 Hacker House
Hacker HouseHere's a running list of our video parts:
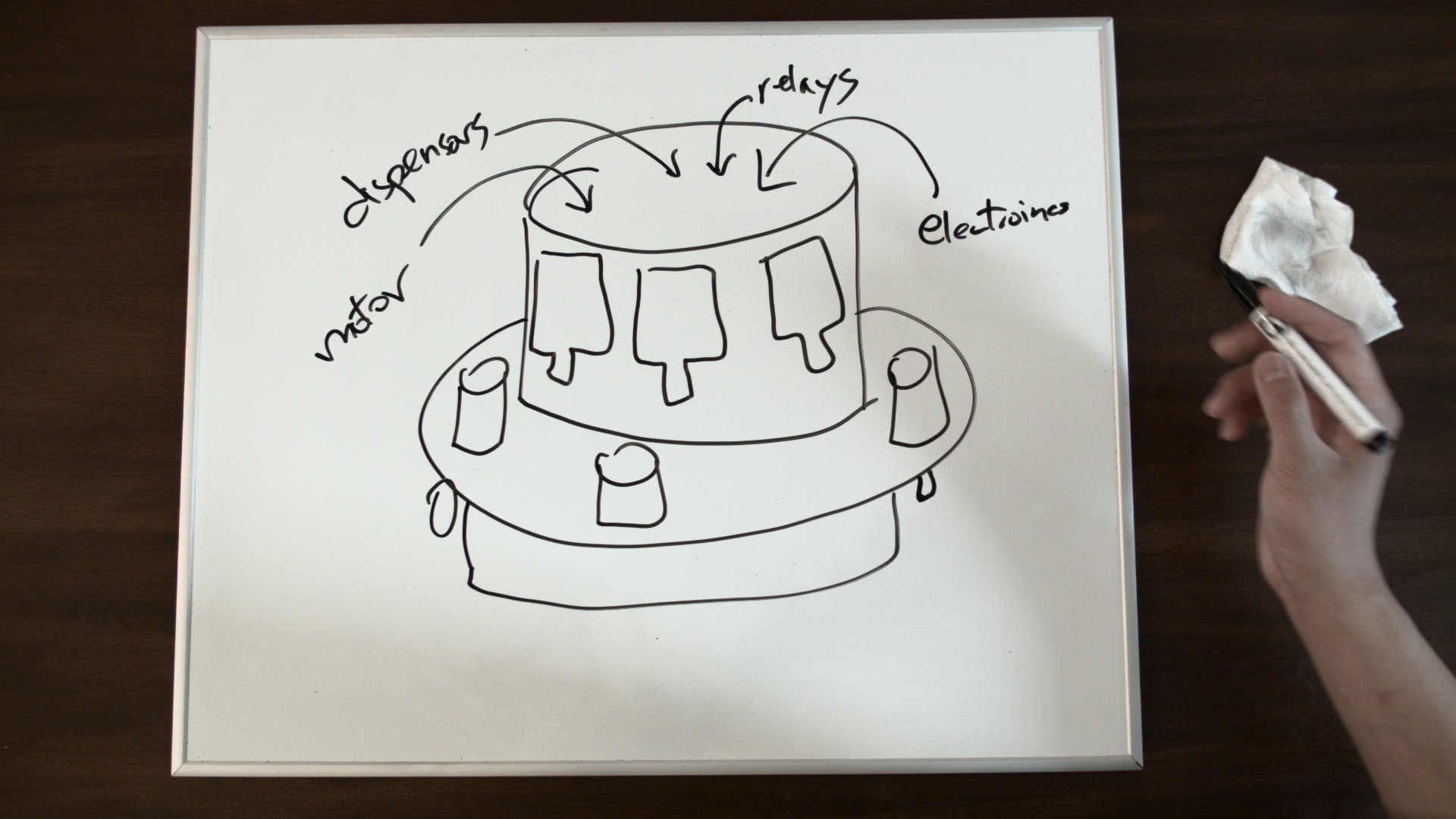
Part 1: https://youtu.be/x6QYNK6WI50 (Planning and Design)
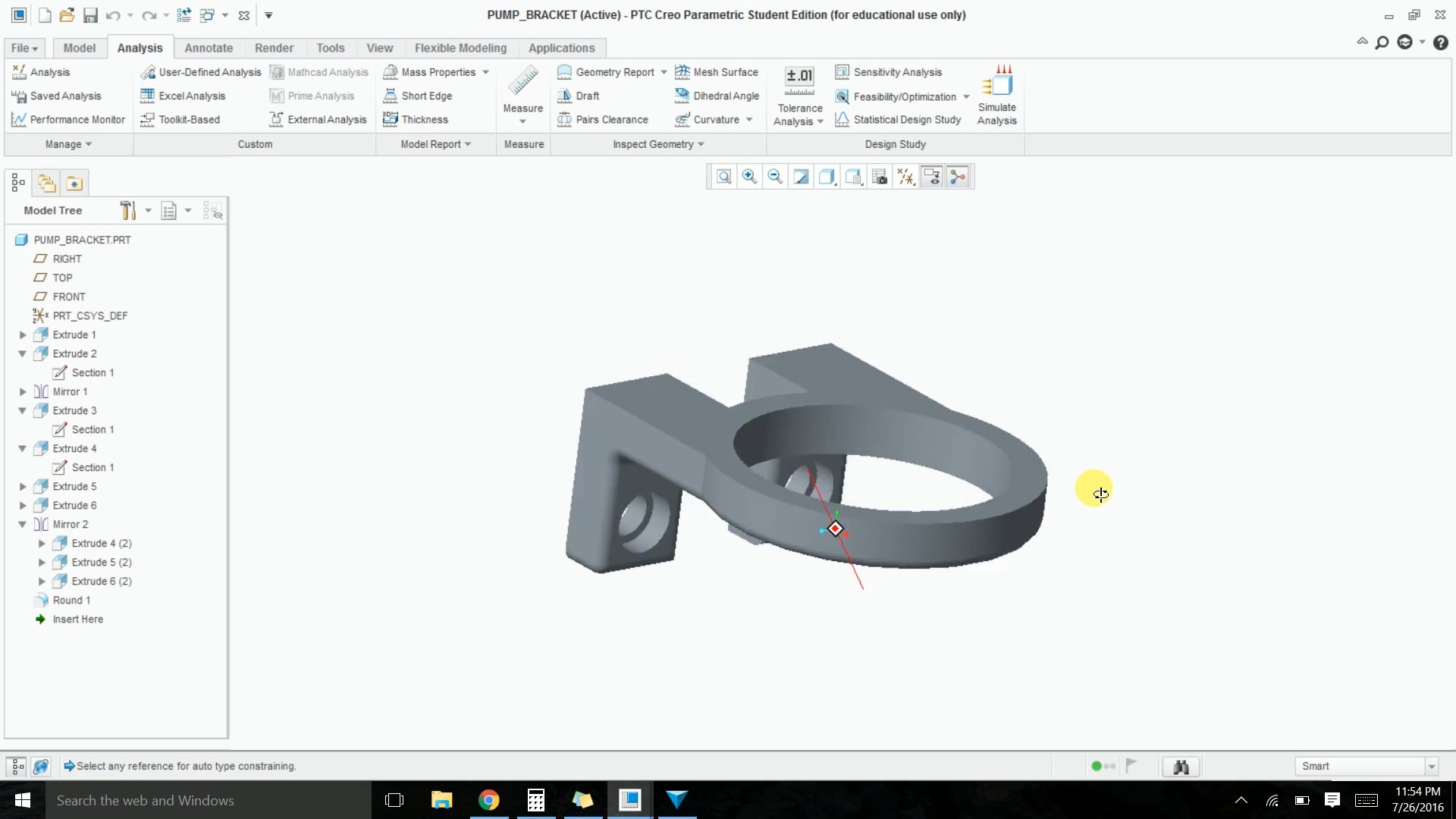
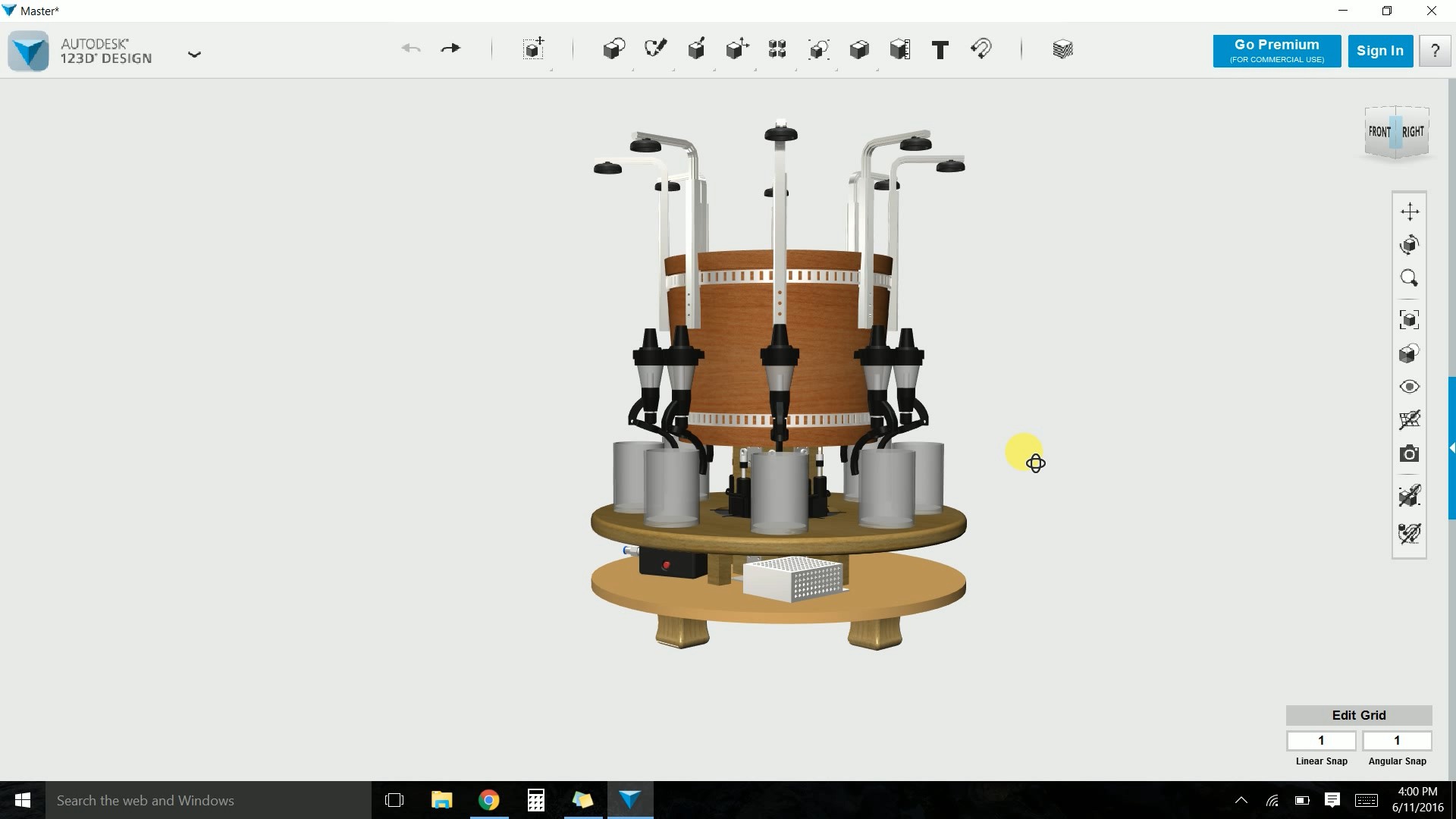
Part 2: https://youtu.be/orMLuXoaTSQ (Platform and Modeling)
