 Alex Muir
Alex MuirBackground
Cell grazing changes the focus of a grazing farm operation from raising animals to managing grasslands. The health of the land must be the priority, as in poor conditions productivity of the farm will be reduced. The most common style of grazing is continuous, where animals are left in an area for long periods of time, often the entire year and eat the grass as it begins to grow back. This results in more stress on the plant and hampered regrowth, eventually resulting in a loss of biodiversity of grasses.
Cell grazing is a time-control grazing method, however it differs from other time-control techniques such as block or strip grazing in that it has a holistic focus. The focus of cell grazing is on sustainability and optimising profit, rather than on maximising plant and animal growth. Holistic management is a whole farm planning method with the aim to deliver successfully on the triple bottom line, sustainable environmental, economic and social outcomes. Cell grazing essentially aims to maximise the harvest of sunlight, by implementing the following principals [1]:
- Control rest to suit the growth rate of the plant
- Adjust stocking rate to suit match carrying capacity
- Plan, monitor and manage the grazing
- Use short graze periods to increase animal performance
- Use maximum stock density for the minimum time
- Use diversity of plants and animals to improve ecological health
- Use large mob sizes to encourage herding
With the goal to [1]:
- Improve the biodiversity of the soil
- Increase the carbon in the soil, through the creation of topsoil
- Increase the drought tolerance of the grassland, through deeper roots and better water holding ability
- Increase animal productivity and health
Pioneers such as Allan Savory have been advocating the benefits of holistic management, and educating others on its implementation for over 50 years. He believes that desertification of land can be reversed by running more livestock, rather than the conventional response to run less or completely remove the animals and rest the land. This does not prepare the land for recovery though; when it rains the water simply runs off the dry bare land. If livestock are used correctly they can have a beneficial effect as they create many small divots in the ground, where water can soak in, and fertilise the soil with their dung.
There are many examples of people using this type of holistic management on their land and seeing real improvements. Almost all of the graziers who have won Australian Farmers of the Year awards since 2007 have described cell grazing as the core of their farm plan [2]. As an example, in a low rainfall area of South Australia, one grazier has gone from a ground cover of less than 50% to 70-80% in just 7 years of using cell grazing [3]. This increased ground cover means that with only 10mm of rain the paddocks produce feed, when previously the water just ran away. For scientific analysis of cell grazing see T. McCosker’s report [1].
Soil is the third largest sink of carbon in existence, after oceans and geologic sinks [4], so increasing the amount of carbon in the soil could present a safe and simple way to sequester carbon. Many of our modern farming practises are having the opposite effect of losing soil carbon, which reduces the productivity of the land, requiring more inputs to maintain fertility. The most effective way to increase the amount of soil carbon is to ensure that there is plant growth in the soil at all times [4]. Perennial grasses with good coverage and animals that are involved in the grasses life cycle have the potential to take carbon out of the air and store it in the soil.
The factors that make cell grazing a less attractive option than continuous grazing are, access to water, more fencing and increased time spent herding animals. Through smart layout of the cells it is possible to reduce the number of watering points required. The cost of fencing these additional smaller paddocks is significant, and therefore a major drawback...
