Elaine Cheung
Elaine Cheung-
Testing the Prototype
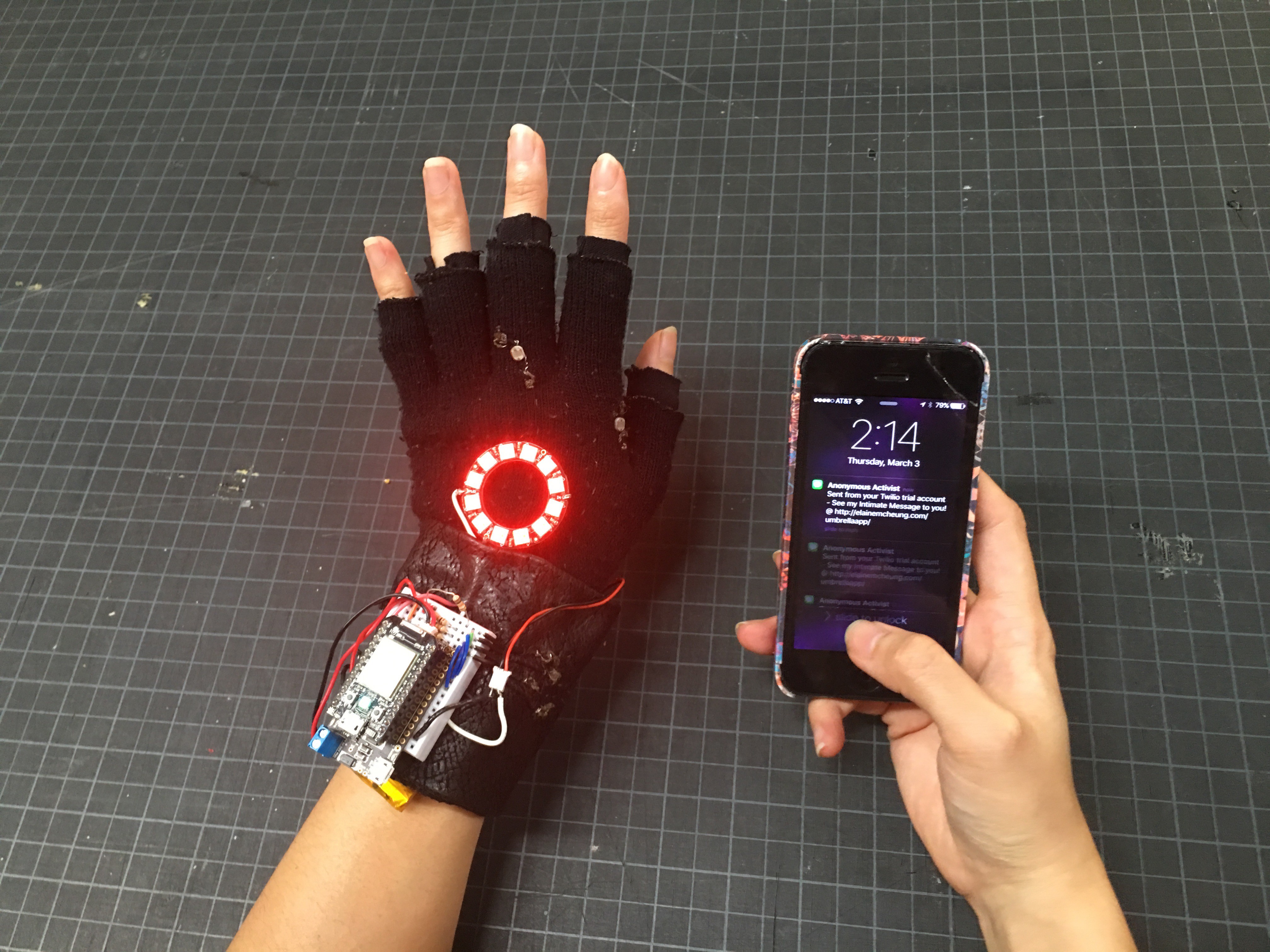
09/25/2016 at 20:12 • 0 commentsThe glove finally responses as the corresponding handshake is triggered activating the color as you can see below...
And messages are automatically parsed and sent to my phone!
-
You've Got Text!
