-
PocketBeagle workshop this Friday at Maker Faire New York
09/18/2018 at 18:42 • 0 commentsRegister for PocketBeagle coding workshop this Friday with @Jason Kridner of BeagleBoard.org at Maker Faire New York:
Getting Started with PocketBeagle® from BeagleBoard.org® Hands-On Coding Workshop
https://makerfaire.com/maker/entry/68459/
![]()
-
Bring-A-Hack New York this Friday night
09/17/2018 at 08:42 • 0 commentsThis Friday evening before Maker Faire New York:
![https_cdn.evbuc.comimages48896823300236254471original]()
#BringAHack New York with BeagleBoard.org before Maker Faire
To celebrate our 10 year anniversary and our love of cool hardware hacks, join us for a #BringAHack event in the Big Apple! Join BeagleBoard.org for a casual evening of drinks, snacks and hacks at the Leaf Bar the night before Maker Faire New York.
DATE AND TIME
Fri, Sep 21, 2018, 9:00 PM –
Sat, Sep 22, 2018, 1:00 AM EDT
LOCATION
Leaf Bar & Lounge
133-42 39th Ave, Roof
Queens, NY 11354
-
Embedded Apprentice Linux Engineer (E-ALE)
02/28/2018 at 04:28 • 0 comments![]()
Embedded Apprentice Linux Engineer (E-ALE) is a series of 9 seminars over 3 days at existing Embedded Linux conferences:
Are you an Embedded Engineer who is transitioning to using Linux? Attend seminars on how to start with using Linux for Embedded Applications. The Embedded Apprentice Linux Engineer program provides a place at existing Embedded conferences where you can get your questions answered.
Embedded Apprentice Linux Engineer Hands on Workshops at SCALE 16x in Pasadena from Thursday, March 8th to Saturday, March 10th:
![scale]()
Embedded Apprentice Linux Engineer track at The Linux Foundation’s Embedded Linux Conference in Portland from Monday, March 12 to Wednesday, March 14
![Screenshot from 2018-02-08 14-59-02]()
-
PocketBeagle Wearable Tops off Your Holidays
12/25/2017 at 06:21 • 0 commentsBring some cheer to the holiday season with this PocketBeagle project:
![pb-ledhat2_ZQvgrwhIm3.gif]()
PocketBeagle Wearable Tops off Your Holidays
Use the BeagleBoard.org PocketBeagle with motion sensor to activate LEDs on your DIY “ugly Christmas” wearables. Fun and easy to learn!

BeagleBoard.org PocketBeagle has great performance along with a tiny size and low cost. It makes a perfect platform for building a wearable electronics project. Ugly Christmas Sweaters and other crazy LED projects are fun to share so we decided to try our hand at Holiday Wearables. Since PocketBeagle’s size is even smaller than Raspberry Pi or other similar boards, we were able to fit our project into a Holiday Hat.
Click boards make it easy to add other features – we’ve done motion detection; but you can add other capabilities such as controlling movement, sound or sensors. You can even connect it to your twitter account!