Read more »








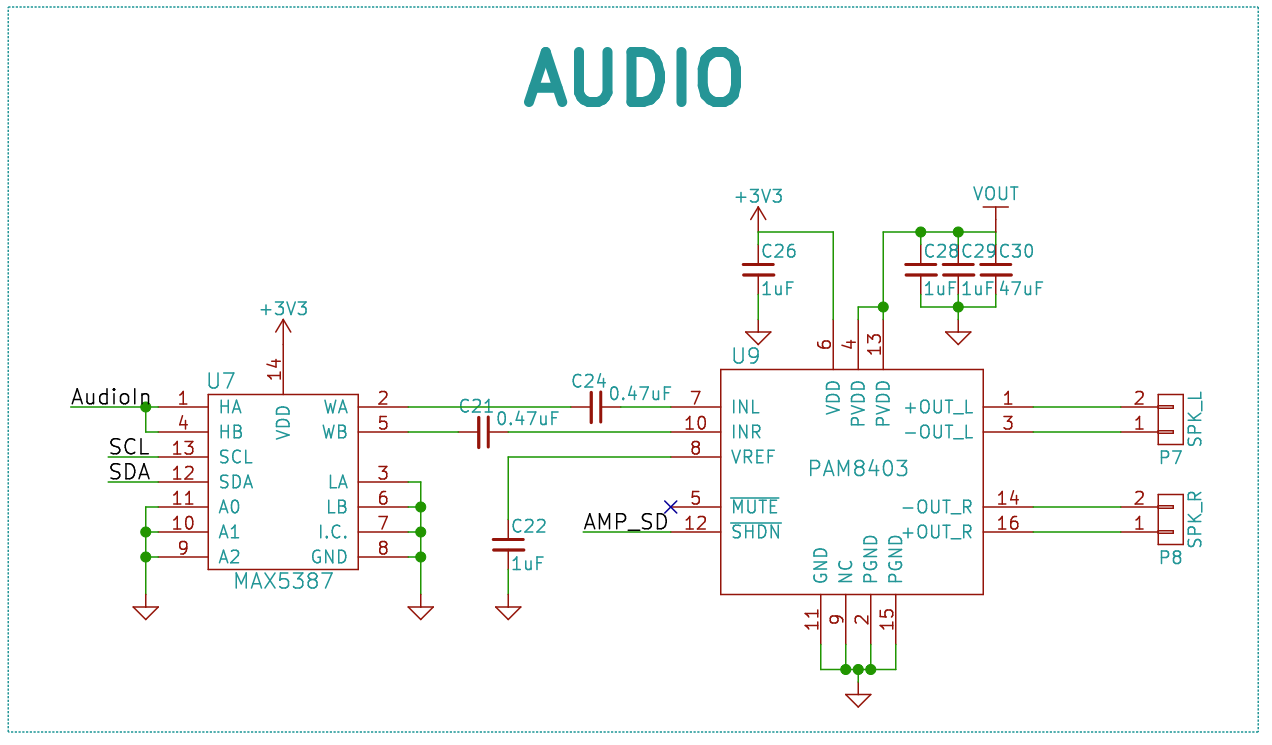
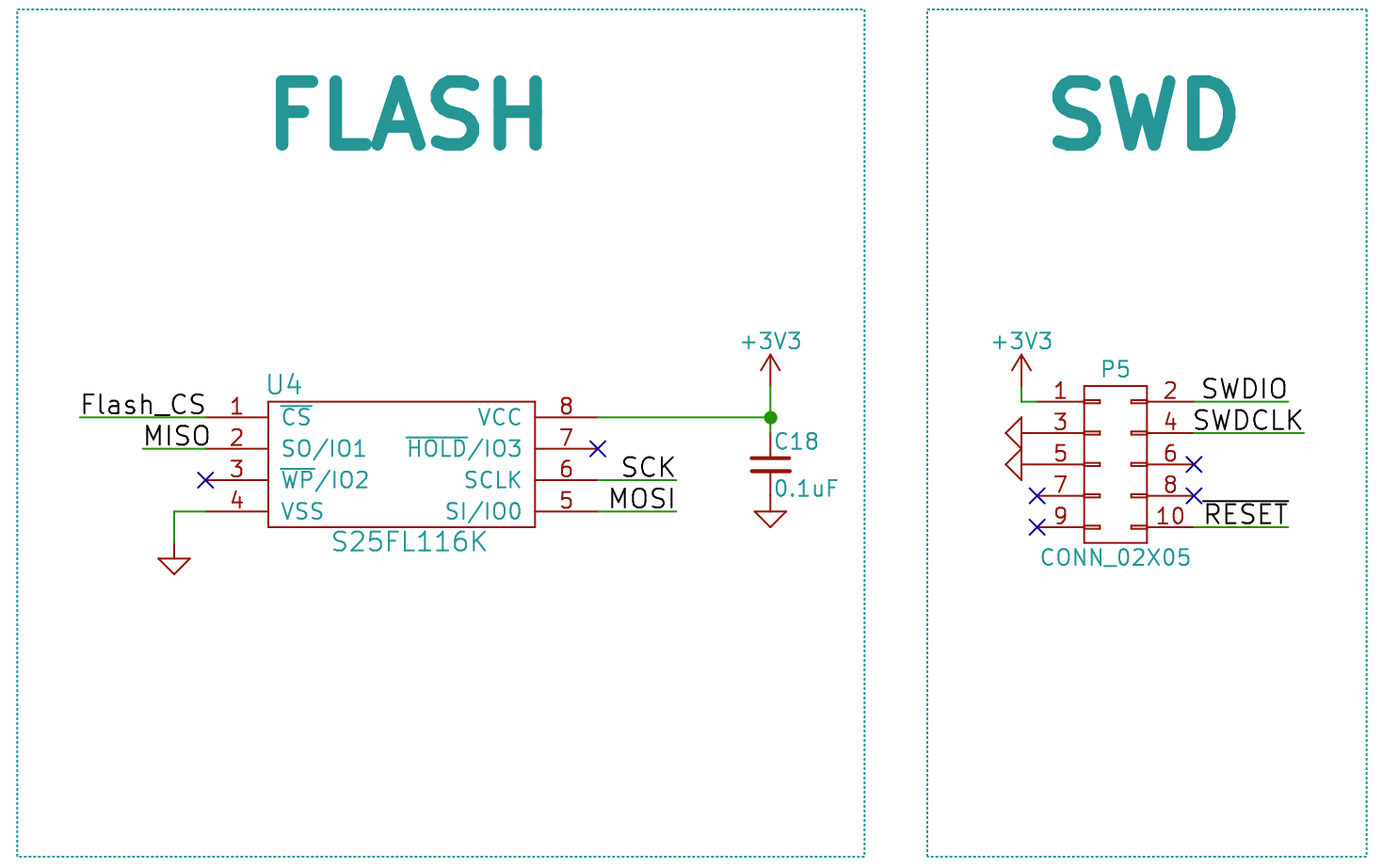