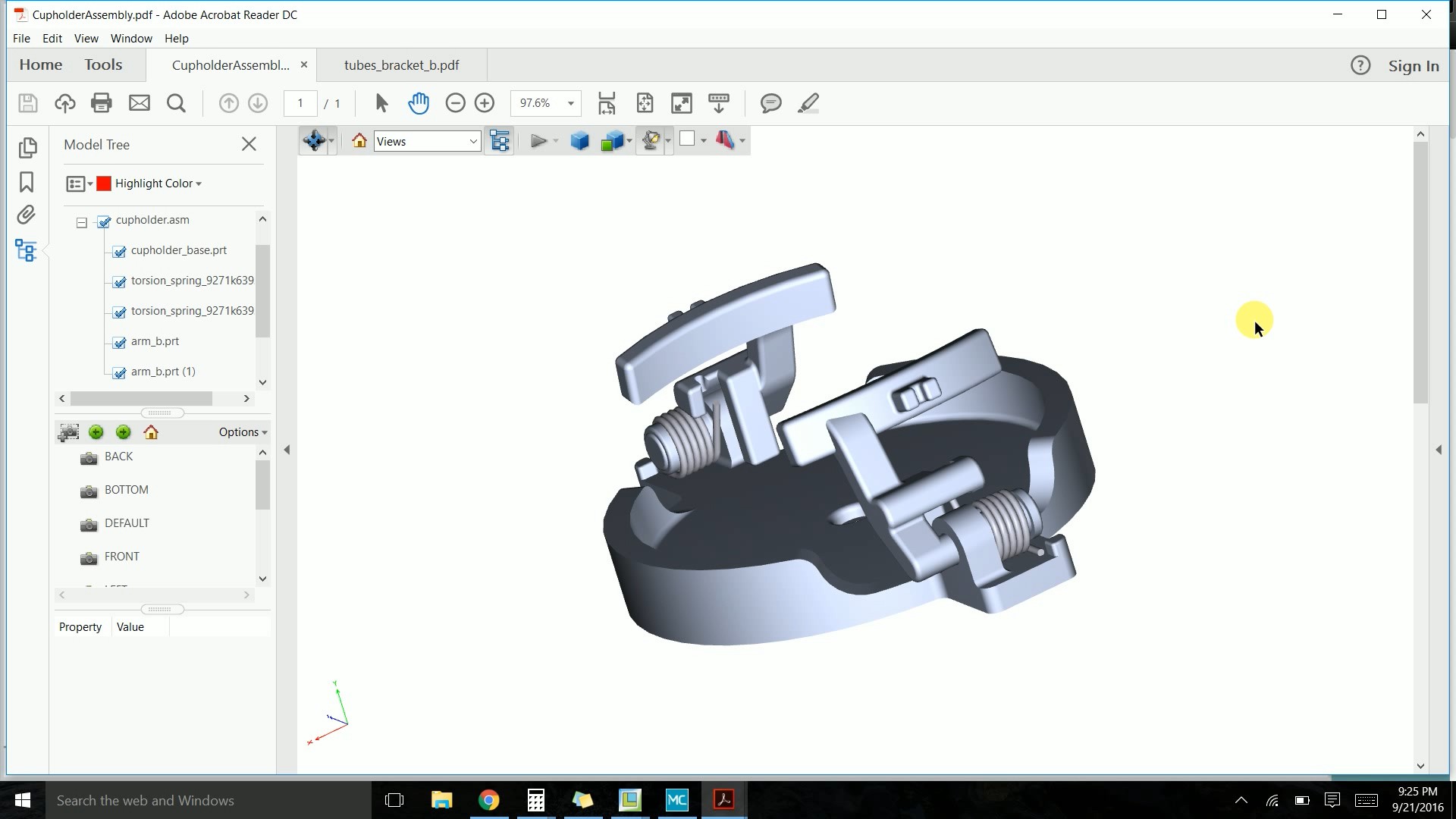
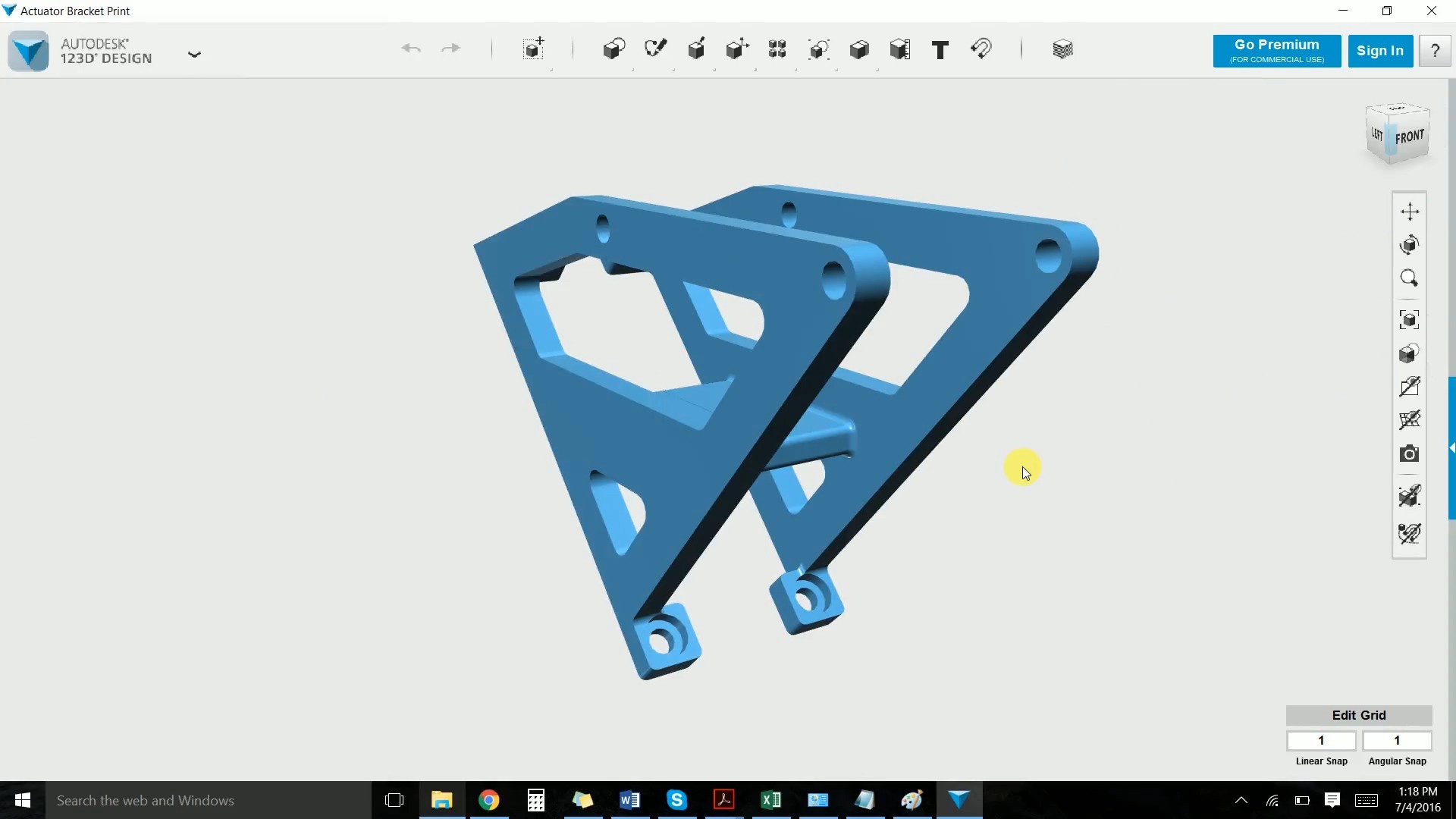
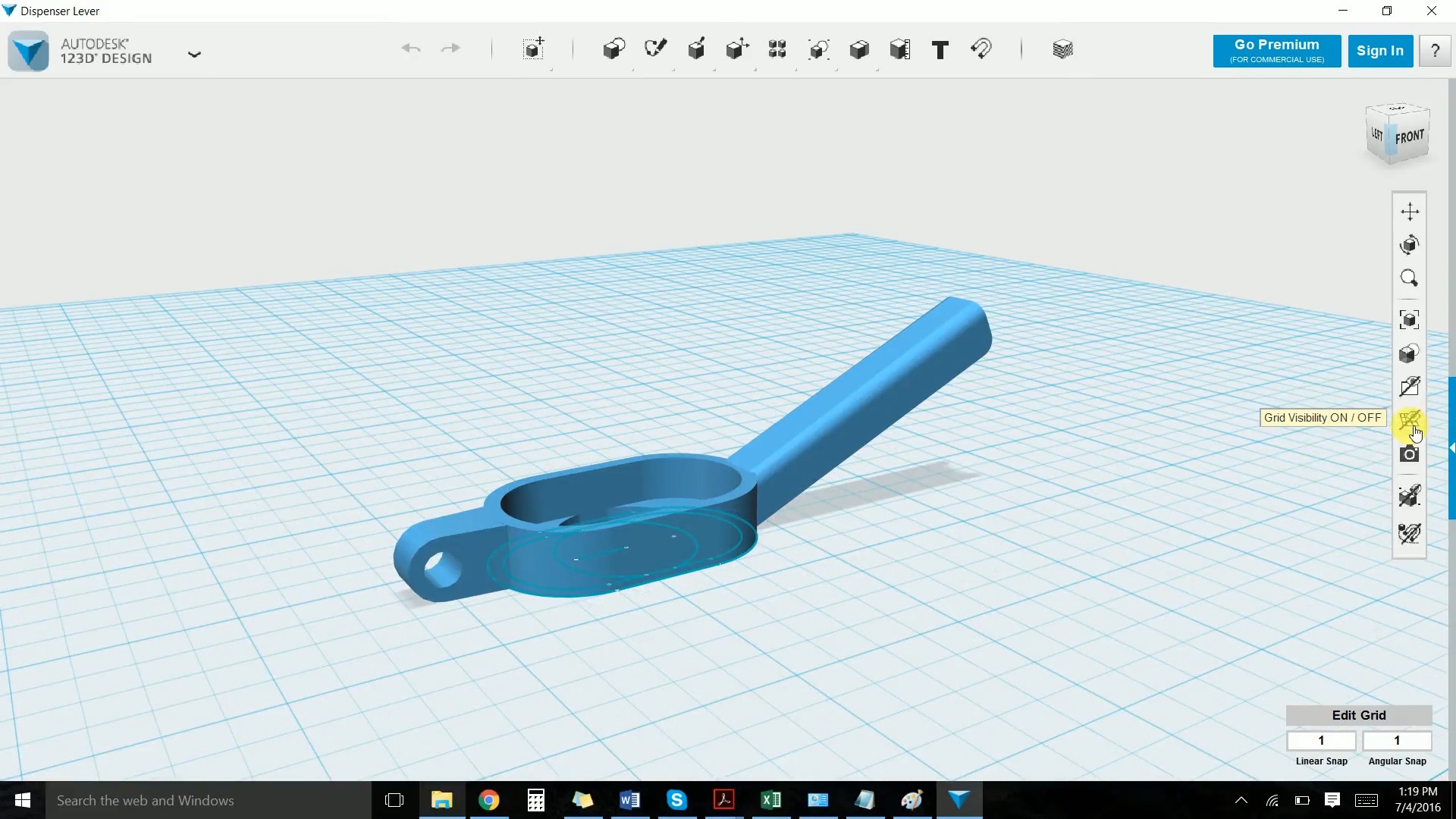
