witchdoc
witchdoc-
Vote! Damnit
08/04/2014 at 19:39 • 0 commentsJust added a picture to get those chicks to vote for me.
-
Uploaded pictures
07/25/2014 at 20:03 • 2 commentsAs promised i uploaded the pictures that were used in the video. These pictures show the current prototype platform and a mockup screen layout for control of the robot.
The protype platform is build from Lego. It's a small six wheeled platform with four dc motors. Two motors on each side, all six wheels are driven. Some loose wires are visible on top of the platform, these connect to the motor inputs, these wires are wedged between the motor connectors and another lego brick. This way i din't need to break or alter any Lego parts. The motors will be controlled by one TLE 4202B motorcontroller per two motors. I chose these because i have a bunch of them from Pollin for just 50 eurocents each.
The other picture is a mockup of the screen layout for controlling the robot. Main feature in this layout is the use of a hexagonal grid. Hexagonal grids are often used in games and i believe they have some advantages over regular cubic grids. A lot of info about this can be found on Amit Patels website.
-
Video!
07/21/2014 at 01:28 • 1 commentSo, from what i understand i need to upload a video to increase my changes to stay in the game. Right ...
I had been preparing some stuff to upload to the blog but this video-thing is not my cup of tea. But i installed some tools, scrounged some materials and did my best. Stuff shown in the video will be uploaded here too.
I think the video is moving along to fast right now, i may have to some more editing. For a first time video editing i think it's allright though.
So, without any further adue;
-
The Brainz
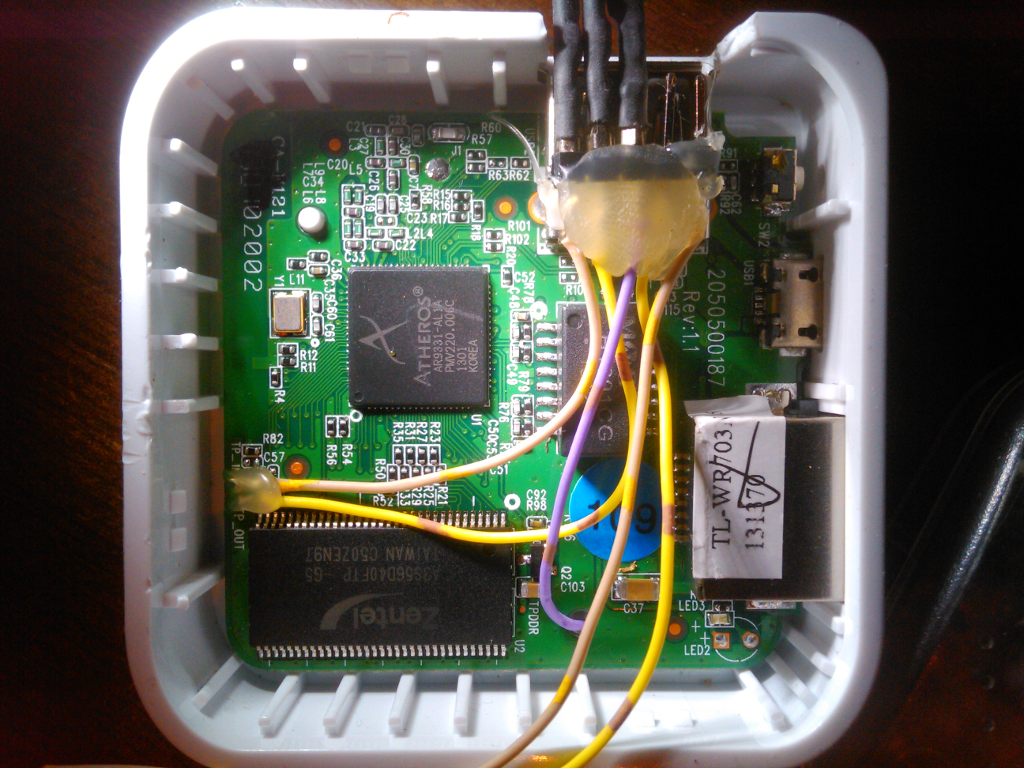
06/25/2014 at 22:37 • 1 commentRight. I recovered another bricked WR703N, this one looked intact but just wouldn't boot, it needed a console connection and once that was soldered on i could boot it into maintenance mode and flash a working image.
Below is a picture of the brains in its current state. I've added a five pin header of which rx/tx and gnd are now connected. Put the header on top of the USB host connector and broke part of the casing so it's accesible when the casing is closed. For now i'll leave the board in the casing, the pads on the board are pretty fragile and this way i don't have to worry too much about tearing them off.
The two extra pins are to be used for the I2C interface. I have yet to solder those to the board. Right now i'm compiling an openwrt image with i2c and python. Never compiled openwrt from scratch before, i'd like to have a booting, self compiled, openwrt before i start on the extra mods.
The I2C part should not be too difficult, i've got some proven I2C slave code for an atmega88 from a previous project. I'll clean up that code and put it on Github. As soon as i have control over a microcontroller from the router i'll start building a mobile platform. We recently acquired a shitload of Technic Lego at my local Hackerspace (Hack42) and i'm thinking i could use that to build a prototype vehicle for further development of modules and software.
![Debricked WR703N]()
-
Designing
06/14/2014 at 23:36 • 1 commentIn the last week or so i've been thinking on the design of the Daleklone. How to build it, what materials to use and so forth. I have modified the project picture with a rough layout of the robot's internals. My first priority is the base, a dust sucking robot isn't particularly usefull if it's incapable of moving around.
I've actually got three TP-Link routers, the WR703 type. All of them bricked in one way or the other. I brought the first one back to life, this one was missing the micro-usb connecter and thus could not be powered. It was an easy fix, i cut an old usb cable, soldered the power wires to the regulator and added some hot glue to keep it in place. I've designated this one as a bacup device. The other two routers are more seriously injured. Someone has tried to access the console port on one of them and severly damaged the TX trace on the board. I don't think i'll be able to restore that one. The last one just doesn't boot. I'll try to get ot back to life over the console. The next step is to get one of these thinsg connected to an atmega over i2c.
-
Planning
06/05/2014 at 19:55 • 0 commentsI just did a little reformatting on the text and added a component list. This is not actually a "components used" list but rather the stuff i think i need or already have.
What's next?
There's some nice blueprints on the net from a "Radio Times Special" magazine that was published back in 1973. Since these are for a full sized, some 1,5 meters tall, dalek i will use them as a reference only. I will determine the size of my dalek based on the parts i'm planning to use.
The size of the robot will determine the materials to use. I might be able to use the 3D printer, at least for the frame. With a low fill-in that will probably be lighter than a wooden frame. I need some guestimates about the weight before i can decide what motors to use.
Next i will have to figure out what i could use as tracks or how i could make tracks myself. I haven't decided yet wether to use tracks or wheels but i think tracks are better suited for scaling small obstacles like door sills and such. Of course these tracks, or wheels, should not be in plain view.
I'm toying around with to different ways of emptying the dustbucket. The first method i thought of was to create a hatch in the bottom of the robot and have the docking station lift the robot over a dustbin, so it just has to open it's hatch. Another, easier method might be to have a hatch on the back that slides away and use an old vacuum cleaner in the docking station that cleans out robot's innards.
I just realised that the 24 cm fan i listed with the components is way to big, the robot would have to be some 70 or 80 cm tall to fit that fan. I'm aiming for 40 to 50 cm max.