kevarek
kevarek-
Flying in acrobat mode
02/10/2017 at 19:16 • 0 commentsJust quick update - I have made remote controller from PS2 controller transmitting via XBEE to the quadcopter, which is now flying in acrobat mode. Im going to log the process and fill the missing steps to project log first, before further development - stable flight mode, guided flight.
-
Frame assembly
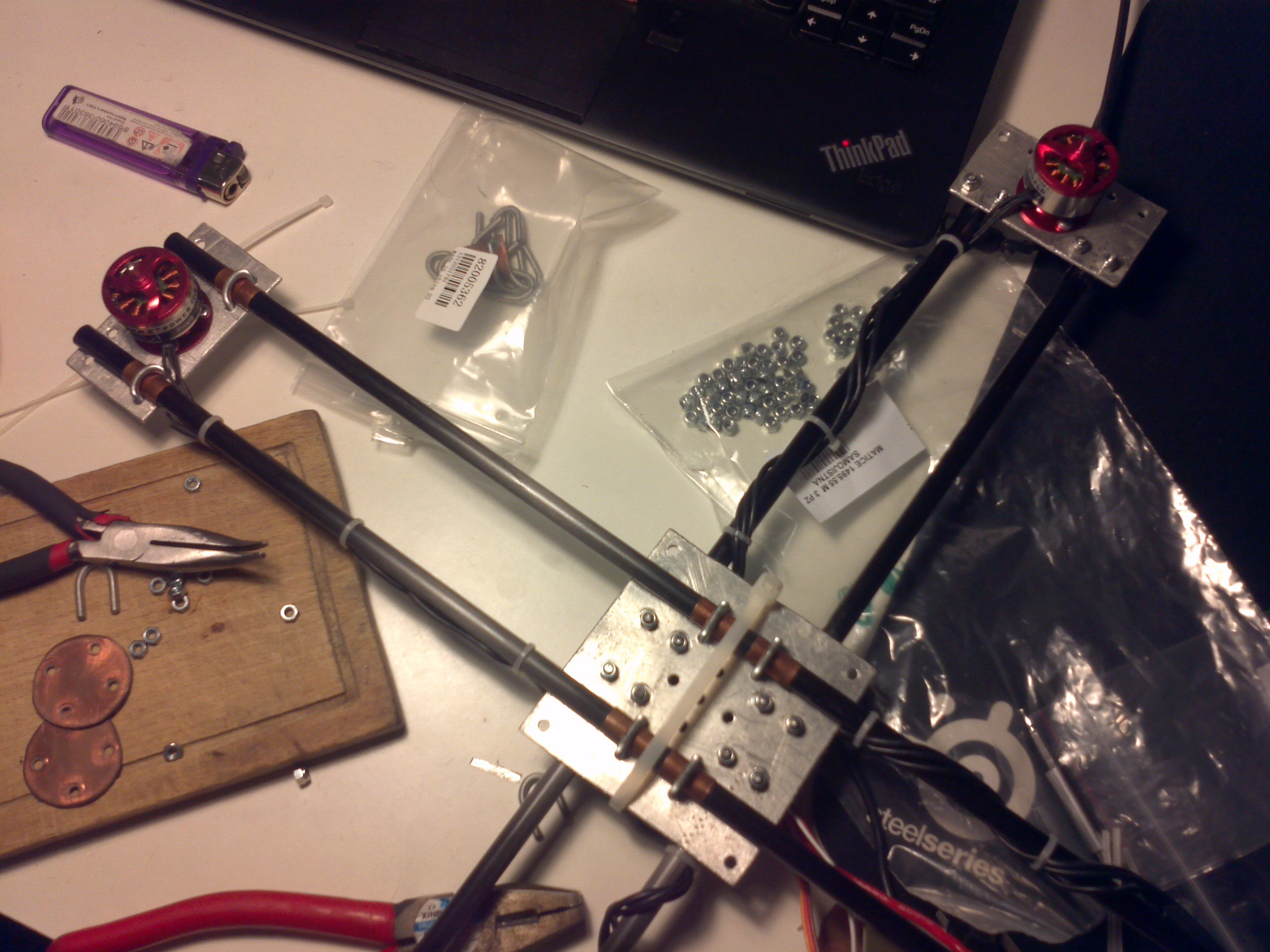
06/05/2016 at 18:52 • 0 commentsFrame is based on four equally long carbon fiber tubes attached to central and motor platforms with custom made U-shaped screws
![]()
Motor platform mounted with four U-screws to carbon fiber tubes.
