Pierros Papadeas
Pierros Papadeas-
SatNOGS News – January 2017
01/23/2017 at 01:51 • 0 commentsSatNOGS community has been busy over the last couple of months, with many exciting updates on projects to share with you!
![satnogsrot31]()
Rotator v3.1
First and foremost, the 3.1 version of the SatNOGS rotator is soon to be finalized. If you are already working with a v3 keep in mind that upgrading to 3.1 is pretty straightforward, on the meantime feel free to share your build progress or finished ground stations with our community We got have some stickers to send to SatNOGS ground station operators. We really hope that lot’s of people get to install their own v3.1 rotator and hook up to the SatNOGS network, and we are working on a way to get the v3.1 rotator design to as many people as possible.
![]()
New UHF antenna
We published a new UHF 8 turn helical antenna design. Documentation and step-by-step build process is now public so everyone interested can build one on their own, using readily available tools and materials.
![]()
Updates on SatNOGS DB
Our crowd-sourced satellite database, SatNOGS DB, is expanding and will soon be powering Csete’s gpredict through it’s API. In the meantime we deployed new functionality that allows SatNOGS DB to visualize telemetry data captured using the SatNOGS Network of ground stations.
Events
We really appreciate people participating in the SatNOGS project, either in our community website, our IRC/Matrix chatroom, the SatNOGS Wiki, populating the SatNOGS database and our source code repositories but we also enjoy meeting people interested in SatNOGS in person.
![linuxconfau]() Last week on Linux.conf.au taking place in Hobart,Australia, Scott Bragg’s gave a great talk titled “Decoding Satellites With SatNOGS“. It was a great overview of the SatNOGS project and the ways you can get involved.
Last week on Linux.conf.au taking place in Hobart,Australia, Scott Bragg’s gave a great talk titled “Decoding Satellites With SatNOGS“. It was a great overview of the SatNOGS project and the ways you can get involved.![shrAijm8_400x400]() Since
most of the core SatNOGS team lives in Europe most of us will attend
FOSDEM in Brussels,Belgium this February. There Manolis Surligas is
giving a talk “SDR for Space the Open Way” focusing on the Software Defined Radio RF frontend and the GNU Radio module operating it and will be introduced in the coming versions of the SatNOGS client.
Since
most of the core SatNOGS team lives in Europe most of us will attend
FOSDEM in Brussels,Belgium this February. There Manolis Surligas is
giving a talk “SDR for Space the Open Way” focusing on the Software Defined Radio RF frontend and the GNU Radio module operating it and will be introduced in the coming versions of the SatNOGS client.Stay tuned for more detailed updates, and as always … keep hunting satellites!
log is copied by SatNOGS main project website
-
SatNOGS DB, the open satellite transmitter database opens for contributions
07/23/2015 at 00:55 • 0 commentsEarly on, while developing SatNOGS, the SatNOGS team encountered the lack of a central and editable database for active satellite transmitters. Such information would be vital not only for SatNOGS operations but also for amateur radio operators interested in satellite telecommunications.
Over the past many years, lots of radio amateurs undertook the challenge by creating personal pages that would keep track of transmitter data, and although there are really fine examples of such efforts (props to PE0SAT, JE9PEL, OZ9AEC, AMSAT-UK and others) those are unfortunately not scalable approaches, that could easily become deprecated and are not easily exported for further usage.
Our solution was to create SatNOGS DB an open satellite transmitter database, that allows everyone to suggest transmitter information of active satellites and collaborate in keeping the database up-to date. SatNOGS DB information is freely and openly (CC-BY-SA) accessible via an API and a web application, to facilitate the needs of satellite radio operators across the globe.
![satnogs-db]()
Technically our current implementation is based on the Django Python framework. The code can be found here and we are looking for code contributors as always! Do you have any suggestions on how we can make SatNOGS DB better? File away issues here, so we can make DB better for everyone.
If you are a satellite operator, or an amateur radio enthusiast and would like to make suggestions on populating SatNOGS DB don’t hesitate to check out our FAQ on how to do so.
![satnogs db]()
The more transmitter information we have, the easier it is to communicate with many more satellites. So get those contributions started, and together let’s create the holistic, open and crowd-sourced satellite transmitter database once and for all!
-
Introducing the Summer Of Code In Space 2015 student working on SatNOGS
06/03/2015 at 01:52 • 0 comments![42_digital_logo_dark_blue_sign_A]() As posted a few months ago SatNOGS is participating as a mentor organization in European Space Agency's Summer Of Code In Space 2015, during the call for proposals we received numerous interesting proposals to work on SatNOGS during summer as part of the Summer Of Code In Space initiative, from these proposals and with the consultation of the ESA SOCIS managers we choose Emilio Martínez's proposal working on "a pre-amplifier with an integrated antenna polarization switch for cross YAGI-UDA UHF band antenna, and a U/V diplexer module for the SatNOGS ground station". Emilio provided a highly detailed proposal for his work in SatNOGS and we are really excited to work with him during summer and beyond to the development of SatNOGS.