The Python source code is available:
Holiday Motion Detection Demo for PocketBeagle
This code uses a Motion Click board with a PocketBeagle and an LED string to turn on the LED string with a random pattern when motion is detected.
-
Micro SD Extension Cable
10/19/2017 at 17:46 • 3 commentsJeremy S Cook writes on the Tindie blog:
![extension1-wb]()
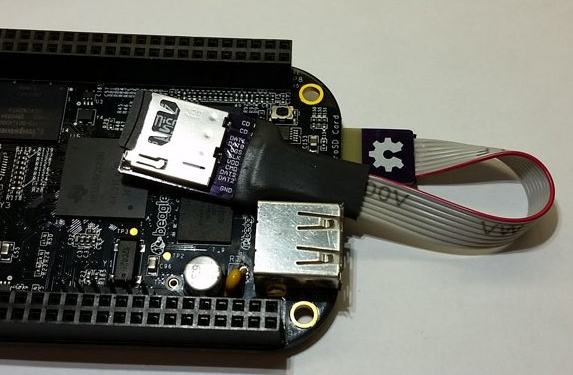
Micro SD Extension Cable
Weirdly, one problem with memory now being so small is that these drives can be placed in areas that are difficult to access. Usually this means some sort of USB adapter (another amazing improvement over serial or parallel ports), but if you just want an actual SD extension cable in the form of a micro SD card, here it is! This device was conceived of when programming a BeagleBone Black, and could have lots of other applications.
![extension2]()
micro SD extension cord designed by Tem Products:
I designed this little tool while compiling a software installation on BeagleBone Black. I needed to repetitively remove/inset the micro SD card. The BeagleBone was installed in a hard-to-reach area. So much time was wasted trying to inset the card with tweezers.
This simple tool plugs into the hard-to-reach socket, and provides a flexible extension.
Length: 3.5″![Screenshot from 2017-10-19 12-47-58.png]()
-
Friday Hack Chat with Jason Kridner
10/12/2017 at 13:29 • 0 commentsThis Friday: Jason Kridner will joining Hackaday’s weekly Hack Chat to talk BeagleBone, PocketBeagle, the BeagleBoard.org community and more!
![beagleboard-hack-chat-featured]()
Friday Hack Chat: The Incredible BeagleBoard
Topics for this Hack Chat will include the direction BeagleBoard is going, the communities involved with BeagleBoard, and how to get the most out of those precious programmable real-time units. As always, we’re taking questions from the community, submit them here.
![join-hack-chat]()
As an extra special bonus, this week we’re giving away some hardware. Digi-Key has offered up a few PocketBeagle boards. If you have an idea for a project, put it on the discussion sheet and we’ll pick the coolest project and send someone a PocketBeagle.
-
GSoC 2017: BeagleWire software support
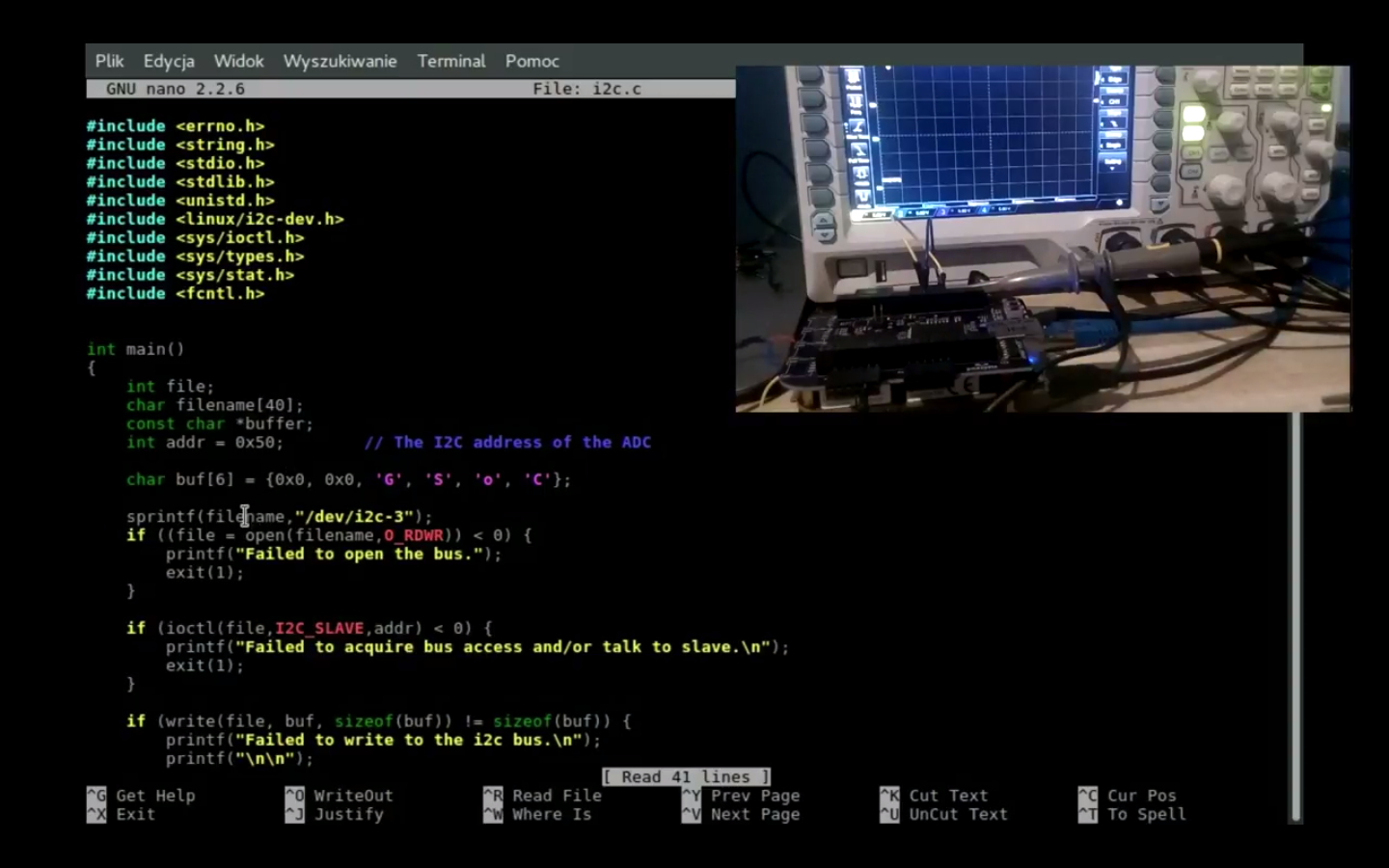
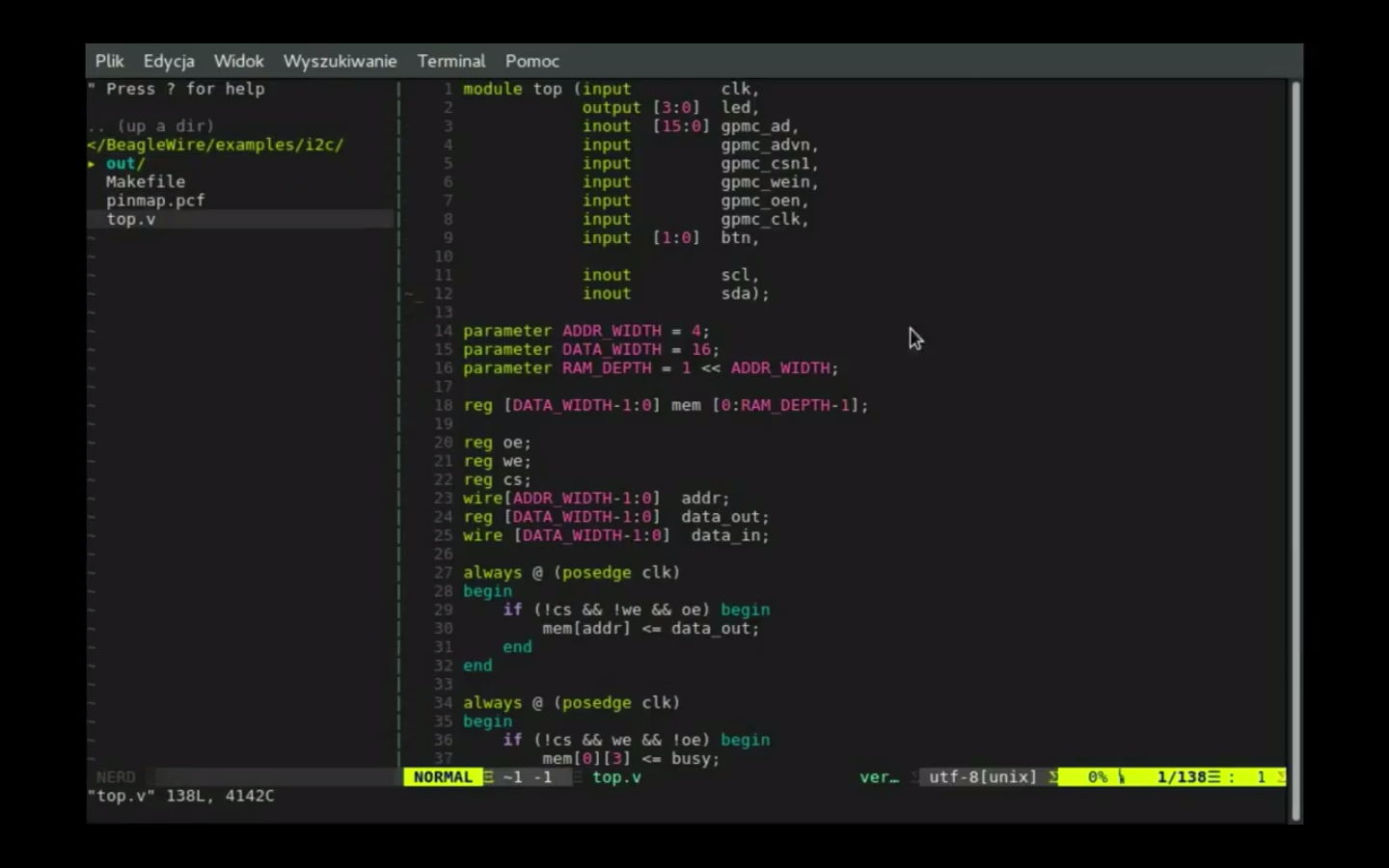
08/29/2017 at 19:16 • 0 comments@Patryk Mężydło has posted the final video for his Google Summer of Code 2017 project
GSoC17 Project: BeagleWire software support – final presentation
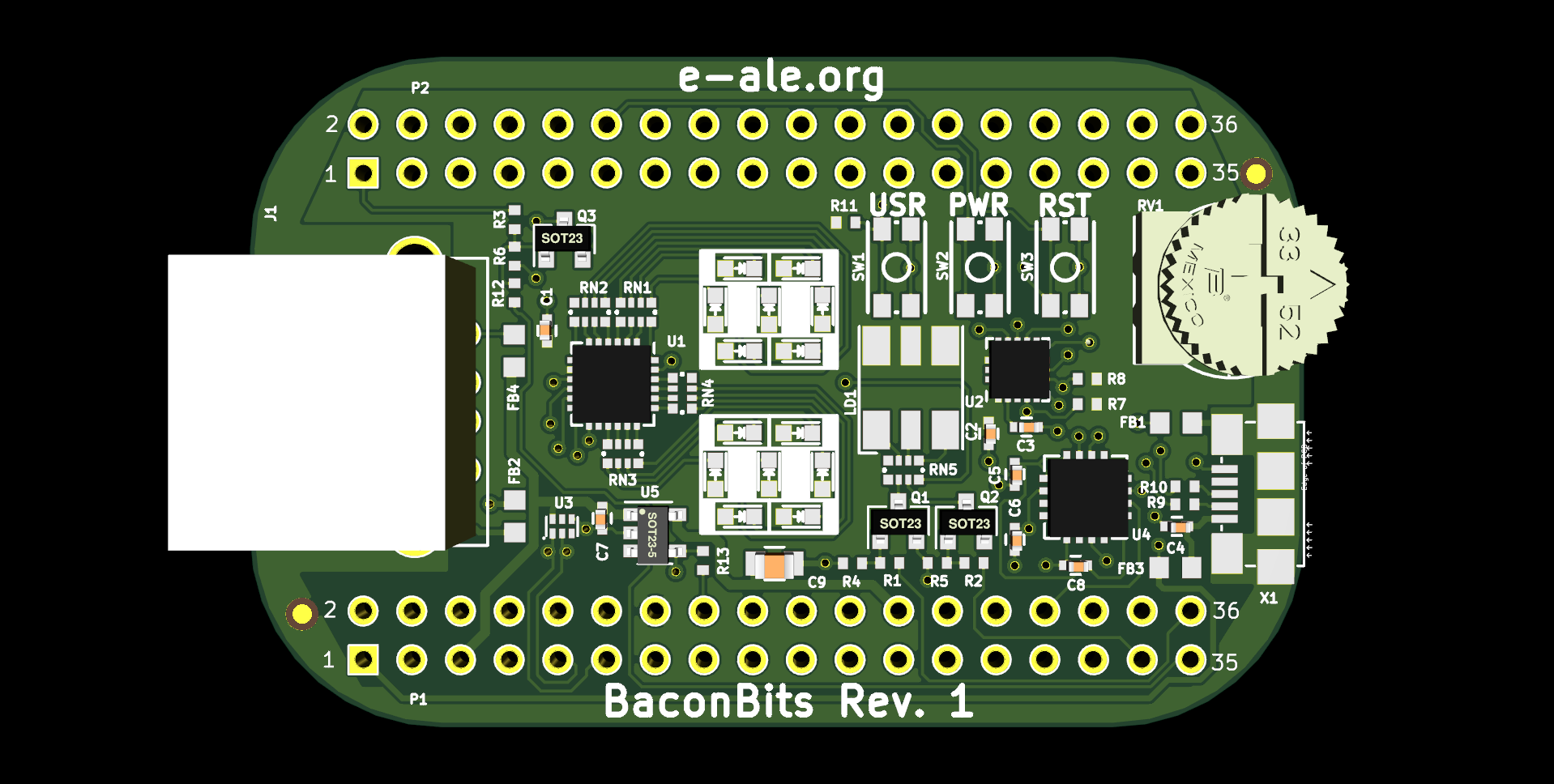
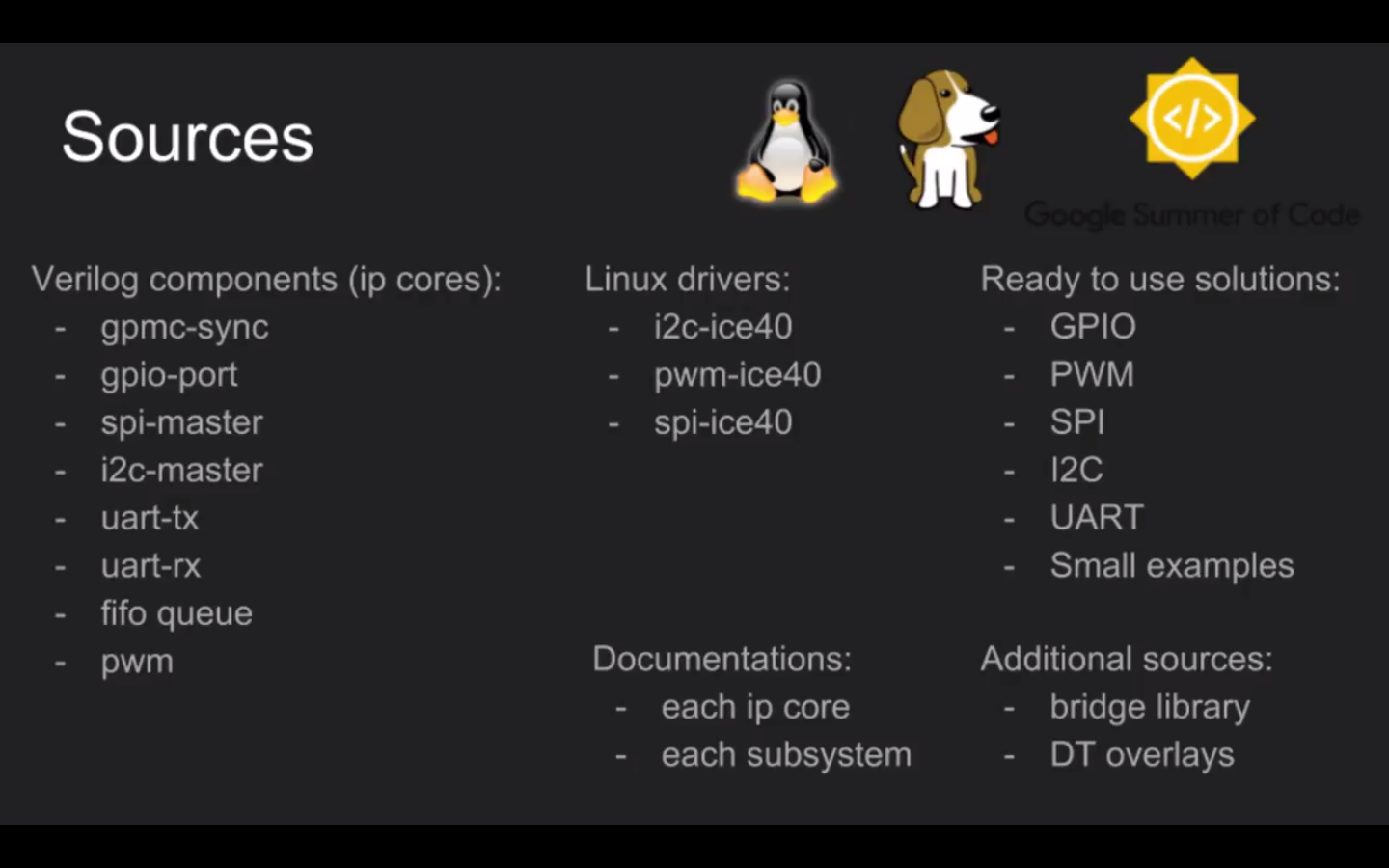
The task is to create software support for FPGA cape (based on iCE40 device). The completed project will provide the BeagleBoard.org community with easy to implement and powerful tools for realization of projects based on Programmable Logic Device(FPGA), which will surely increase the number of applications based on it
![]()
![]()
![]()
(Thanks to mentor @Michael Welling )
-
Hackaday Prize Entry: BeagleLogic Standalone
08/14/2017 at 17:46 • 0 commentsBrian Benchoff wrote on the Hackaday blog about the latest project from Kumar Abhishek:
![]()
Hackaday Prize Entry: BeagleLogic Standalone
A few years ago, [Kumar] created the BeagleLogic, a 14-channel, 100 MSPS logic analyzer for the BeagleBone as an entry for the Hackaday Prize. This is a fantastic tool that takes advantage of the PRUs in the BeagleBone to give anyone with a BeagleBone a very capable logic analyzer for not much cash.
This year, [Kumar] is back at it again. He’s improving the BeagleLogic with a BeagleBone on a chip. This is the BeagleLogic Standalone, a 16-channel logic analyzer at 100 MSPS using a single chip.![]()
Like the BeagleLogic from a few years ago, [Kumar] is relying on those fancy PRUs in the BeagleBone that make reading GPIOs and blinking LEDs so easy and fast. Unlike the BeagleLogic shield/cape/whatever, the BeagleLogic Standalone uses the Octavo Systems’ OSD3358 — the BeagleBone on a chip — for the hardware. This incorporates everything in a BeagleBone into a single package, making for a compact unit that still has all the capabilities of the bigger BeagleLogic.
![sch1]()
Follow the progress on the project page:
BeagleLogic Standalone
BeagleLogic, now as a turnkey and standalone 16-channel Logic Analyzer
![sch2]()
The hardware design files are available on GitHub:
abhishek-kakkar/beaglelogic-standalone
The BeagleLogic software is also available on GitHub:
abhishek-kakkar/BeagleLogic
-
Last chance for FLIR Lepton BeagleBone Blue Challenge
07/20/2017 at 00:26 • 0 comments![]()
Submit project ideas by Friday (July 21st) for FLIR Lepton thermal camera and BeagleBone Blue:
FLIR BeagleBone Blue Challenge
Top 5 ideas will receive hardware!
-
Laser PCBs with LDGraphy
07/02/2017 at 17:40 • 0 commentsInderpreet Singh writes on the Hackaday blog about Henner Zeller’s latest project:

Laser PCBs with LDGraphy
There are many, many ways to get a PCB design onto a board for etching. Even with practice however, the quality of the result varies with the process and equipment used. With QFN parts becoming the norm, the days of etch-resist transfers and a permanent marker are all but gone. Luckily, new and improved methods of Gerber transfer have be devised in recent years thanks to hackers across the world.
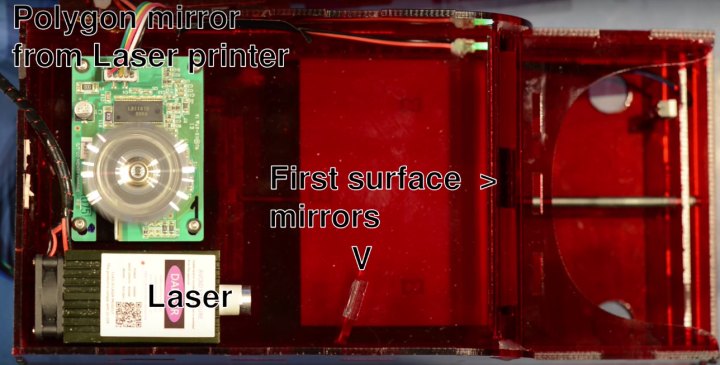
One such hacker, [Henner] is working on a project called LDGraphy in an attempt to bring high-resolution etching to the masses. LDGraphy is a laser lithography device that makes use of a laser and a Beaglebone green to etch the layout onto the board. The best part is that the entire BOM is claimed to cost under a $100 which makes it affordable to people on a budget.

The system is designed around a 500 mW laser and a polygon mirror scanner meant for a laser printer. The board with photoresist is linearly actuated in the X-axis using a stepper motor and the laser beam which is bounced off the rotating hexagonal mirror is responsible for the Y-axis. The time critical code for the Programmable Realtime Unit (PRU) of the AM335X processor is written in assembly for the fast laser switching. The enclosure is, naturally, a laser cut acrylic case and is made at [Henner]’s local hackerspace.
Visit the GitHub repo for more information:
LDgraphy – Laser Direct Lithography
Simple implementation of photo resist exposure using a 405nm laser. Goal is to have this Open Source/Open Hardware system easy to reproduce with commonly available parts.
The BOM is in the order of $100 including the Beaglebone Green:
- 500mW 405nm laser ($30ish)
- Commonly available polygon mirror scanner (from laser printers) ($20ish)
- Beaglebone Black/Green to control it all (using the PRU to generate precise timings for motors and laser) ($40ish)
- Stepper motor for linear axis (plus end-stop switches) (scrap box)
- Photo diode to determine start-of-line (as the polygon mirrors have slightly different long faces and also phase-drift over time) (SFH203P)
- Local electronics: fast Laser diode driver and stepmotor driver (few $$)
-
BeagleBone Blue challenge with FLIR Lepton
06/27/2017 at 19:15 • 0 comments
FLIR has launched a design challenge for the FLIR Lepton 3 thermal camera and BeagleBone Blue. Submit your project idea for the FLIR challenge by July 21st. The top 5 ideas will receive a BeagleBone Blue and FLIR Lepton 3:
FLIR BeagleBone Blue challenge
If you’re into robotics then this challenge is for you! The FLIR Lepton 3 is a radiometric-capable LWIR camera solution that is smaller than a dime, can fit inside a smartphone, and is ten times less expensive than a traditional IR camera. Using focal plane arrays of 160 x 120 active pixels, Lepton 3 easily integrates into native mobile-devices and other electronics as an IR sensor or thermal imager.
The Prizes
- Five finalists will win a Lepton 3 and a BeagleBone Blue board.
- The grand prize package includes a CAT S60 smartphone with integrated thermal imaging from FLIR and an EduMiP robot with BeagleBone® Blue from Beagleboard.org, and promotion of your project by both companies!
How It Works
- Submit your project idea between June 19th and July 21st, 2017
- Top 5 ideas will become the Finalists and receive a Lepton 3 and a BeagleBone Blue board
- Finalist build a prototype and submit their project
- The best of the finalists wins the grand prize package!
The Rules
- Entries must be submitted online by 11:59PM PDT July 21st.
- Enter as many ideas as you like.
- Limited to U.S. residents
- Finalists will be notified by email by July 28th.
- Finalists’ prototypes must be completed and project submission received by August 31st.
- Winner & runners up to be announced September 8th.
-
Music-Loving BeagleBone Blue
06/16/2017 at 17:34 • 0 comments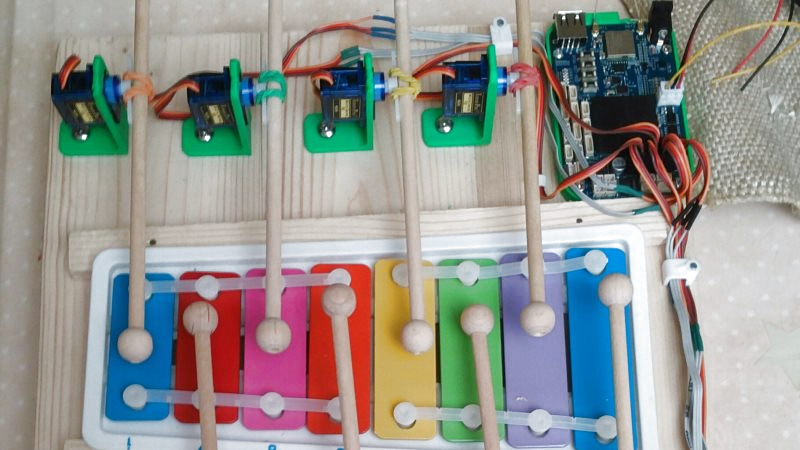
From @Inderpreet Singh on the Hackaday blog:
Music-Loving BeagleBone
Robotic control can get very complicated when multiple actuators need to work in coordination with each other. A simple robotic arm will require each joint to be controlled in sequence to attain a particular position. The BeagleBone Blue comes armed with motor drivers, sensor inputs, and wireless and is built for robotics.
[Andy] has prepared a musical robot called the BeagleBone Blue Electro-Mechanical Glockenspiel using the single board computer. The hardware consists of eight servo motors each with a mallet stick attached to them. The motors themselves are mounted on 3D-printed brackets allowing them to be mounted at the correct height. The servos connect to the main board for position control, however, an external supply had to be used to supply the necessary current to all the motors.
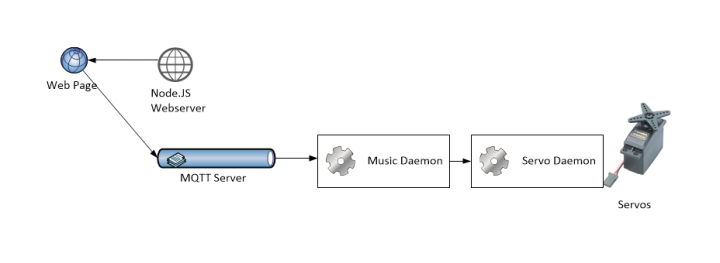
The software side has programs to translate notes into servo positions as well as connect to a web brower via MQTT and websockets. The basic user interface is simple and has buttons to connect to and send the keystrokes.
The source code and OpenSCAD designs are available on GitHub:
Workshopshed/musicController
A music controller to control servos from a web page
Check out @Andy from Workshopshed's blog for more information on the project:
BeagleBone Blue Music Player
I wanted to do a mini project with the BeagleBone Blue that would utilise all of its servo capabilities. So I came up with the idea of a mechanical glockenspiel.
-
BeagleMAV 3D-printed Hexacopter
04/04/2017 at 22:00 • 0 comments
From the DroneLab at the University of California in San Diego:
BeagleMAV
BeagleMAV is a 3D-printed hexacopter that derives its extremely low weight of 500 grams (1.1 pounds) from its unique monocoque structure that was designed iteratively with modal finite element analysis. The monocoque frame design emphasizes simplicity of assembly and safety of indoor flight.

With the BeagleBone Black and Robotics cape at its heart structurally and electrically, the drone’s flight controller is based on the same software environment used for most DroneLab robotics projects (to maintain interoperability). Since the control system is based on a Linux operating system, it becomes possible to connect the BeagleMAV with a wide range of sensors and network interfaces — with minimal modification.

