 kevarek
kevarekI have always wanted to have a remote controlled toy. Unfortunately (well given that every toy I had I have always disassembled maybe fortunately) I have never got one. So now when Im old enough, have needed knowledge and resources, I have decided to build one for myself from scratch to learn in a process. Quadcopter.
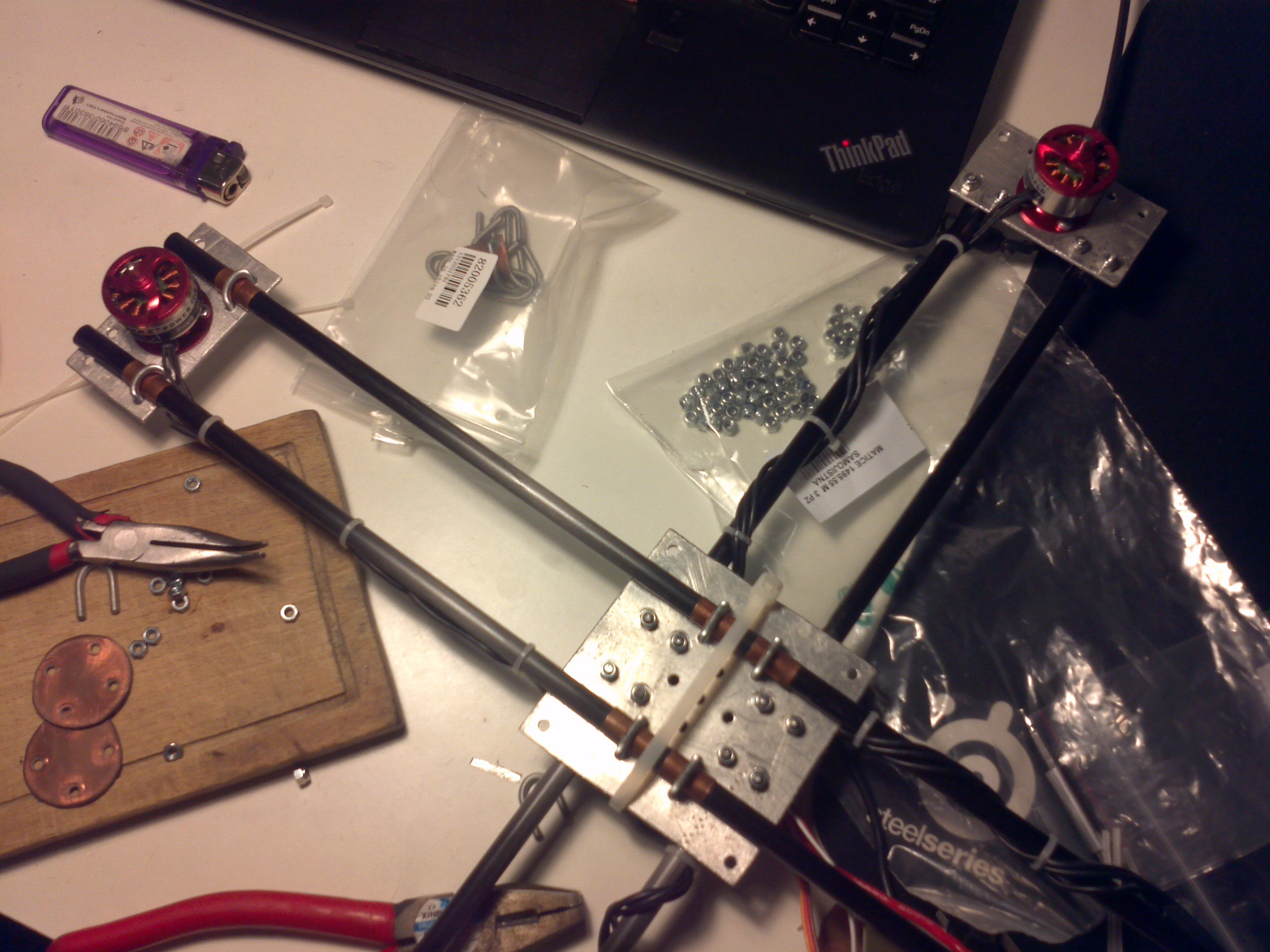
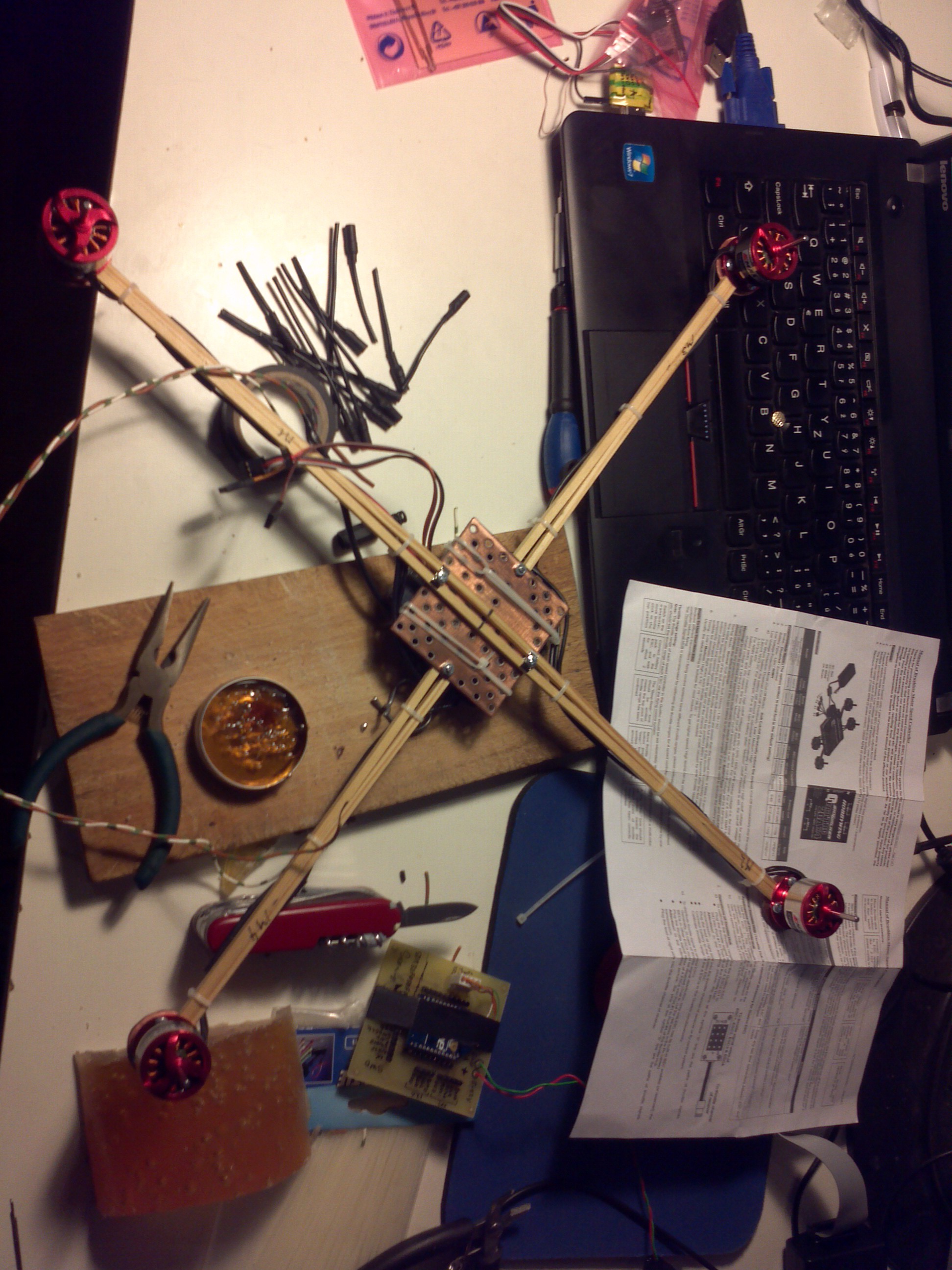
It looks very simple. Notebook, joystick, bluetooth, motors, battery and some wood for frame. Glue all together and its done. If you think that, you are gonna have a bad time (http://southpark.cc.com/clips/153300/thumper-the-super-cool-ski-instructor). :)
This quad is supposed to be a base platform for a lot of my future projects. I want this quad first to fly, than to be able to stay in the air, than to autonomously land, takeoff, travel. Side projects are to make a balancing module which allows balancing propellers while mounted on quad, small on-board camera that utilizes unused bandwidth of remote control channel to transfer pictures to PC, some software modules etc.





 Philip Zucker
Philip Zucker
 adria.junyent-ferre
adria.junyent-ferre

 ironBit
ironBit
Awesome (and ambitious) project, excited to see this one take shape!