As posted a few months ago SatNOGS is participating as a mentor organization in European Space Agency's Summer Of Code In Space 2015, during the call for proposals we received numerous interesting proposals to work on SatNOGS during summer as part of the Summer Of Code In Space initiative, from these proposals and with the consultation of the ESA SOCIS managers we choose Emilio Martínez's proposal working on "a pre-amplifier with an integrated antenna polarization switch for cross YAGI-UDA UHF band antenna, and a U/V diplexer module for the SatNOGS ground station". Emilio provided a highly detailed proposal for his work in SatNOGS and we are really excited to work with him during summer and beyond to the development of SatNOGS.![Emilio]() Emilio Martínez is a Spanish Telecommunication Engineering (MSc) student at
Emilio Martínez is a Spanish Telecommunication Engineering (MSc) student at
University of Granada. He defines himself as an enthusiast of space-related technology and he would like to focus his professional career on the space industry when he finishes his studies.He is enrolled in an aerospace developing group at University of Granada called GranaSAT. This group isformed by students and professors with the goal of designing and developing a Cubesat mission. Currently, Emilio is developing his master's thesis about the Communications System of the Granasat Cubesat and the satellite-earth link: designing the Cubesat communication hardware, defining the link budget and improving their ground station capabilities in order to reach a reliable communication.
The SatNOGS team is looking forward for the expertise and know-how Emilio brings to our project.
We welcome all contributors that would like to be involved in the SatNOGS project and we would like to encourage all parties interested in satellite communications to join our community of developers.
-
SatNOGS rotator tracking a high attitude balloon
05/13/2015 at 02:07 • 0 commentsSince the conception of the SatNOGS one of our design mantras was modularity, not only we believe that the SatNOGS stack should be able use a wide variety of components but also that components should be able to used in a wide variety of applications.
This Sunday May 1oth 2015 the SatNOGS team had the chance to test how versatile our SatNOGS rotator and control software was by tracking the Aeolus-2way High Attitude Balloon.
Tracking was made possible by receiving APRS data from the Aeolus-2way High Attitude Balloon and converting them using a specialized script as azimuth and elevation coordinates.
The Aeolus-2way is a high attitude balloon build by an awesome team of radio amateur high attitude balloon enthusiasts from Greece, and the help of several groups and organizations.
![IMG_0078]() Aeolus team preparing the Aeolus-2way payload
Aeolus team preparing the Aeolus-2way payload The balloon launched from the center of the Peloponisos peninsula of Greece in the city of Megalopolis at Plaka airstrip at around 11:10.
![IMG_0107]() Aeolus-2 way launch
Aeolus-2 way launch The SatNOGS team was positioned 35 km (~21.7 miles) West – NorthWest of the launch site on the Antenna park near the Ano Dolianna village of Mt Parnon. An inverter was used to power two laptops sever ham radio transceivers and our SatNOGS rotator and provide sufficient power for the team's needs
![IMG_0115]() SatNOGS rotator tracking Aeolus-2way
SatNOGS rotator tracking Aeolus-2way ![IMG_0114]() SatNOGS running on power provided by automotive inverter
SatNOGS running on power provided by automotive inverter The balloon began it's descent at 34.660 meters and it's payload was successfully retrieved.
We would like to congratulate and thank all parties involved in this high attitude balloon launch for the great team work and cooperation and especially the Aeolus team for their commitment.
-
SatNOGS selected to participate in European Space Agency’s 2015 Summer of Code In Space
03/10/2015 at 16:59 • 0 comments![42_digital_logo_dark_blue_sign_A]()
SatNOGS is proud to participate in ESA's Summer Of Code In Space 2015 as a mentoring organization.ESA's Summer Of Code In Space (also known as SOCIS) is an open source development program specifically for students run by the European Space Agency Under this program. ESA funds students to write space-related code for open source projects during the northern hemisphere's summer.
If you are eligible to participate in SOCIS and interested in contributing code to the SatNOGS project, you may start by visiting our SOCIS project ideas page witch contains a list of suggested projects. Students are welcome to provide their own ideas for projects in collaboration with the SatNOGS developer community. The major communication and coordination systems of the SatNOGS project are its community forum and its github repositories.
We encourage every party interested to visit the SOCIS website, and follow read the list of frequently asked questions.
-
SatNOGS in FOSDEM 2015 lightning talk video
03/10/2015 at 16:59 • 0 commentsAs promised in a previous post about our project in FOSDEM 2o15, videos from presentations and talks during FOSDEM 2015 are now available and we are happy to share the video of our lightning talk.