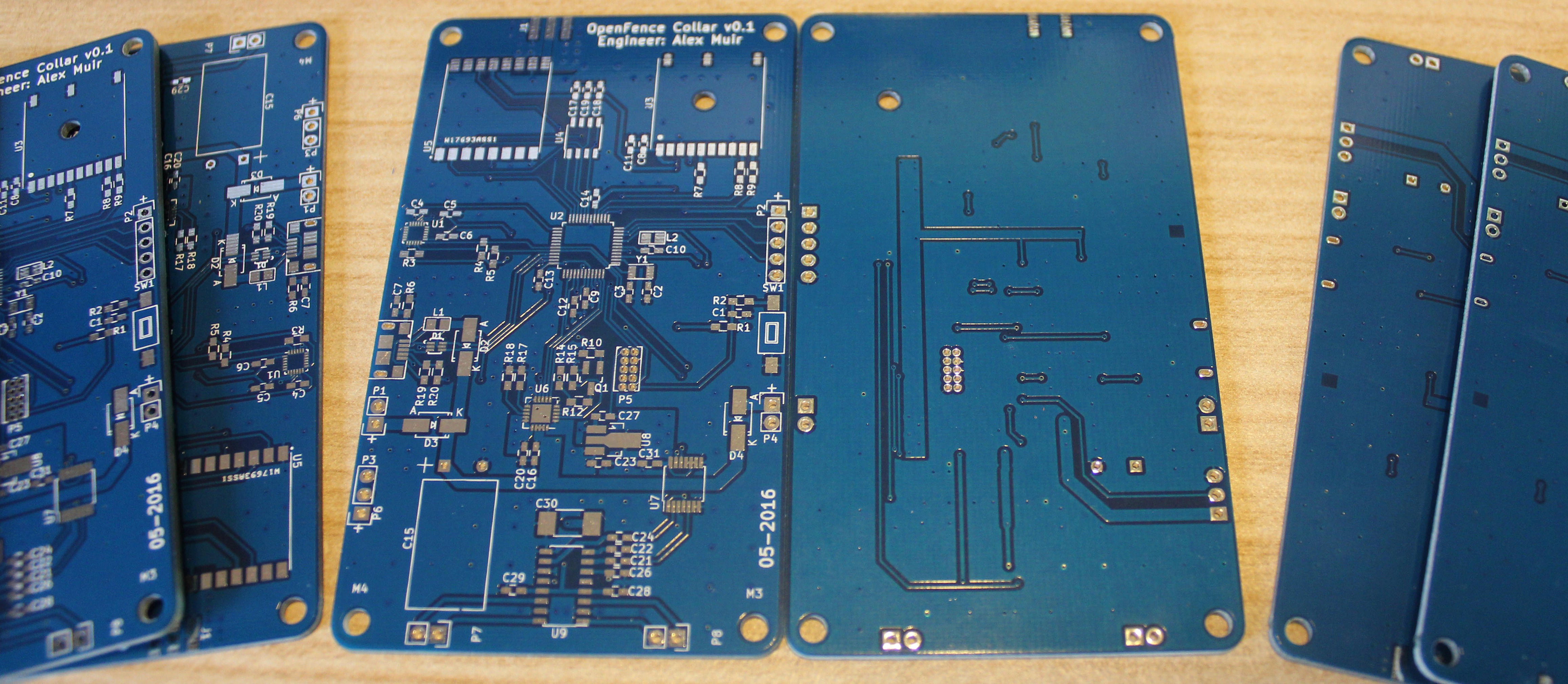 Components are starting to arrive. Soldering the components will be started once I have them all.