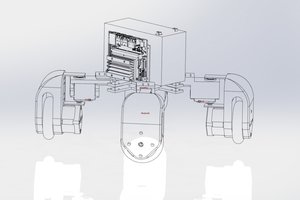
Part 3: https://youtu.be/IKZFf-zl0Bo (Frame and 3d Printed Parts)
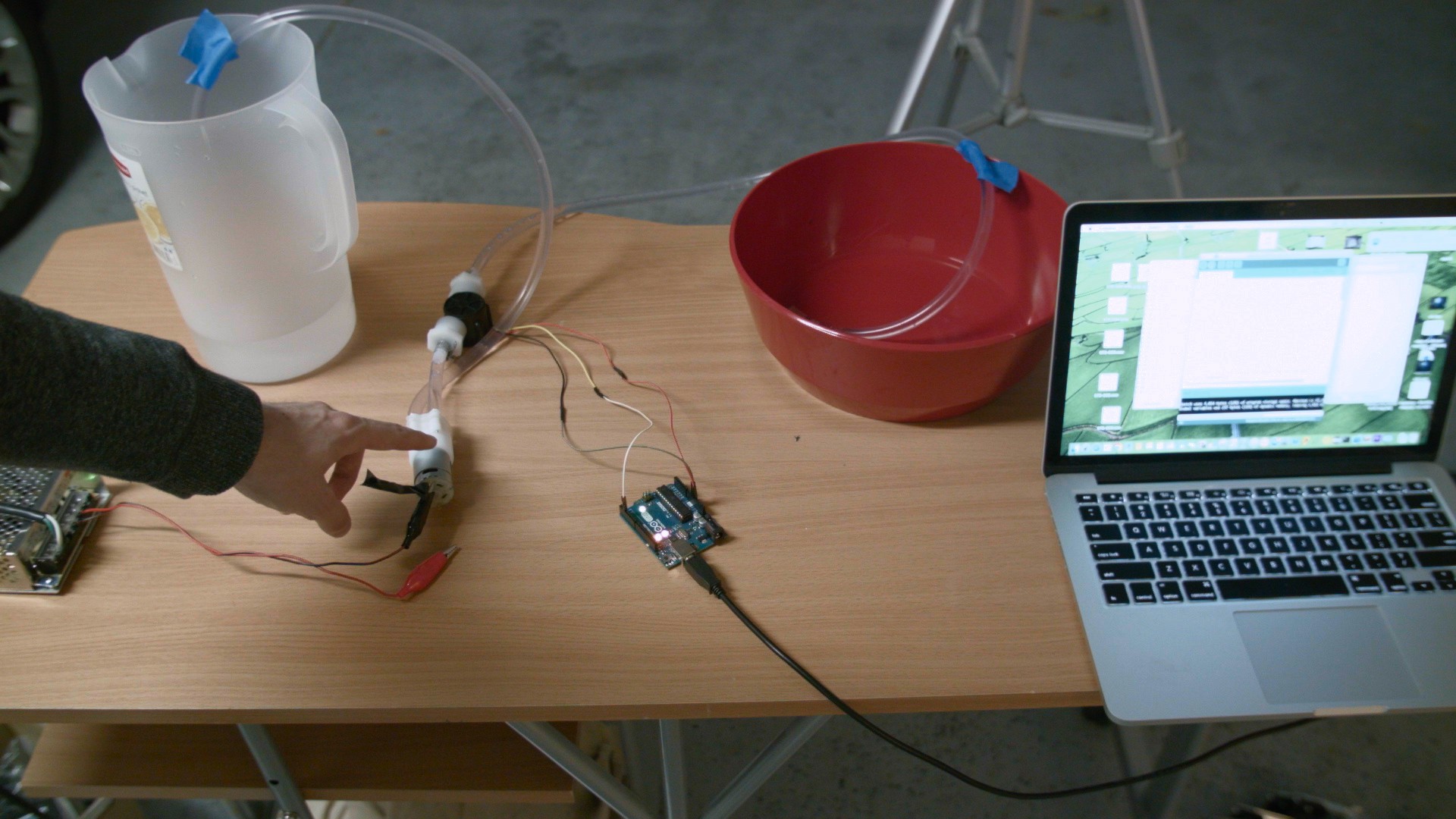