So, if you are interested for an introduction of the SatNOGS project don't hesitate to check out the video from our lightning talk in FOSDEM 2015.
-
New lab equipment
03/10/2015 at 16:57 • 0 commentsHaving access to an awesome 3D printer is certainly crucial for the SatNOGS project but the SatNOGS hardware is much more than 3D printed parts. To push the development of the ground station forward the core development team decided to acquire an oscilloscope, a programmable power supply and a Vector Network Analyzer
Following our ideal of sharing resources with the community, sharing it with the local hackerspace, we decided to install our instruments to it's lab and share them with anyone interested.
In the future we plan to include to our instruments among other things a frequency generator and a signal analyzer.
We consider having access to a complete electromechanical lab/workspace is crucial not only for SatNOGS but for any community driven open hardware initiative.
-
-
SatNOGS #1 in Athens, Greece
01/05/2015 at 15:47 • 0 comments10 days ago we deployed a SatNOGS v2 on top of hackerspace.gr in Athens, Greece. This is the first SatNOGS deployed on the field and we couldn't help but thinking that this is a huge milestone and brings great pride to the team!
![]()
(obviously the front cap is closed at the finished deployment)
The deployment was pretty straightforward, with one UHF helical antenna (our VHF is still up for matching) and no SatNOGS client controlling it (still under development for connection to Network). We simply controlled it with gPredict and Gqrx. POE for powering it up and minimal weather shielding (just some silicone on and around the bolts of the box)
We were able to track and record many different satellite passes and we encountered some software issues with our arduino homing code (see https://community.satnogs.org/t/arduino-problem-with-gpredict-and-rotctld/101/10 for details) which we hotfixed.
Congratulations to the whole SatNOGS team for the first deployment!
-
Observation Scheduler on Network