Components are starting to arrive. Soldering the components will be started once I have them all. 

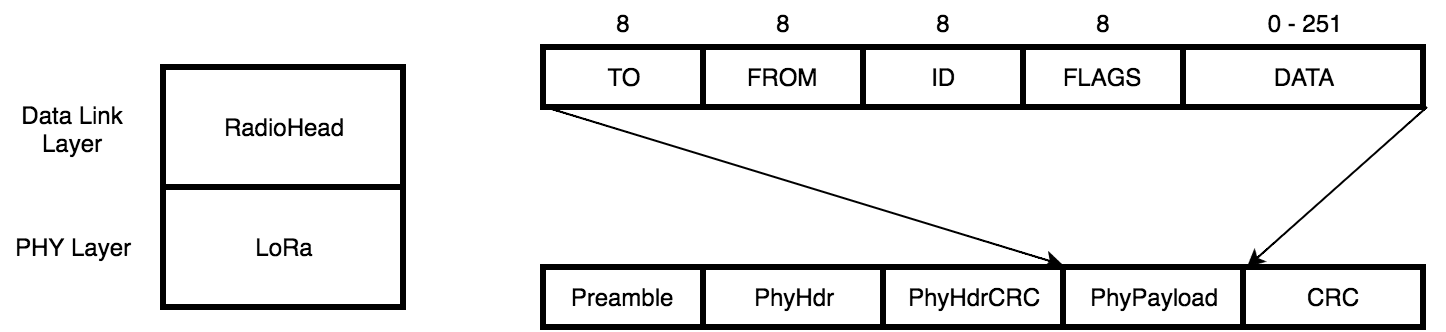
 RF and USB
RF and USB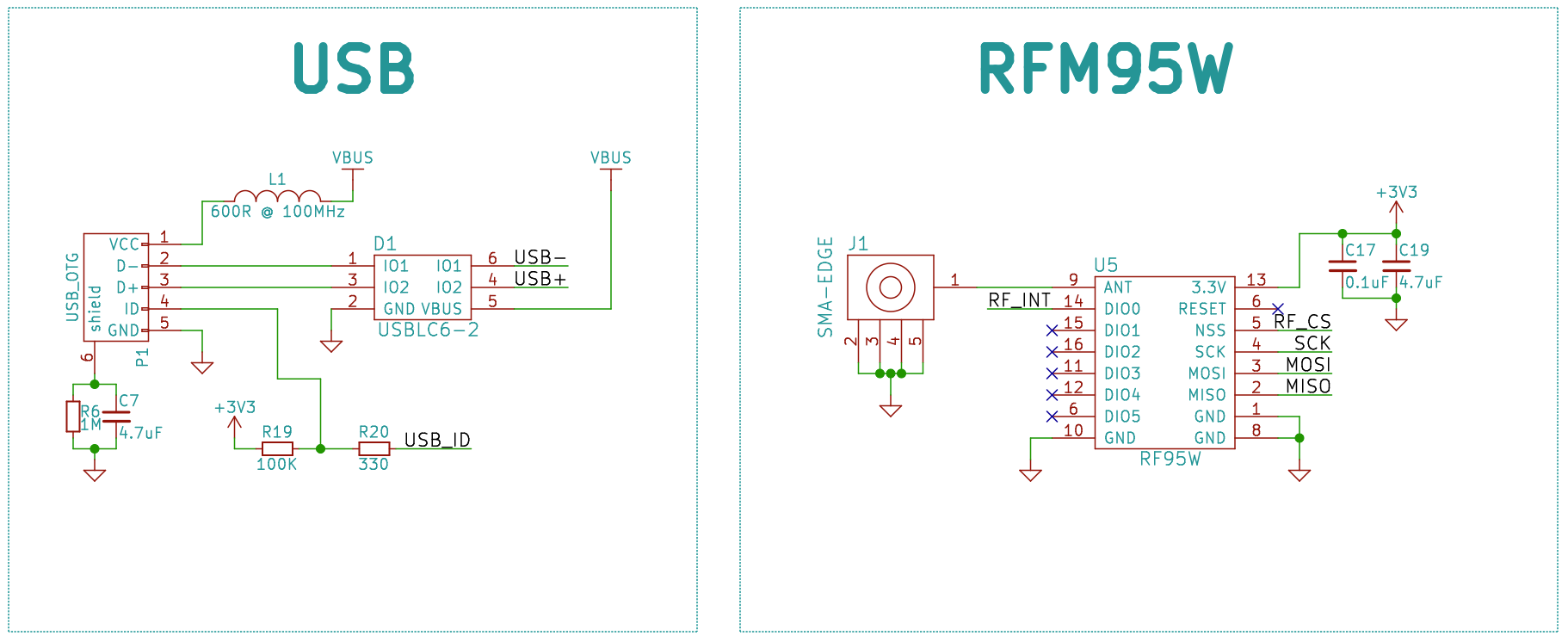
 GPS and IMU
GPS and IMU





 Hardie
Hardie
 Tyler Ward (Scorpia)
Tyler Ward (Scorpia)
 anfractuosity
anfractuosity
 Mark Atherton
Mark Atherton
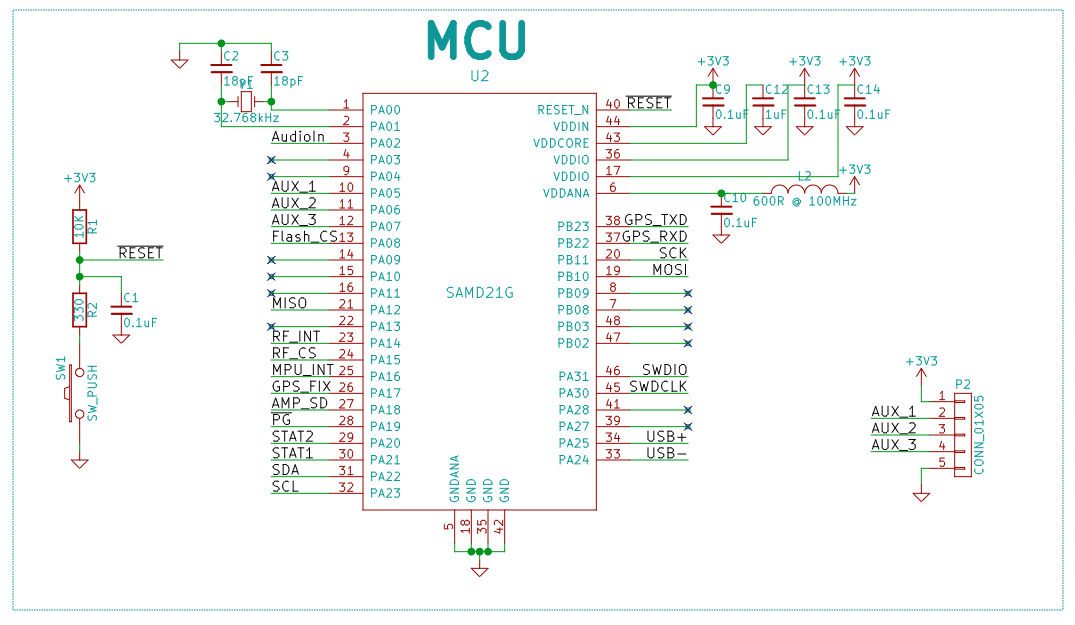
Hi Alex, I have an off topic question. You're not using an external 32k oscillator along with the SAMD21, which is standard configured in Arduino. On GitHub, you configured the internal 32k oscillator (OSCULP32K) In the sam-ba bootloader and the arduino core. Did you made some more changes for using the internal 32k oscillator? I can still measure power and frequency from the external oscillator with your openfence code... Thank you!