Part 4: https://youtu.be/aAgKmiabQy0 (Varnish and Flow Meters)
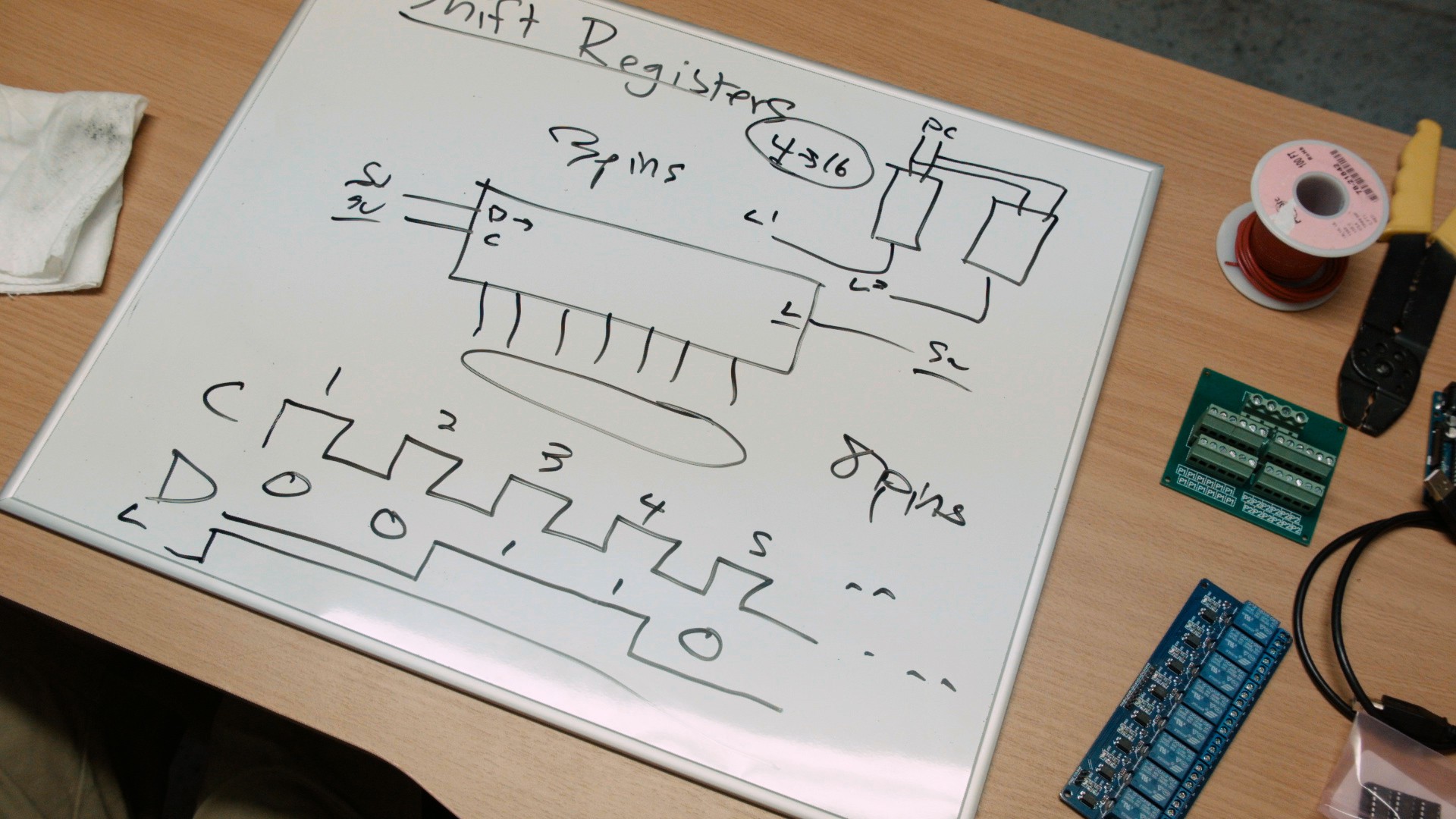
Part 5: https://youtu.be/SXW7ydvqfnM (Shift Registers and Initial Wiring)
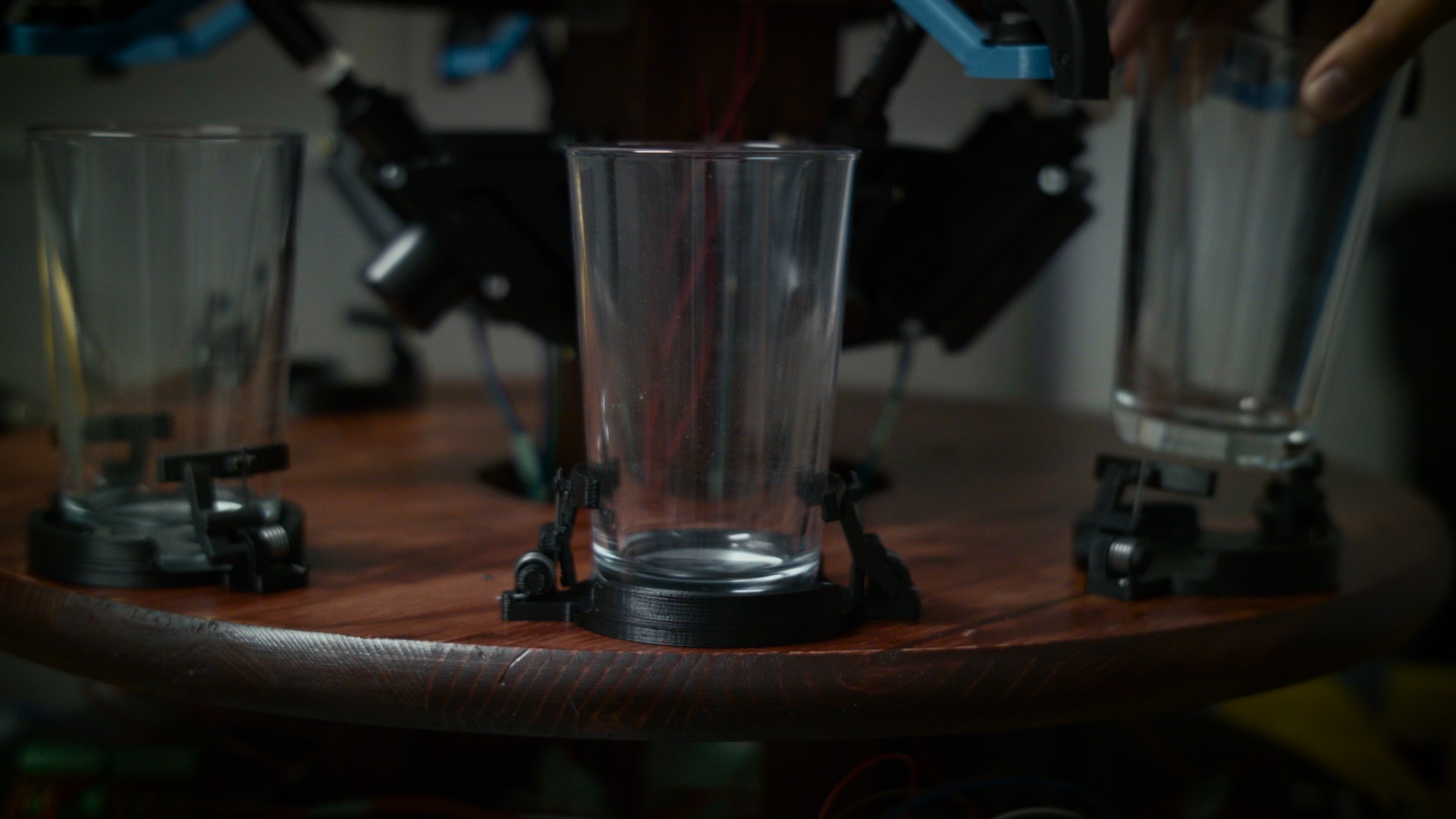
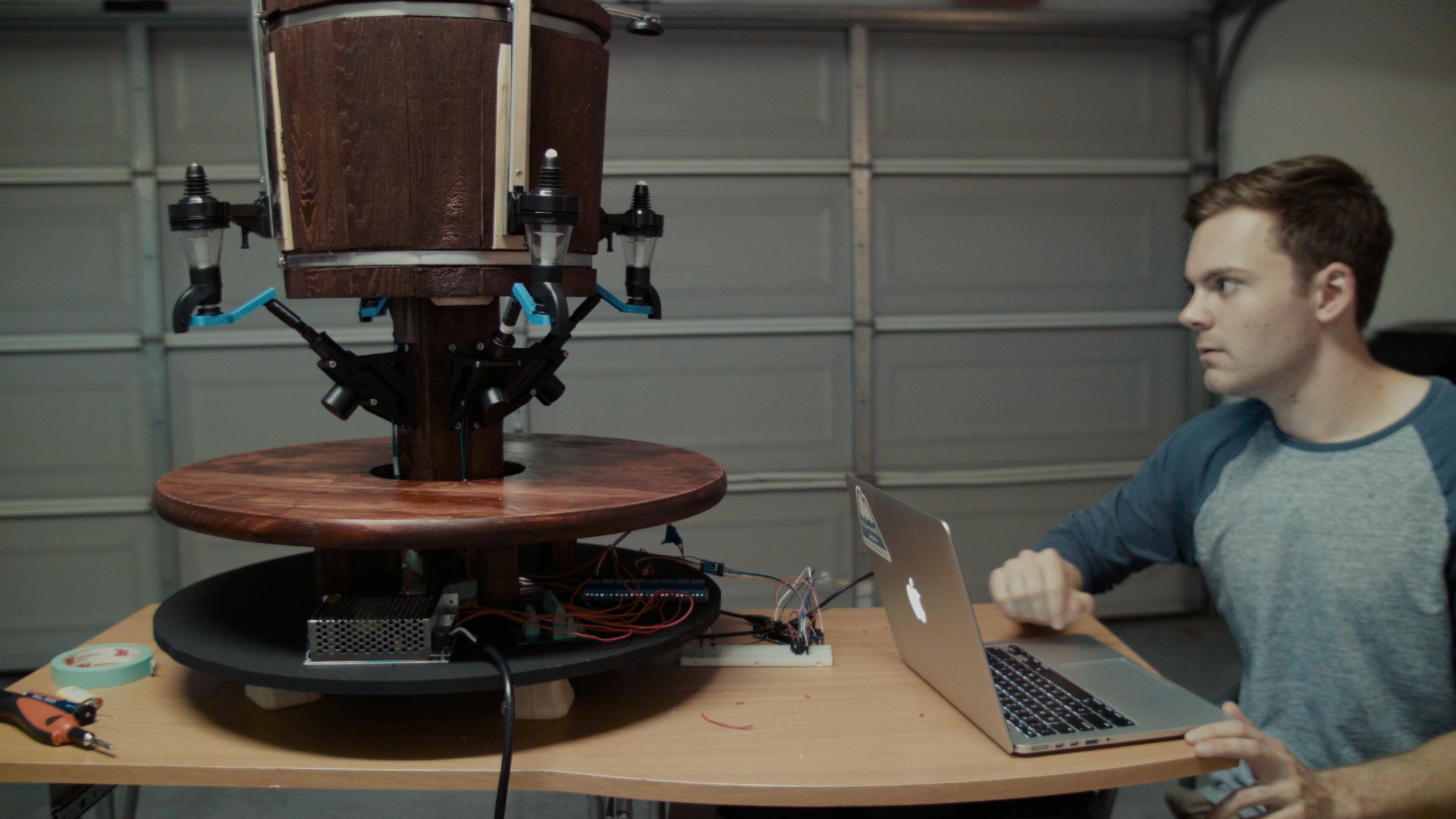
Part 6: https://youtu.be/-UzgQpltkWM (Drive Motor and Cupholders)
Part 7: Coming soon









 Daniel Resio
Daniel Resio
 Nick Rehm
Nick Rehm
 Tobias
Tobias
 Sam Baker
Sam Baker
You really did a great job to make this program object i want to embed it with my webpage can you see here https://vinylflooringsale.com/