Additional information has been shared on GitHub:
StrawsonDesign/BeagleMAV
-
True Color 3D Printing with BeagleBone and MachineKit
03/29/2017 at 19:07 • 0 commentsWe were very excited to see that the full color Arcus 3D printer by @Daren Schwenke at Midwest RepRap Fest is powered by MachineKit on a BeagleBone Black. Brian Benchoff of Hackaday wrote article about Arcus3D:

MRRF 17: True Color 3D Printing
3D printing has evolved to a point where dual extrusion isn’t really that special anymore. A few yearsago, a two-color frog print would have been impressive, but this isn’t the case anymore. The Midwest RepRap Festival is all about the bleeding edge of what 3D printers are capable of, and this year…

Here is a video of the Arcus3D M2 printing full color rainbow vase:
-
Spring 2017 Newsletter
03/23/2017 at 18:32 • 0 commentsBeagleBoard.org Foundation newsletter for Spring 2017
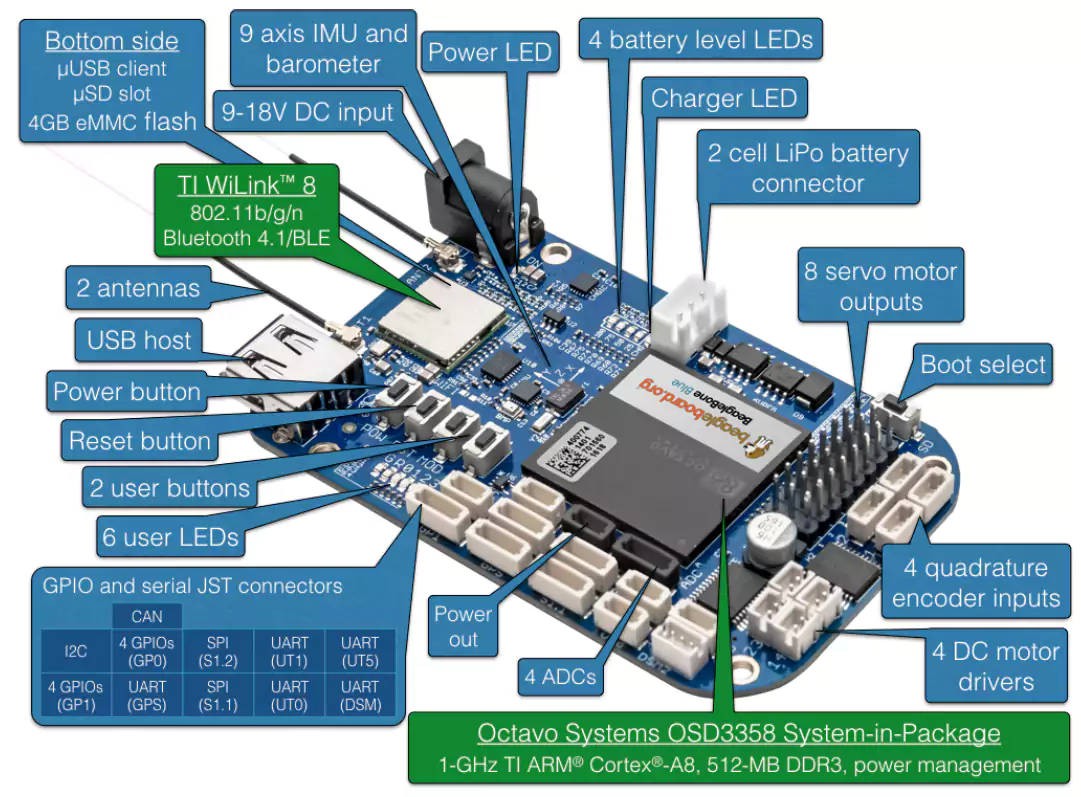
BeagleBone Blue. Robots. Fast. We were excited to launch a new BeagleBone last week at Embedded World: BeagleBone Blue is a complete, Linux-enabled robotics computer. Community-supported and fully open-source, the real-time performance, flexible networking and rich set of robotics-oriented peripherals make building mobile robots quick and affordable.
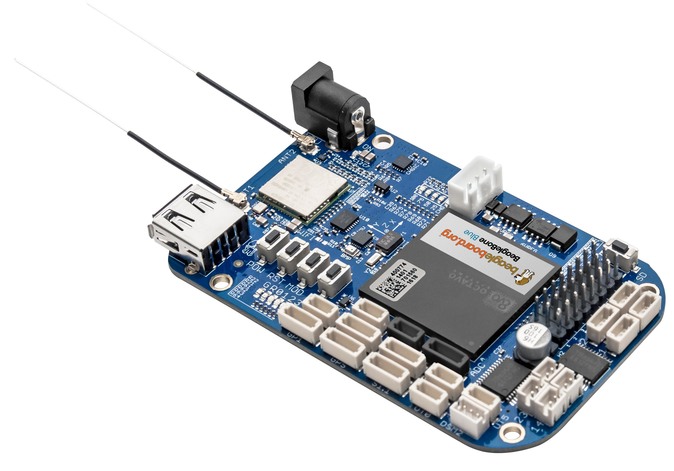
Learn more about the BeagleBone Blue in a quick board tour by Jason Kridner. Schematics, PCB layout and Bill of Materials for the BeagleBone Blue are available on GitHub.
BeagleBone Blue is available from Arrow, Element14 and Mouser. Compatible accessories such as robot chassis and cable assemblies are listed on the BeagleBone Blue wiki.
—Christine Long, Executive Director
articles Apply now for Google Summer of Code 2017 
BeagleBoard.org is a mentoring organization for Google Summer of Code 2017. The deadline for students to apply is April 3rd.
BeagleBone Blue at Embedded World 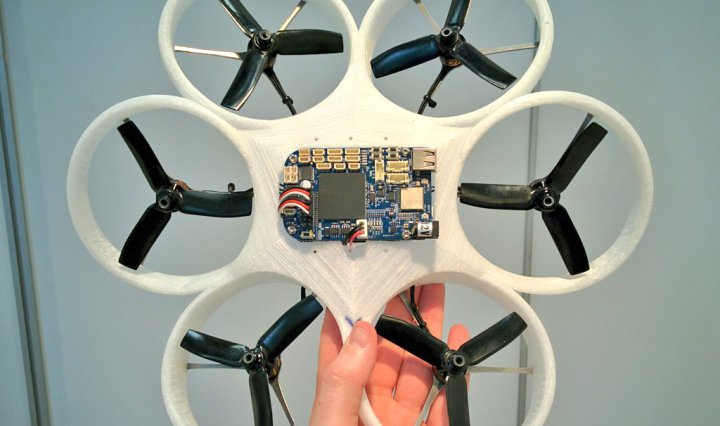
ARMDevices.net interviewed Jason Kridner and recorded BeagleBone Blue demos in our Embedded World booth.
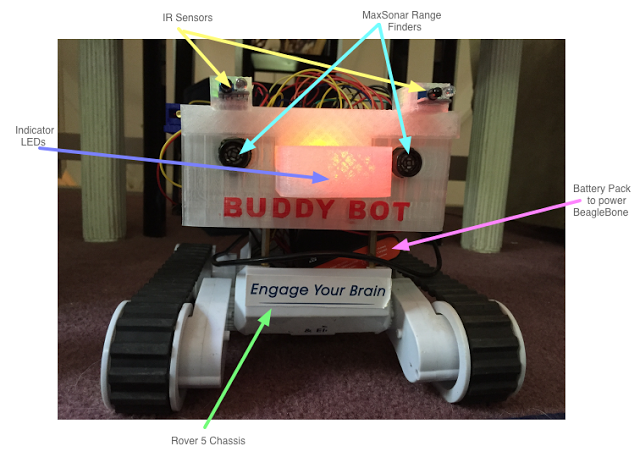
BeagleBone robotics with Swift 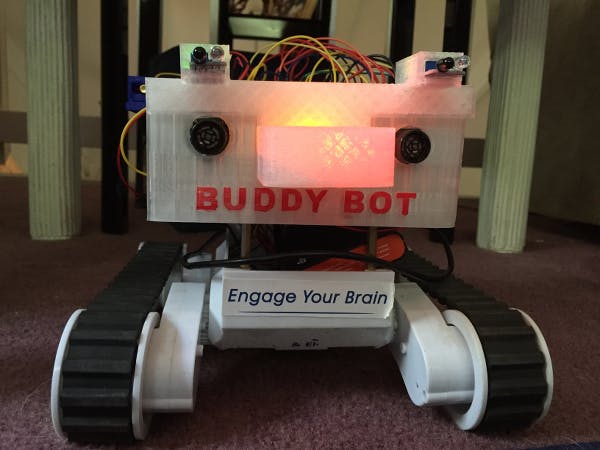
Jon Hoffman developed a Swift library to interact the BeagleBone's I/O pins, and he used the library to create BuddyBot, the 1st robot programmed in Swift.
hot off the presses 
Mastering Embedded Linux Programming
by Chris Simmonds. Harness the power of Linux to create versatile and robust embedded solutions
events SE Michigan BeagleBone Meetup - March 23, 2017
more »Midwest RepRap Fest - March 25-26, 2017
more »community topics New Debian 8.7 images Debian 8.7 (Jessie) 2017-03-19 images are now published. Windows and Mac users no longer need to install drivers for USB networking.
BoneScript 0.6.1 released Jason Kridner announced BoneScript is back under active development.
root login change Jason Kridner explains the recent change to disable ssh for root by default.
Why is pinmux-helper needed? Charles Steinkuehler describes the role of the pinmux helper driver.
featured projects 
ArduPilot on BeagleBone Blue
Mirko Denecke describes how to use BeagleBone Blue with ArduPilot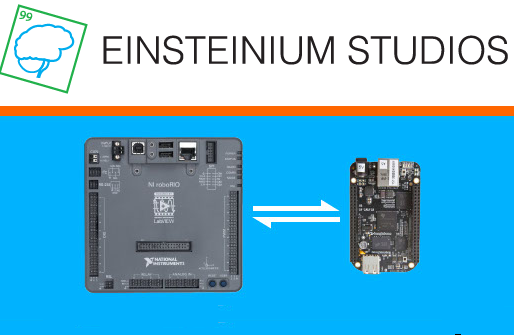
Using the roboRIO with the BeagleBone
Alek Mabry made this tutorial for using the BeagleBone with the roboRIO for FIRST Robotics Competition (FRC)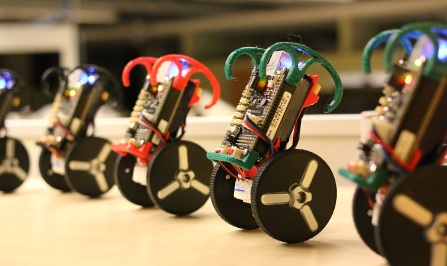
Running the EduMIP as a ROS Node
Using Robot Operating System (ROS) with an EduMIP balancing robot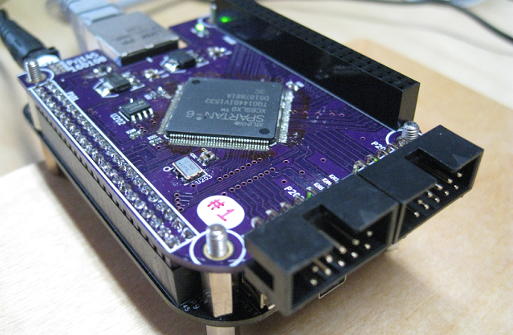
FPGA cape for BeagleBone Black
Jim Kleiner designed this minimalist hand solderable FPGA cape for the BeagleBone Black -
Midwest RepRap Festival this weekend!
03/23/2017 at 09:30 • 0 commentsWe look forward to seeing everyone at the Midwest RepRap Fest this weekend in Goshen, Indiana:
The 5th annual Midwest RepRap Festival is taking place March 24-26th 2017 in the same location as last year. Nestled in the middle of nowhere Indiana, you’ll find the largest gathering of 3D printers and 3D printing enthusiasts anywhere in the WORLD. With over 1,000 attendees each of the past few years MRRF has become the best 3D printing festival anywhere and we’re excited to do it again!
There is a full lineup of speakers on Saturday including @Jason Kridner of BeagleBoard.org:

-
New BeagleBone Debian images published
03/22/2017 at 07:41 • 1 comment @Jason Kridner writes:
@Jason Kridner writes:Debian 8.7 (Jessie) 2017-03-19 images are now published on https://beagleboard.org/latest-images, but this version isn’t likely to live more than a few weeks before we push yet another. The big update here is eliminating the need to install drivers for any of Windows, Mac or Linux host users when working over USB networking.
-
Apply for Google Summer of Code
03/20/2017 at 22:13 • 0 comments
Students can now apply to work with the BeagleBoard.org Foundation for Google Summer of Code: BeagleBoard.org Foundation
Refer to our previous post for more GSoC information
-
BeagleBone Blue at Embedded World (part 2)
03/19/2017 at 13:31 • 2 comments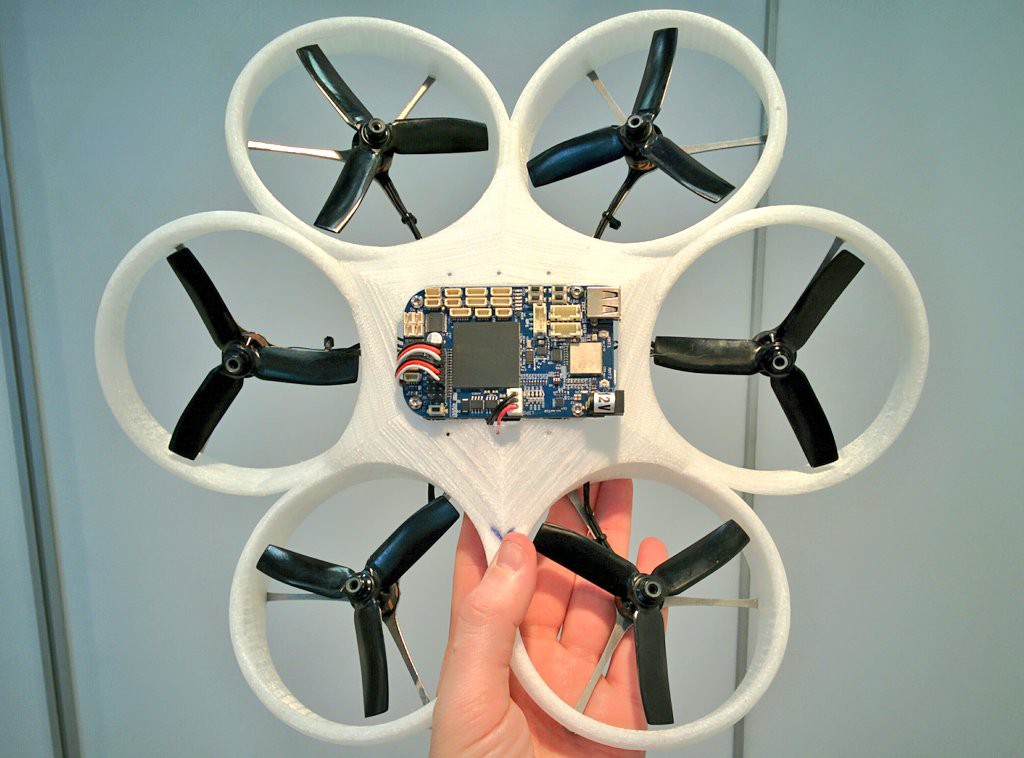
BeagleBone Blue video featuring Jason Kridner that was played in our booth at Embedded World:
All About Circuits writes about the Blue:
BeagleBone Blue for Robotics Applications
The BeagleBone Blue is now available. You can learn more about this open source robotics computer and its BeagleBone predecessors here.
Video by Shabaz Yousaf of BeagleBone Blue self-balancing robot:
Check out the previous post for more on BeagleBone Blue at Embedded World
-
BeagleBone Blue at Embedded World 2017
03/18/2017 at 16:20 • 0 commentsARMDevices.net video of the new BeagleBone Blue with @Jason Kridner in our BeagleBoard.org Foundation booth at Embedded World:
Find out more about the new BeagleBone Blue:
Meet BeagleBone® Blue. Robots. Fast.
-
Google Summer of Code 2017
03/09/2017 at 08:36 • 0 commentsWe’re excited to announce that BeagleBoard.org has been accepted as a mentoring organization for Google Summer of Code 2017:

Interested students are encouraged to review our 2017 GSoC ideas and begin interacting with our GSoC administrators and mentors on our GSoC mailing list and beagle-gsoc chat. Students can apply starting on March 20th.
We are also looking for additional mentors. Please visit our GSoC wiki page for more information on how to get involved.
Check out this presentation from to learn more about past Google Summer of Code projects for BeagleBoard.org:
Google Summer of Code and BeagleBoard.org from Drew Fustini -
BuddyBot: First robot programmed in Swift
02/17/2017 at 06:39 • 0 commentsJon Hoffman created a Swift library for interacting with the GPIO, PWM and Analog pins on the BeagleBone Black:

Jon used SwiftyBones to develop BuddyBot, the first robot programmed in the Swift:
Learn more about Swift in in Jon's book:

Learn to build fast and robust applications on the Linux Platform with Swift
-
Embedded Linux Conference 2017
02/02/2017 at 05:09 • 0 commentsThe Linux Foundation’s annual Embedded Linux Conference North America is coming up in few weeks:

Embedded Linux Conference 2017
February 21 – 23 in Portland, Oregon
We’ll be having a “Birds of a Feather” (BoF) discussion on topics related to BeagleBoard and BeagleBone:
- BeagleBoard and BeagleBone BoF
- Tuesday, February 21, 3:00pm – 3:50pm
Jason Kridner will be speaking:
- Educational Robotics Critical for the Future of Linux
- Wednesday, February 22 10:40am – 11:30am
Drew Fustini will also be giving a talk:
- Google Summer of Code and BeagleBoard.org
- Wednesday, February 22, 11:40am – 12:30pm
- BeagleBoard and BeagleBone BoF
-
BeagleBone Laundry Notification Texter
01/14/2017 at 20:57 • 0 commentsThis project on Digi-Key aims to make domestic life a bit easier:
How to Make a BeagleBone-Based Appliance Notification Texter
Once a washer or dryer cycle has started, users have to wait up to an hour for them to finish their cycles. Too often, they forget to check in on the appliances so wet clothes sit clumped for hours, while dry clothes sit to wrinkle, leading to user frustration.