10/27/2014 at 21:57 • 0 commentsAfter a nice code push, scheduling observation functionality is now complete in SatNOGS Network website. The website is now able to dynamically calculate and schedule observation windows given a satellite for all available Ground Stations. The functionality works like this:
The observer enters the New Observation page. After selecting a Satellite and associated Transponder desired, the observer selects the timeframe for the observation. The timeframe selection is constrained in the future with maximum width being 8 hours (this could change as we scale the Network). After hitting 'Calculate Observation' the system returns a proposed Timeline of the observation, that includes the Ground Stations to be used and their individual observational windows. For this calculation we use PyEphem library and input the Ground Station locations, Satellite TLE, and timeframe desired.
Once the proposed timeline is reviewed and/or modified the observer can schedule the observation by hitting 'Schedule Observation'. This creates the Observation in our database as planned, together with its associated individual observations for the Stations.
The Stations, through the Client, query the Network API frequently for scheduled individual observations.They then execute them on time, and push back the recorded data to Network, for further analysis by the Observers (making them also publicly available!)Optimization of the Scheduling functionality will be further pursued. Ideas like deduplication of overlapping (more than 50%) individual observations, and accounting for horizon constrains are already in the works, and will be evaluated (in terms of their efficiency) as the Network scales up.
Check our code here and a live dev website here.
(requires registration for testing the New Observation functionality. Feel free to abuse!)You can check a sceencast of the workflow in SatNOGS Network below:
-
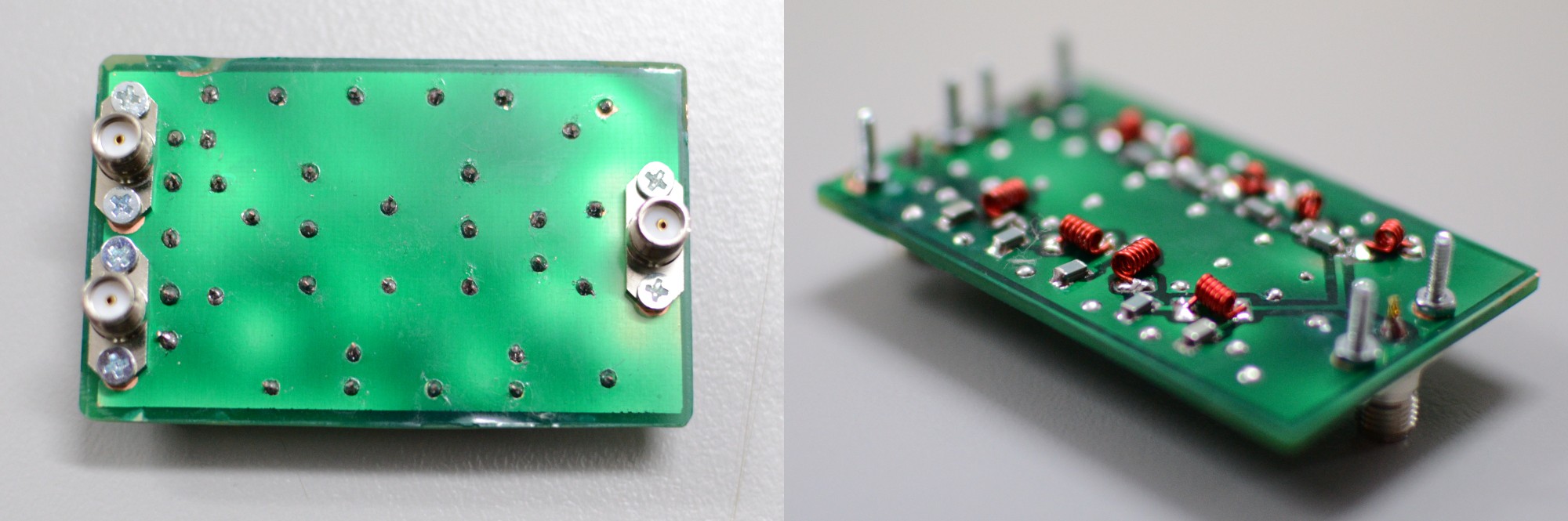
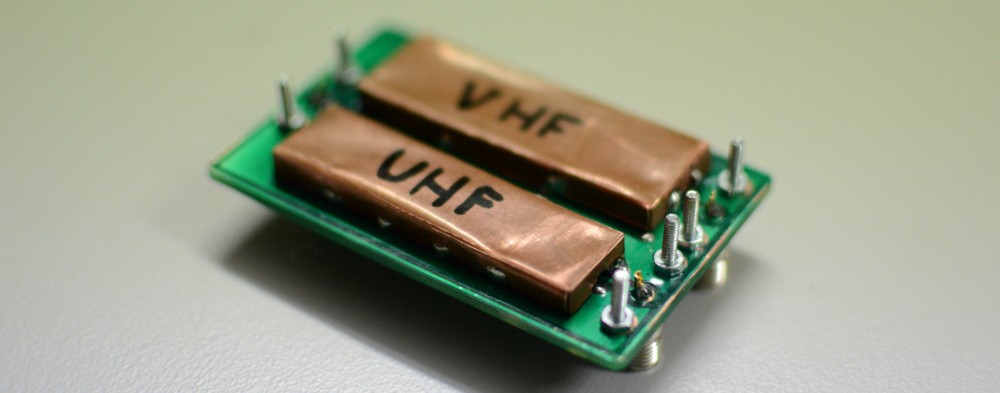
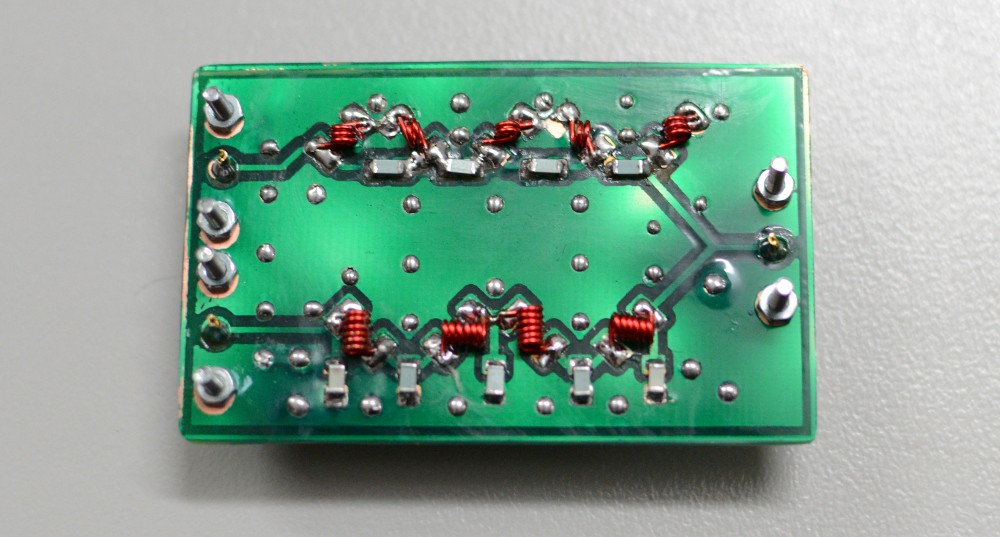
SatNOGS now equipped with Diplexer
10/27/2014 at 00:16 • 3 comments
SatNOGS - Global Network of Ground Stations
SatNOGS is an open source satellite ground station network, optimized for modularity, built using affordable tools and resources.