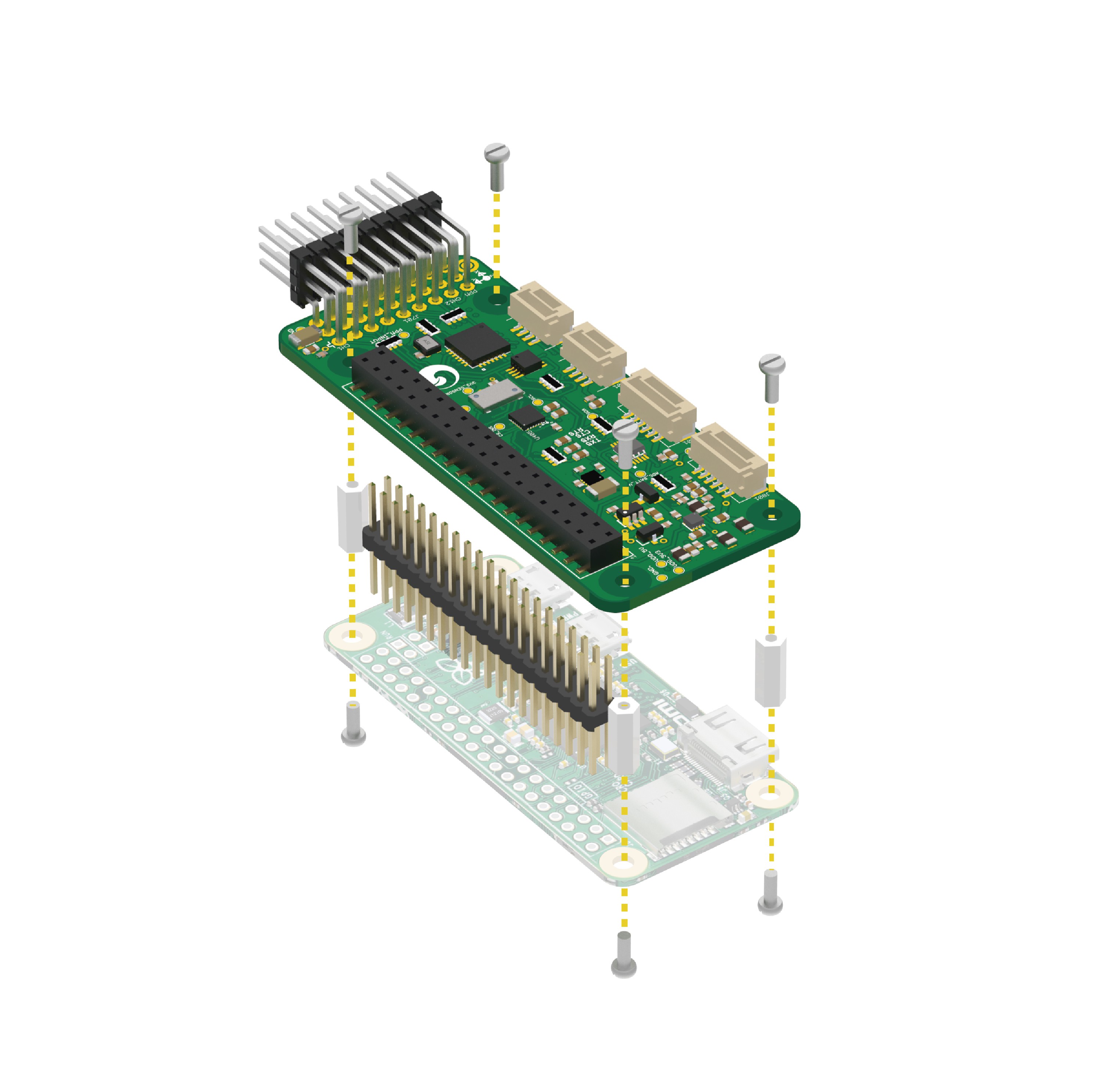
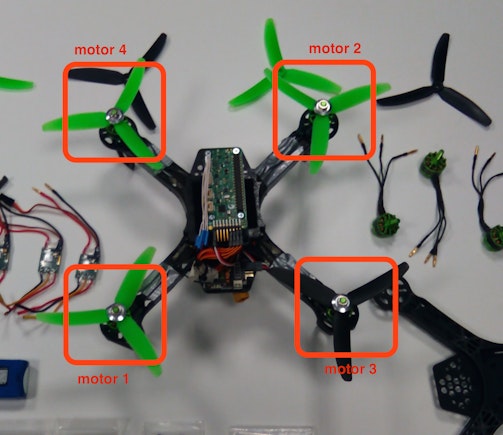
Víctor Mayoral Vilches- Drone made with the PXFmini autopilot shield for the Raspberry Pi (available from here).
- Open schematics
- APM/ardupilot flight stack compiled for the Pi Zero (sources, instructions)
- Linux drone using a Debian file system made by Erle Robotics specially for the Pi Zero (available here). Includes a catkin workspace with the Robot Operating System (ROS) Indigo.
- Docs about the PXFmini
0%
0%
Pi0drone
A $200 smart Linux drone with the Pi Zero and the PXFmini autopilot shield.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Douglas Esteves
Douglas Esteves
 4D Makers
4D Makers
So the links for the website leads to another web, does anyone have the firmware or knows where i can download it ???'