While this project will show you how to set up the BeagleBone Green or BeagleBone Black to send an alert text to any cellphone when the wash or dry cycles are completed to eliminate this frustration, what you learn can be applied to any motion-sensing project.
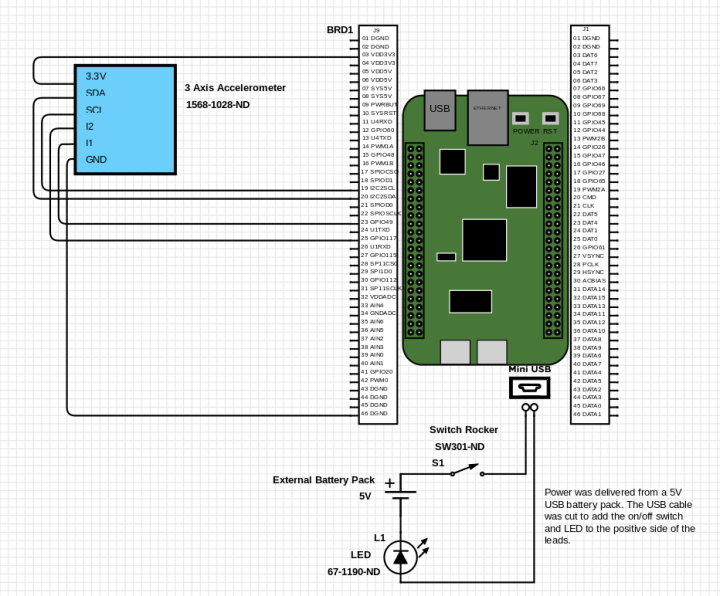
This is a real-world problem/solution scenario that is solved using the Internet of Things (IoT), an accelerometer, the BeagleBone, some extraneous hardware and some light programming. By following along with the process, you will get familiar with the workings of the BeagleBone (Green or Black) and in doing so it may fire your imagination for other applications.
In the meantime, you might want to make this for yourself, your significant other, or a friend
-
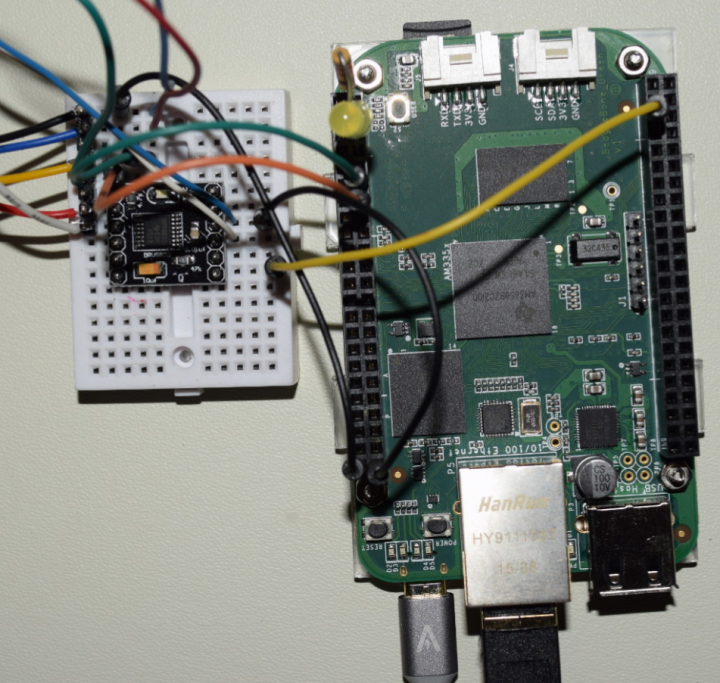
Motor Speed Control using BeagleBone PRU
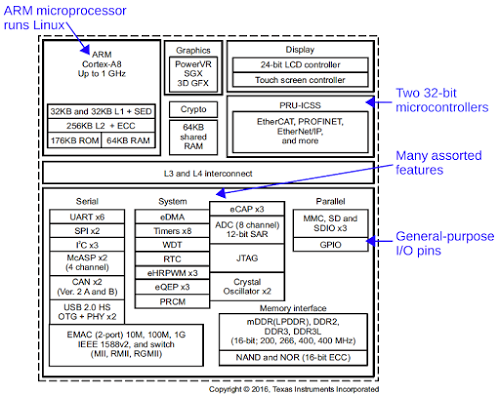
12/31/2016 at 06:51 • 0 commentsGreg Raven created this motor speed controller based on a Texas Instruments demonstration project. His implementation uses RemoteProc and RPMsg framework to connect the PRUs (Programmable Real-time Units) to Linux userspace. The PRUs are 32-bit RISC processors which offload real-time tasks from Linux running on the ARM processor.
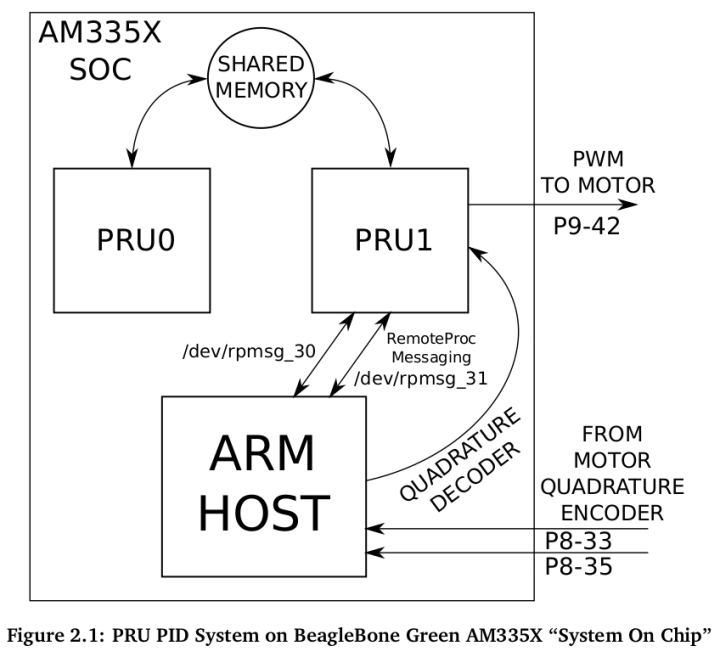
The system implements a Proportional Integral Derivative (PID) controller. The controlled parameter is the rotational speed of a DC motor. The DC motor is fitted with a quadrature encoder which provides both RPM and directional data.
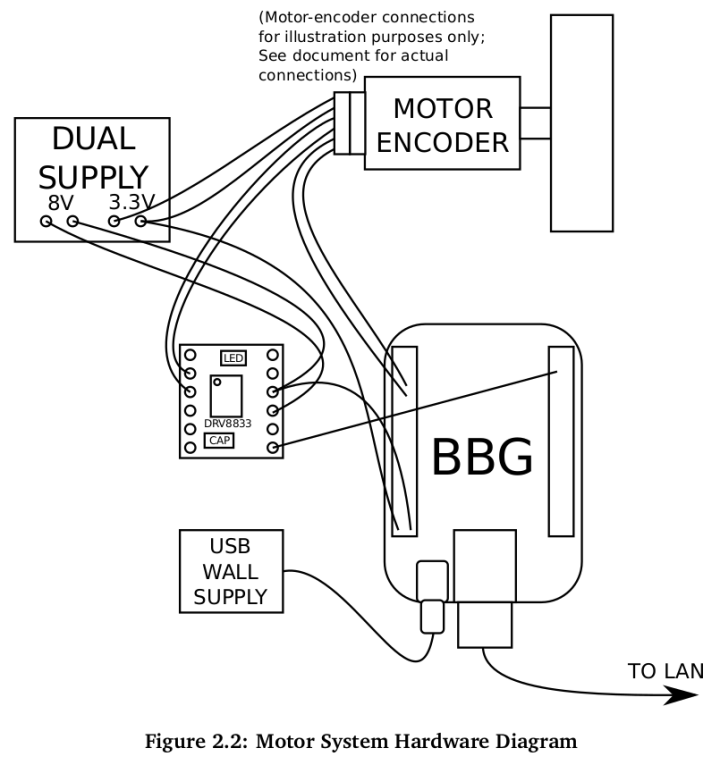
The quadrature encoder outputs are connected to the P8 header on the BeagleBone. The DC motor is controlled with a Pulse Width Modulation (PWM) signal from a pin on the P9 header. The PWM peripheral resides on PRU1. The quadrature decoder peripheral is located outside the PRU and is accessed via the internal bus.
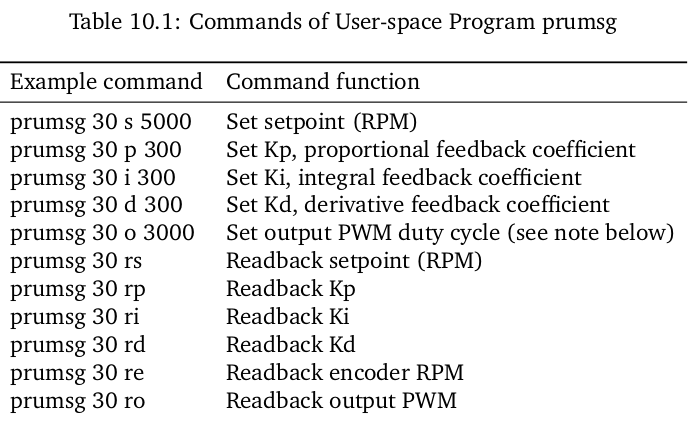
The PID loop is a controlled by a userspace program. The program communicates with the PRU via character devices instantiated with the RemoteProc messaging driver.
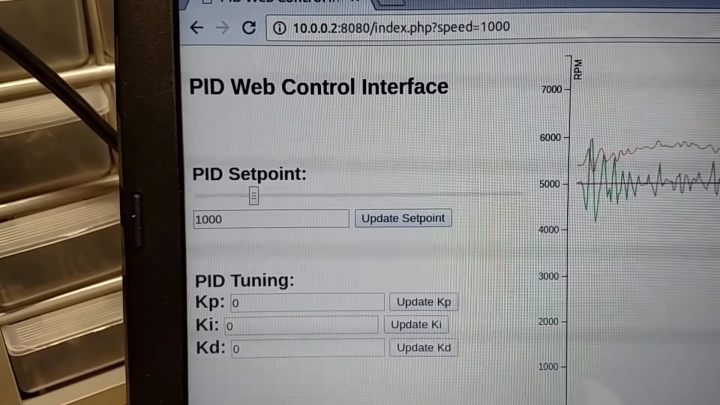
A web server runs on the BeagleBone and allows a web browser to graph the control loop behavior.
Resources
The source code is shared on GitHub:Greg-R/pru-pid-motor
The project details are shared on Hackster.io:
PRU PID Motor Speed Controller
The main documentation file [PDF]:
Motor Speed Control Using Beaglebone PRU
-
Blinking a LED with Rust
12/24/2016 at 05:44 • 0 comments
Rust is a systems programming language that is quickly growing in popularity. Christopher Woodall chose Rust to develop a drink making robot powered by BeagleBone Green Wireless:
Rusty Nail
Christopher has written development notes about using Rust on BeagleBone:
Setting up a BeagleBone with Rust
We will use rustup which is a rust toolchain installer similar to rvm or virtualenv
Blinking a LED with Rust
Use
sysfs_gpio. This following program blinks an LED on and off every 2 secondsBeaglebone, Rust, and PWM chips
Found a pwm library from posborne which works with sysfs
-
PRU Interface to ADC using RemoteProc and RPMsg
10/28/2016 at 03:22 • 0 comments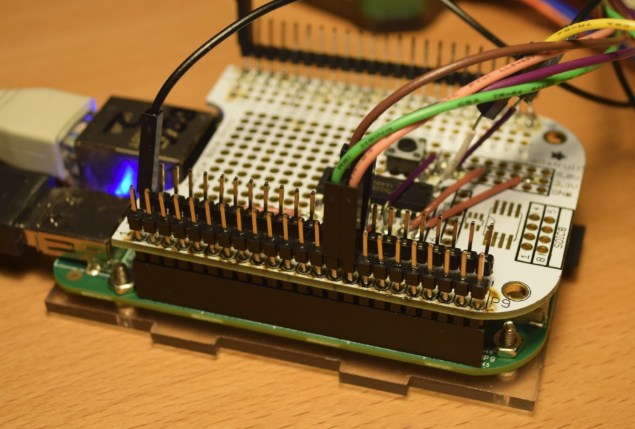
Greg R recently posted on the BeagleBoard.org mailing list about a BeagleBone Green project that he’s been working on:
PRU Interface to ADC using RemoteProc and RPMsg
The project is hosted on GitHub:
Greg-R/pruadc1
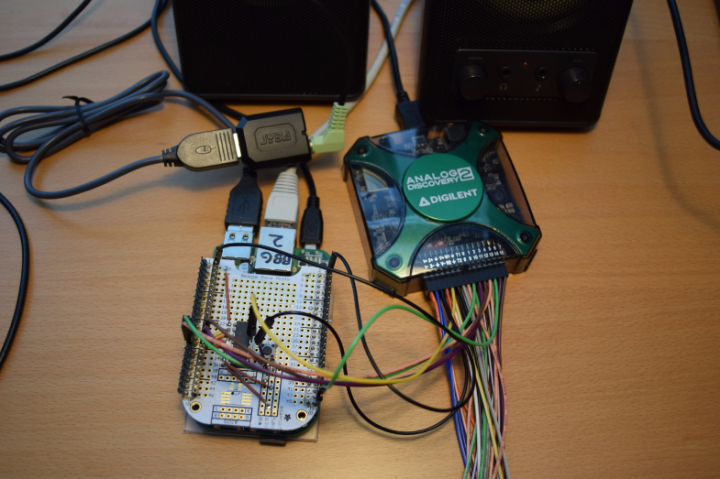
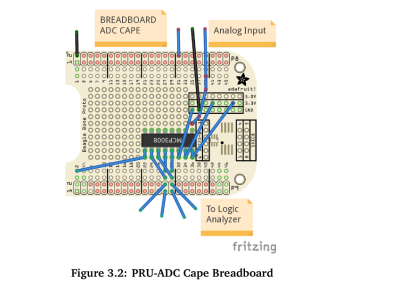
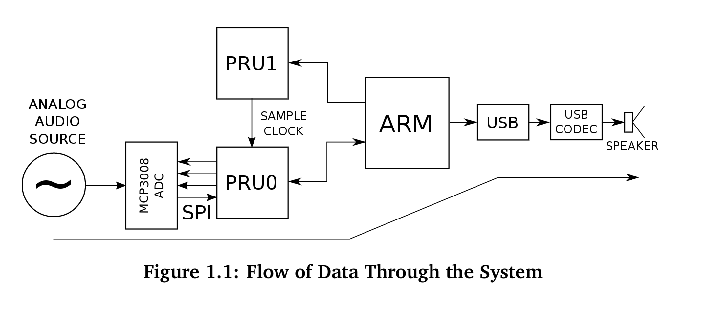
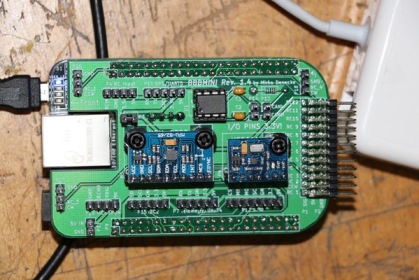
The goal of this project is to perform real-time digitization of an analog audio waveform, and then to make the digital data-stream available for manipulation within the Linux user-space via the “Advanced Linux Sound Architecture”. The Analog-to-Digital Converter (ADC) is a type MCP3008 and is connected via SPI bus to one of the two “Programmable Real-Time Units” included with the Beaglebone system.
Detailed documentation is in the file PRUADC1.pdf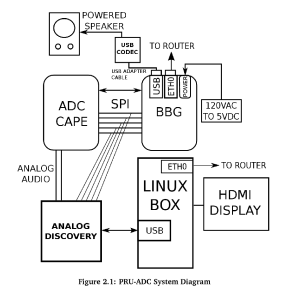
Greg describes the project in this video:
-
BeagleBone projects by Adam Vadala-Roth
10/26/2016 at 18:12 • 0 comments
@Adam Vadala-Roth has created a couple BeagleBone projects that others may find useful:
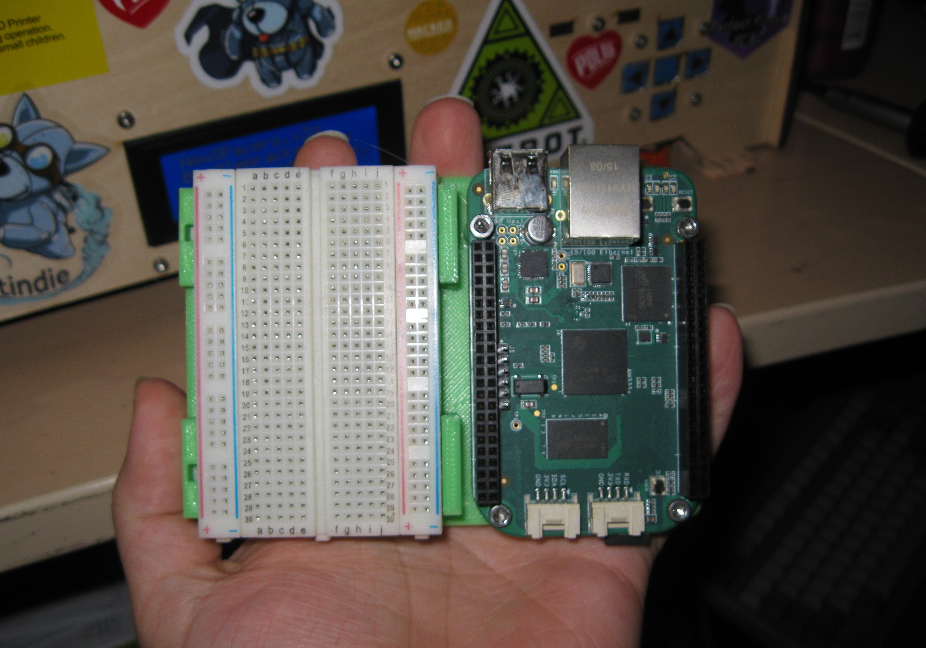
Beaglebone Black and Breadboard Plate
A 3D printable plate that holds a Beaglebone black compatible board and a breadboard together side by side.
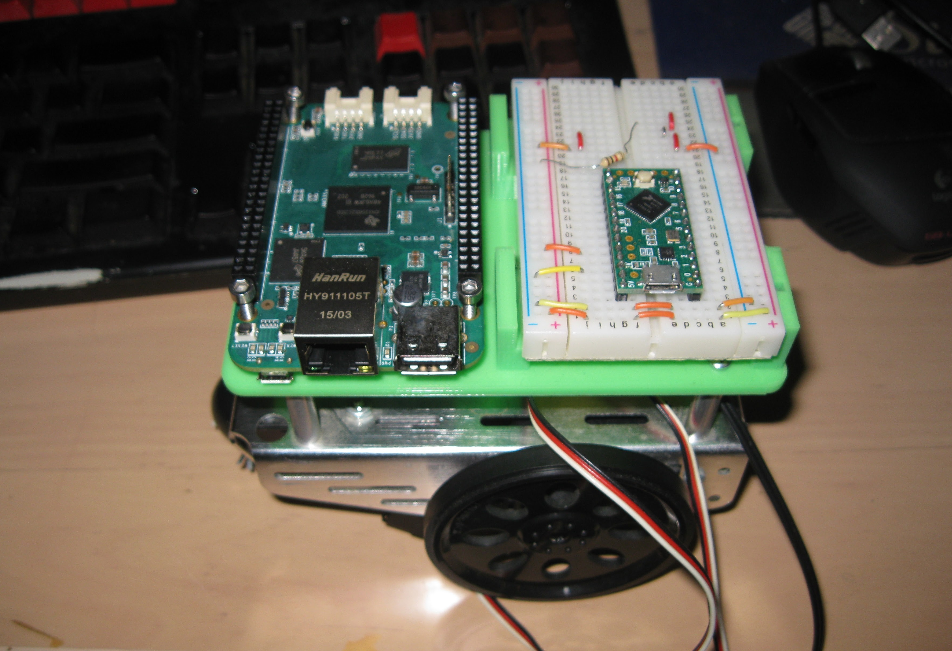 Vintage Parallax Robot Restoration
Vintage Parallax Robot RestorationGot a neat little Parallax robot from a friend of a friend who passed away. Gonna revitalize it with my Beaglebone Green & SLAM Navigation
-
How to Connect a BeagleBone Black to the Internet Using USB
10/19/2016 at 21:23 • 0 comments
Christopher Rush describes an alternative way to get a BeagleBone online: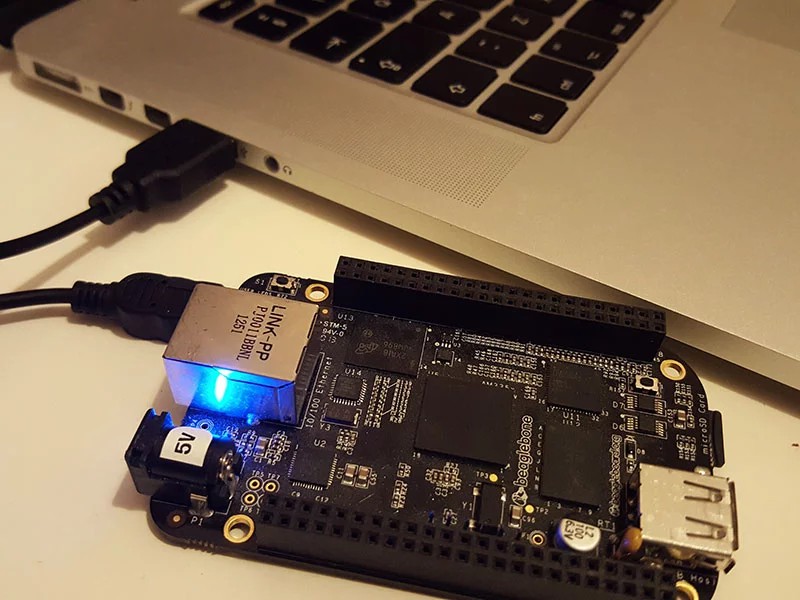
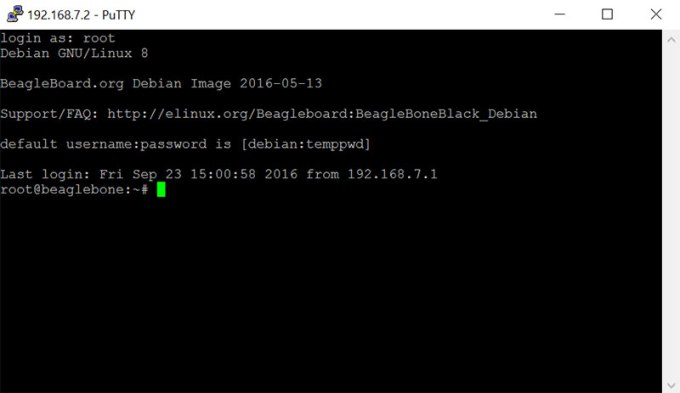
How to Connect a BeagleBone Black to the Internet Using USB
I was able to use my wireless internet on my laptop computer and share this with the BeagleBone with only a few steps.
Connecting your BeagleBone Black to the Internet without any physical network device such as Ethernet or wireless dongle is definitely a very useful tool. It allows you to work more efficiently without the headache of being near a router or requiring any additional hardware. This solution isn’t without its issues such as slower speeds however; it works well for using basic internet tasks such as running updates.
-
Open Hardware Summit 2016
10/12/2016 at 19:43 • 0 comments
Slides from Jason Kridner's talk at Open Hardware Summit last Friday in Portland:
https://beagleboard.org/static/presentations/OHS2016_JasonKridner.pdf
Recorded video stream of Open Hardware Summit:
http://www.ustream.tv/recorded/92027910