![]()
Frame tubes are mounted to central platform from both sides using U-screws.
![]()
-
First naive wooden build
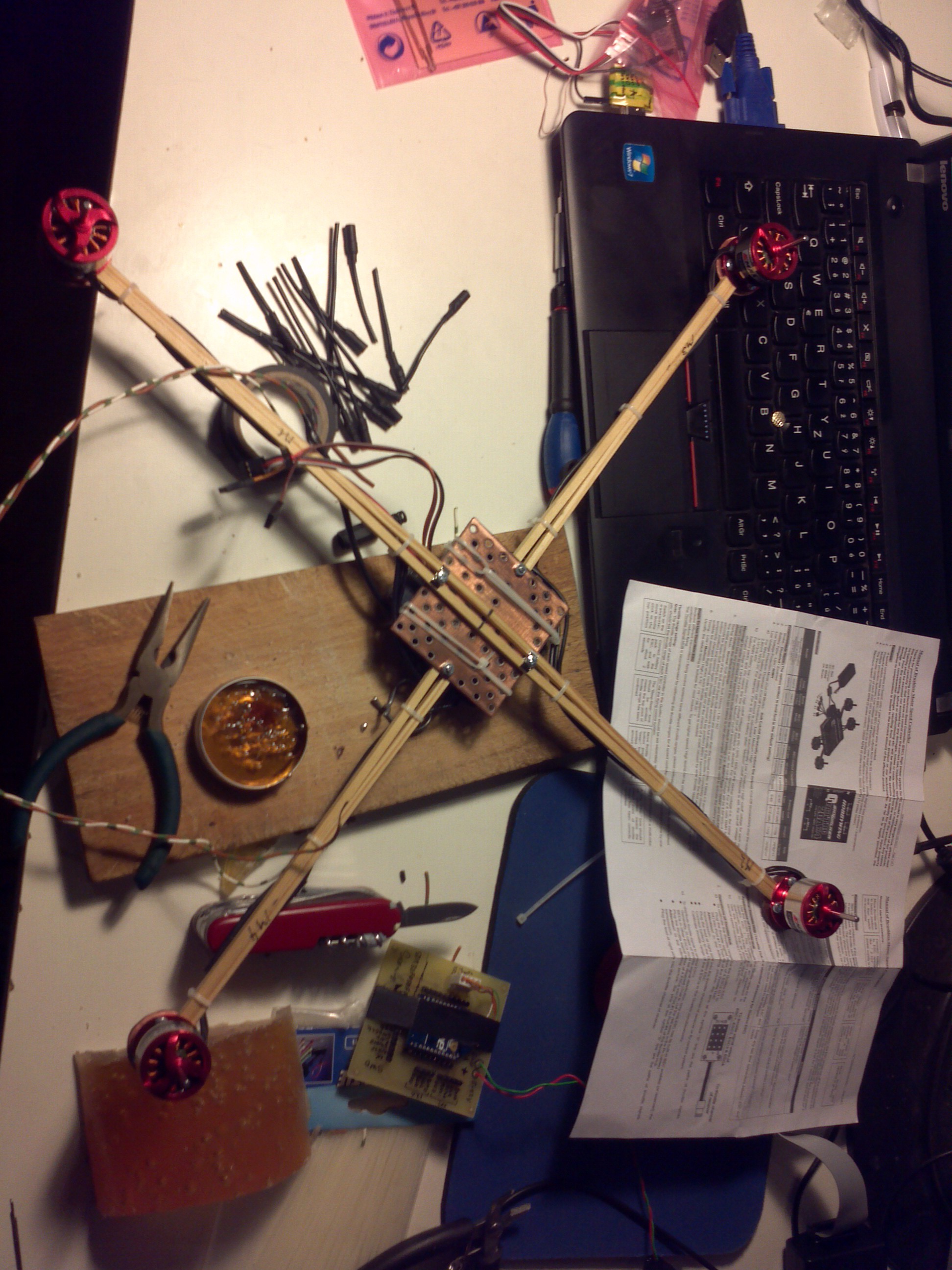
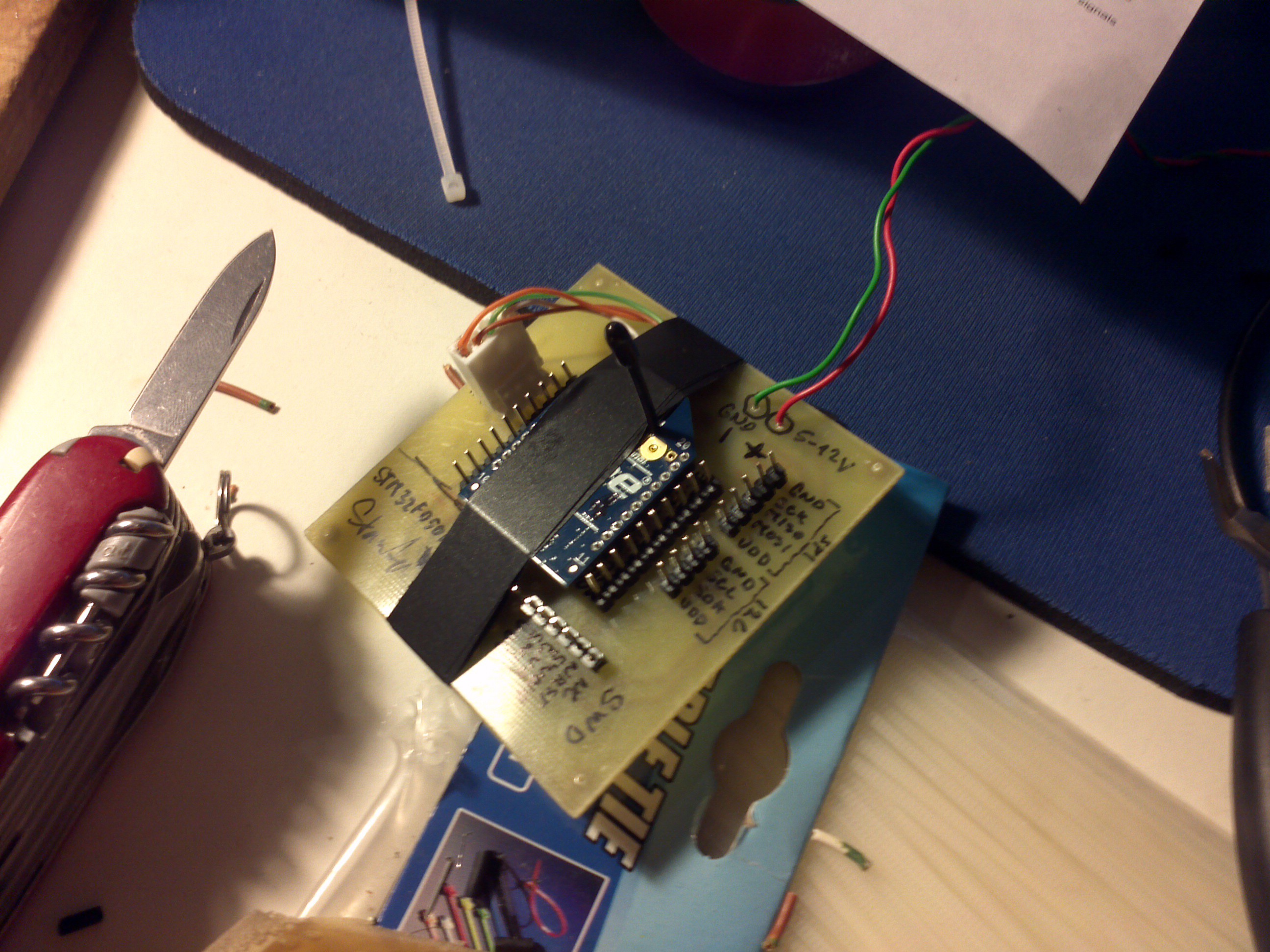
06/05/2016 at 17:30 • 0 commentsFor the documentation and history reasons here Im adding pictures of the first build. Wooden frame, low cost MCU STM32F05 and single layer PCB home made using toner transfer. Controlled with PC joystick. Errors made, lessons learned.
- No, even an automation engineer cant fix construction and HW flaws using very well tuned PID regulator
- Propellers are never truly balanced causing a lot of vibrations
- Frame must be solid, not bending much and not resonant around RPM frequencies
- Vibrations really mess with position measurement and PID regulation
- Big nope for controlling directly roll, pitch and yaw from sensor fusion - too slow and not stable
![Idea was to use small PCB as central platform, above it control circuit and below battery with ESC.]()
Idea was to use small PCB as central platform, above it control circuit and below battery with ESC.
![]()
![]()
Just another quadcopter from scratch project
Quadcopter build from scratch using carbon fiber tube frame, custom control HW based on STM32F3 MCU and custom FW using CMSIS RTX RTOS.