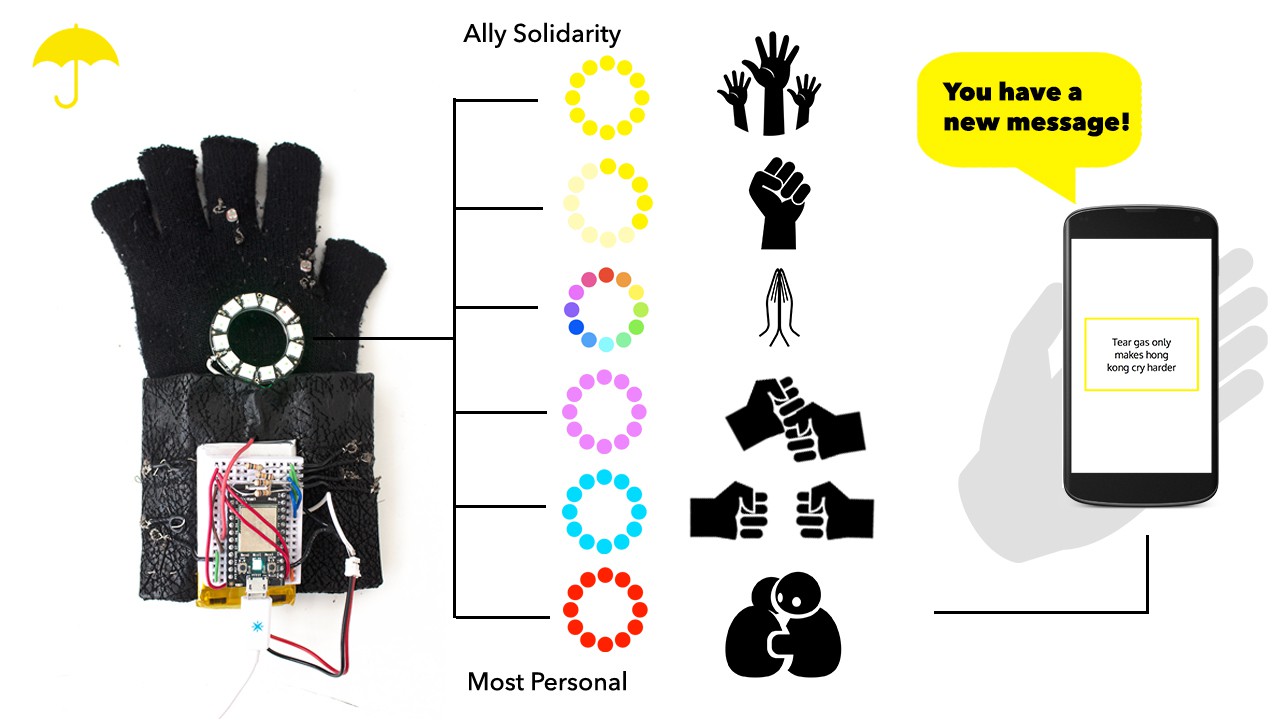
09/25/2016 at 19:53 • 0 comments![]()
Soon after mitigating the code into the Particle IDE, I set up a trial Twillo account to send text messages to my phone when a certain handshake is triggered. For this initial prototype, I created a website that held a database of various quotes that were organized by short sentiments of solidarity and support to longer and more personal kinds of messages - ideally exemplifying the moment when you understand or empathize with someone, you might tell them your story. Based on which handshake and gesture is triggered, the particular message (organized by casual-intimate level) is sent to my phone through Twillo.
![]() Assigning colors to each message was important here for the context of visibility, to be able to see what kind of message is received but not necessarily looking at your phone. It keeps in line with being able to talk silently but staying engaged with the other person. This kind of interaction encourages people to be thoughtful with the kinds of messages they want to send out, as it is preprogrammed beforehand.
Assigning colors to each message was important here for the context of visibility, to be able to see what kind of message is received but not necessarily looking at your phone. It keeps in line with being able to talk silently but staying engaged with the other person. This kind of interaction encourages people to be thoughtful with the kinds of messages they want to send out, as it is preprogrammed beforehand. In my context for the example situation, I used it as a DIY way to communicated in a protest or large crowd where talking might be hindered or difficult. But in such a case, solidarity, support and being an ally is important for visibility in such circumstances. The yellow "default" color glows brighter when a clasped gesture is formed (one representative of "resistance"). Imagine a sea of people holding this gesture in the air, can be a very powerful message broadcasted on a massive scale.