-
Meet BeagleBone Black Wireless, the newest board in the BeagleBone family
09/27/2016 at 23:28 • 1 commentReplacing the 10/100 Ethernet port with onboard 802.11 b/g/n 2.4GHz WiFi and Bluetooth, the popular open source BeagleBone Black computer now comes with built-in wireless networking capability:
BeagleBone Black Wireless introduces the Octavo Systems OSD3358 SiP (system-in-package) which integrates BeagleBone functionality into one easy-to-use BGA package.
The board is open source and designed in CadSoft EAGLE:
beagleboard/beaglebone-black-wireless
This combination of an easy to use system-in-package and affordable design tools brings an entire new level of access for people wanting to make their own customized variations.
BeagleBone Black Wireless is fully software, hardware and mechanically compatible with BeagleBone Black, and is even compatible with all existing BeagleBone Black capes for hardware expansion, integration, and peripherals.
For more details, visit https://beagleboard.org/wireless
-
Murgen: Open Source ultrasound imaging
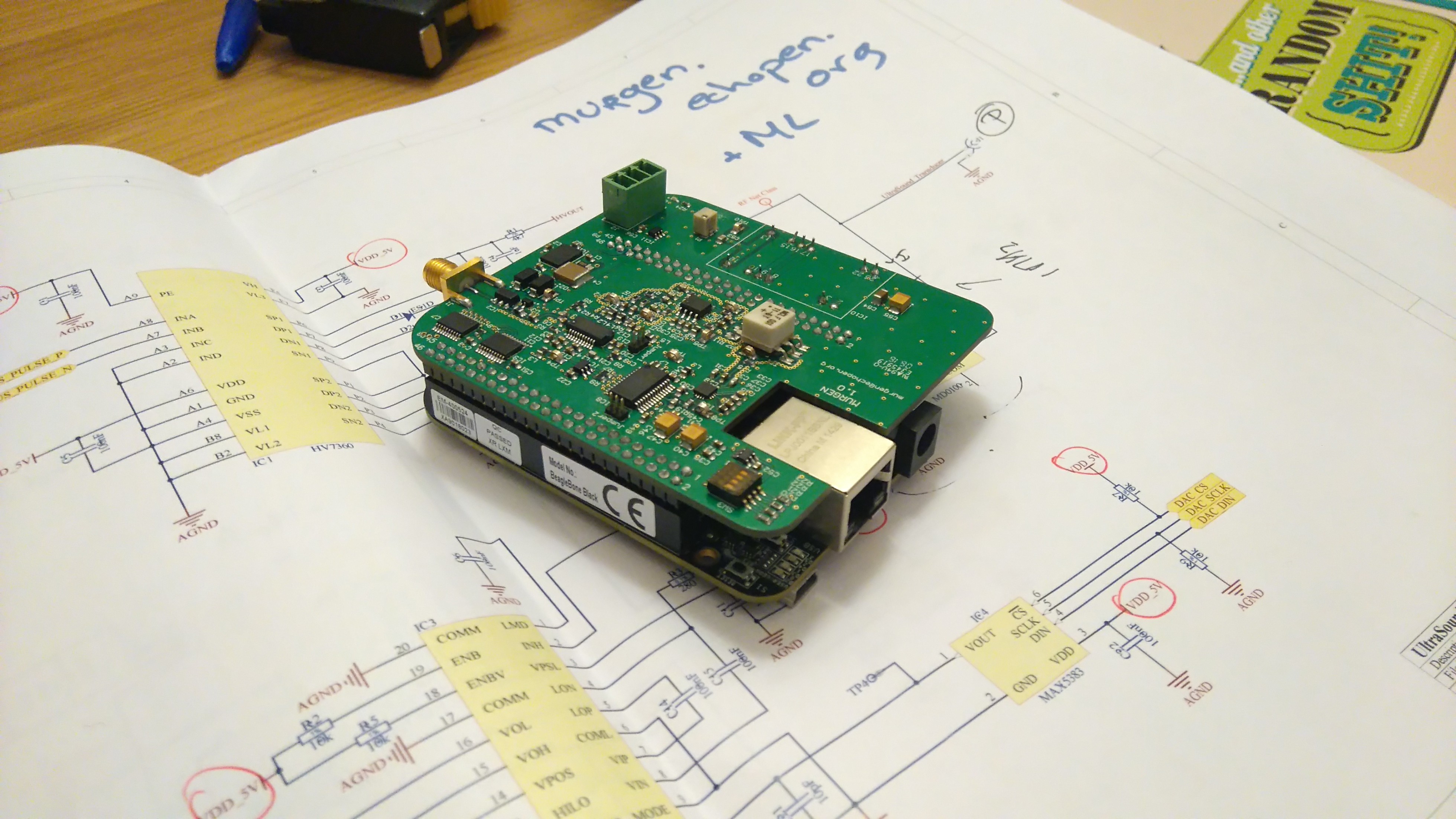
09/03/2016 at 05:10 • 1 comment@kelu124 has created an ultrasound imaging project on hackaday.io that uses the BeagleBone:
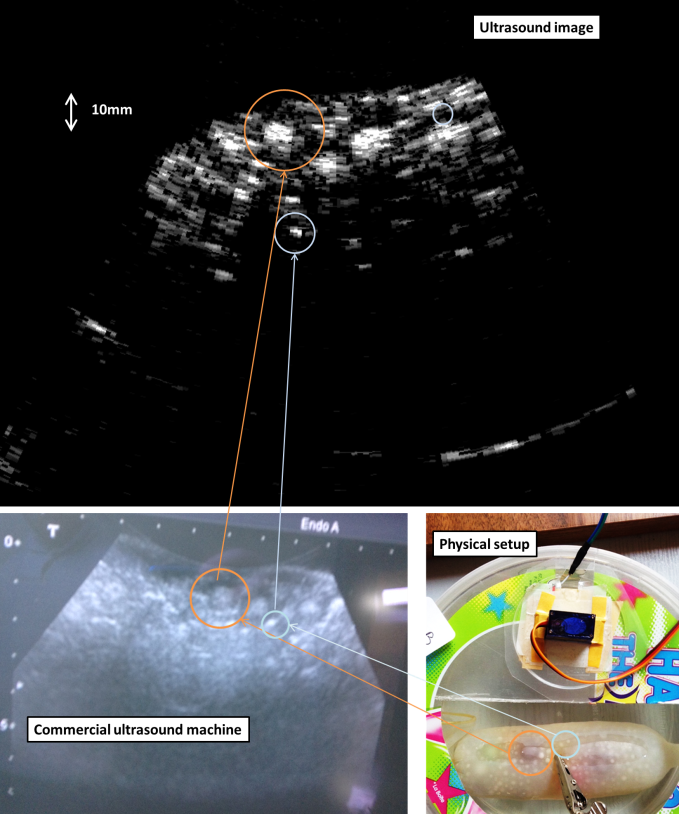
Murgen: open source ultrasound imaging
This project, Murgen, has a specific target of providing a technological kit to allow scientists, academics, hackers, makers or OSHW fans to hack their way to ultrasound imaging - below 500$ - at home, with no specific equipment required.
 The hardware design files and source code are hosted on GitHub:
The hardware design files and source code are hosted on GitHub:murgen-dev-kit
-
Hackerboat
08/30/2016 at 15:41 • 0 comments
@Pierce Nichols and the Hackerbot Labs team are building an autonomous boat capable of doing sonar surveys of dive sites:
Hackerboat
An autonomous boat of unusual size
Pierce recently wrote about the latest news from the project:

Hackerboat Progress
Since the last update, we’ve gotten in the water one more time (in late July) and we’ve made some substantial design changes. First off, here’s a video of my talk at Toorcamp that Alex was kind enough to put together
-
BeagleBone I/O pins: inside the software stack that makes them work
08/18/2016 at 19:20 • 0 comments
Ken Shirrif has written a great blog post with the goal of making the the internal operation of the Beaglebone will be less mysterious:
The BeagleBone's I/O pins: inside the software stack that makes them work
The BeagleBone's GPIO pins can be easily controlled through the file system, but a lot goes on behind the scenes, making it very mysterious what is actually happening. Examining the documentation and the device drivers reveals how these file system writes affect the pins by writing to various control registers. Hopefully after reading this article, the internal operation of the Beaglebone will be less mysterious.
-
Southeast Michigan BeagleBone Users Group
07/27/2016 at 20:38 • 0 commentsThe next meeting of the Southeast Michigan BeagleBone Users Group is tomorrow night, July 28th, at i3 Detroit:
Here’s some photos from past meetups:






-
Google Research ADC cape for BeagleBone
07/26/2016 at 05:44 • 0 comments
Jason Holt of Google announced the PRUDAQ cape yesterday:
Announcing an Open Source ADC board for BeagleBone
We wanted to measure the strength of a carrier. We started wit traditional analog circuits — amplifier, filter, envelope detector,threshold. You can see some of our prototypes in the image below; they get pretty messy.
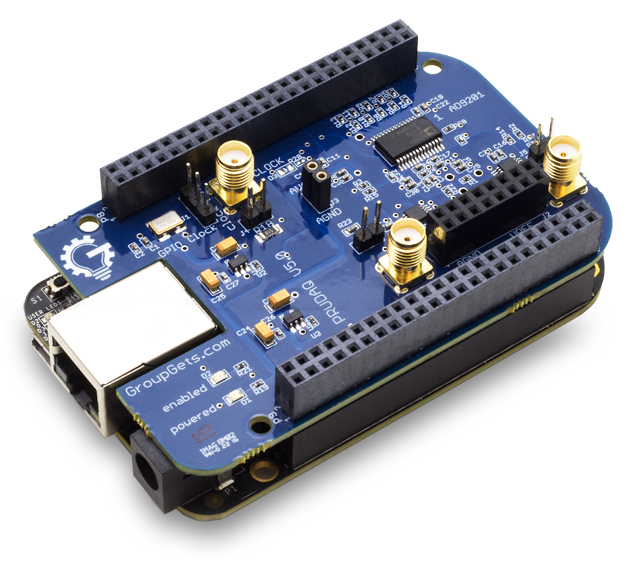
The result is an open source BeagleBone cape we’ve named PRUDAQ. It’s built around the Analog Devices AD9201 ADC, which samples two inputs simultaneously at up to 20 megasamples per second, per channel. Simultaneous sampling and high sample rates make it useful for software-defined radio (SDR) and scientific applications where a built-in ADC isn’t quite up to the task.
The design has been published on GitHub:
google/prudaq
GroupGets is offering a group buy for the board
PRUDAQ – 40MSPS DAQ BeagleBone Bundle
Google intern Kumar Abhishek added support for PRUDAQ to hisGoogle Summer of Code project BeagleLogic that performs much better than our sample code:
BeagleLogic: now also analog
Join the mailing list to give your feedback and keep update to date with the project.
prudaq-users
-
Google Summer of Code and BeagleBoard.org
06/29/2016 at 14:10 • 0 comments
BeagleBoard.org Foundation has 7 students participating in Google Summer of Code 2016:
Exposing the PRU as an I2C and SPI master ControllerGain extra serial interfaces without wasting valuable CPU cycles in bitabanging.
- Student: Vaibhav Choudhary
- Mentors: Andrew Bradford, Matt Porter
- Source Code
- Wiki
SPI slave driver implementation
Help the BeagleBone community to write applications based on SPI much more easily
- Student: Patryk Mężydło
- Mentors: Michael Welling, Andrew Bradford, Matt Porter
- Source Code
- Wiki
- Blog
BeagleScope
Utilize the two PRUs [..] and their low latency architecture to get a fast, generic, parallel analog converter interface
- Student: Zubeen Tolani
- Mentors: SJLC, Abhishek Kumar, Michael Welling, Hunyue Yau
- Source Code
- Wiki
- Blog
- Slides [PDF]
Porting soundcard drivers to BeagleBoard-X15
port the soundcard drivers to the BeagleBoard-X15 and create an user-space library to make use of DSPs
- Student: Henrik Langer
- Mentors: Robert Manzke, Vladimir Pantelic
- Code: GSoC-2016 & beagle-linux
- Wiki
- Blog
API support for Beaglebone Blue
Create easy-to-use APIs for the hardware on the BeagleBone Blue
- Student: Kiran Kumar Lekkala
- Mentors: Alex Hiam, Micheal Welling, Kumar Abhishek, Deepak Karki
- Code: bb_blue_api
- Wiki
- Blog
Improving Bone101 Experience
Be friendly to novice developers, allowing them to [..] write Python code beside Javascript
- Student: Amr Ragaey
- Mentors: Jason Kridner, Alex Hiam
- Code: bone101
Sonic Anemometer
Create a sonic anemometer for small, inexpensive weather stations
- Student: Visaoni
- Mentors: nerdboy, Alex Hiam, Hunyue Yau

BeagleBoard Foundation's pages
The BeagleBoard.org Foundation is a US-based non-profit corporation existing to provide education in and promotion of the design