![]()
-
Circuit Diagram & Electronics
09/12/2016 at 19:15 • 0 comments![]()
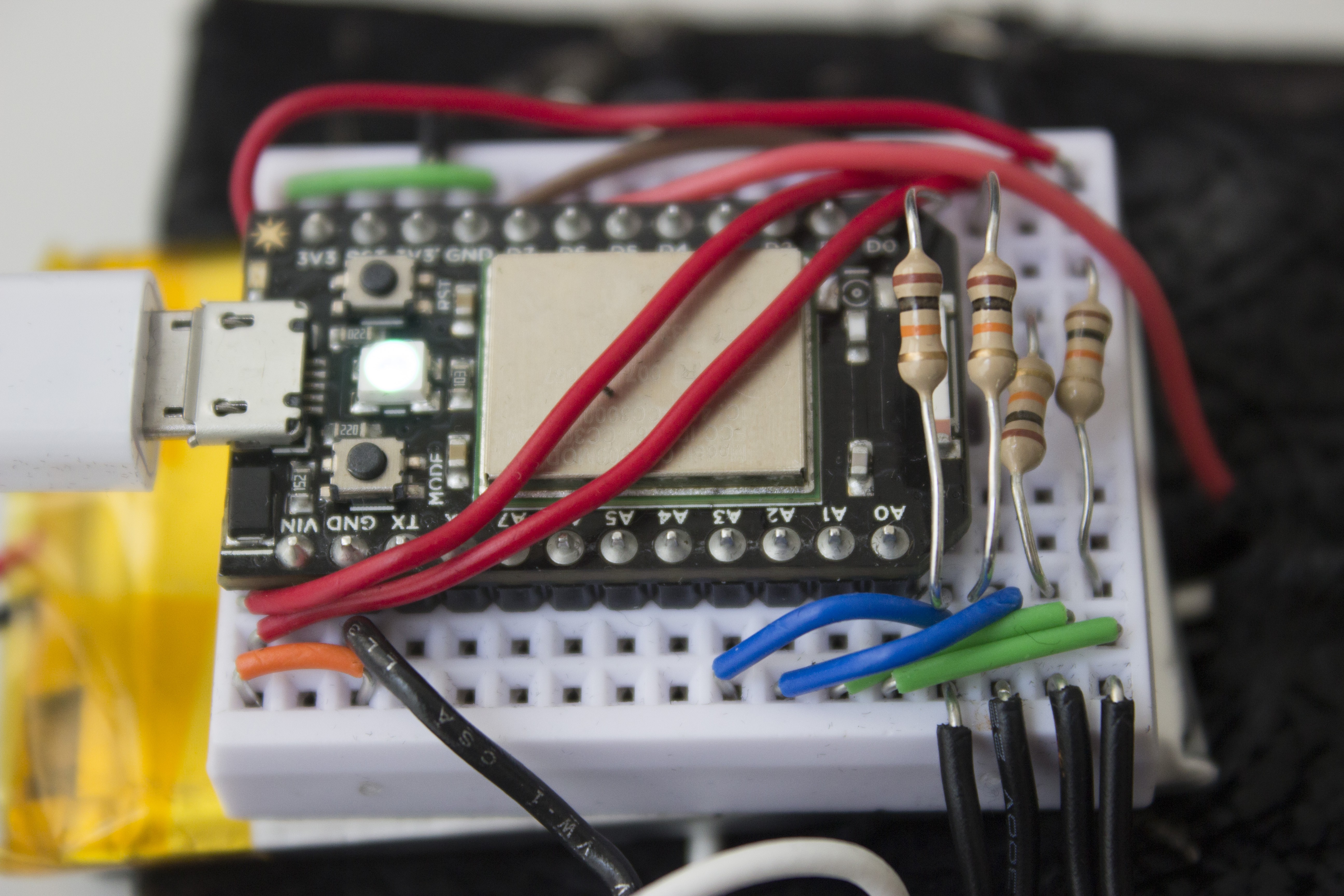
This is the setup I used from testing on the breadboard to sewing the components. It's best to test the whole setup on the breadboard first and label the photocells so you know which cell goes where on the hand. After making sure everything worked, I moved on to the soft circuits!
I placed the photocells on the outside of the glove (I used regular sensors but bent the leads/wires into a circular "o" loop on either side) and the wired circuit I had sewn with conductive thread. So basically we need all of the RED (positive) leads to connect to one source that goes to 3V3 or VIN and the GREEN to reach the resistors (analog).
Some things to note:- Make sure there's enough pull of the conductive thread when hand sewing (this is due to the knit fabric of the glove which has a lot of elastic - I made sure I wore the glove after sewing a few stitches)
- When you start with the conductive thread, make sure you loop the thread around the photocell wire for a stable connection
- Make sure the sewn circuits don't overlap! If they touch it will short circuit the connection!
- Best to insulate the wires (which I forgot to...) but I've used fabric/puffy paint to do this in the past
![]()
There are 4 snap on buttons which are the end points of the Analog side of the sensors. The Positive threading attaches to the button underneath these four (you can kind of see it at the top there). It's a large knot since there are 4 separate stitches overlapping to create one connection. And since its below the 4 analog buttons, I had to be careful not to have the thread touch any other threads. Quite tricky.
Once done with the glove, the breadboard and neopixel are assembled onto the extra fabric swatch, which will make a belt for my wrist. It is easier to keep all the components at the wrist because it lays more flat when making the rest of the hand is constantly moving around. Snap buttons are sewn onto the belt which will then be sewn towards the circuit. Since I'm still using a breadboard, the threads will have to connect to wires...
![]()
...like so. Voila, we have completed a half hard wired/half soft circuit! After making sure all the connections go where they are supposed to, it was time to test the electrical components to make sure they are all still working. Any simple AnalogInOutSerial will do or whatever the equivalent is in the particle.io console. Just make sure you can get the light readings from each of the sensor's ranges because they will be used to adjust your numbers in the code.
![]()
-
Jazz Hands
09/10/2016 at 19:06 • 0 commentsOur hand is a very versatile and dynamic tool for our body. We use it to interface with the world, a tool to touch our tangible surroundings. Over time it has evolved to take on other roles to communicate and pass on information. People often gesture to indicate something urgent or to invoke some pre-established meaning (awkward turtle, anyone?). Sign language, on the other hand, is used all over the world in deaf communities to converse. With the rise of interface technology, we have naturally developed gestures to touch screens (swipe, hold, press) and future technology designing with the hand in mind. But as the complexity of gesturing grows, we grow all to hesitant to interact and socialize with others - only at a distance perhaps. So I took it on to explore others ways of tactile interaction between each other.
Handshakes
The good ol' handshake. It can be a sign of encouragement, wishing of good luck, friendship or excitement. I really wanted to capture the spirit of joy that comes from interacting with others and the more contact, the more memorable an experience might be. Babes are said to need much physical contact in their early stages. As we get older we loose such intimate moments in our lives but imagine if we could design these sort of analogue moments into our technologies and interfaces? We've seen our texting and messaging become usurped by emojis and memes. We are finding more ways to express ourselves in the digital world, new combinations and mashups. It's interesting to note that most of this is very visual, involving little physical interaction and haptic response.
But what if we used handshakes to talk and interact? This may be particularly useful in situations where talking might be difficult or hindered. Having a glove that is able to read your gestures in particular pattern sequences can be measured through the data coming from the sensors on the glove. With IoT connected smart objects, this glove can ideally send or receive messages through the smartphone - opting to have the handshake become the vehicle of transfer. By inserting more human touch into our technology, it addresses a fundamental social handicap in our society. It smartly updates the "handshake" into the 21st century.![]()
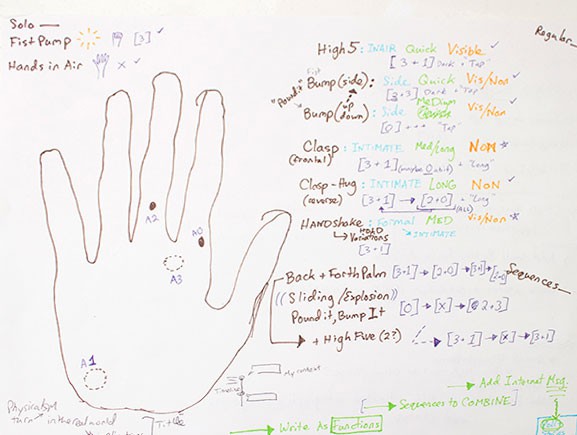
I drew out various hand formations that would be easily read by the photocell, focusing only on hand gestures for this prototype. Several positions were outlined (bottom of palm, center of palm, index and middle finger) that could be combined to pinpoint which hand positions were being held and in what sequence (say for a longer handshake). For example, based on the light, the position at the bottom of my palm might have more light than the one at the middle when I go up for a high five because the darkest area would have to be that palm to palm touch. Messages can be sent according to any number of custom combinations.
Next - building out the glove, getting it to talk through the cloud and programming. -
Sensors and Soft Circuits
09/10/2016 at 03:18 • 0 commentsTo begin processing and capturing gestures of the hand - bending the fingers, palms touching, and interlacing fingers - these motions would have to be captured by sensor data. There are systems like the Microsoft Kinect or various infrared that can probably track what hand position you have, but to create a wearable that is fully functioning on its own must rely on other types of sensing. And for accessibility, hardware sensors are cheap and readily available.
What sensors should I use?
A number of sensors could work such as tilt sensors, photocells, or capacitive touch fabric. I tested out several sensors and set ups before deciding to create the first prototype using photocells. But try various combinations of sensors! What gestures can be identified when using both photocell and reading which finger is bent? (A thumbs up? Or perhaps a (half) heart shape...)![]()
Soft Circuits
I decided to implement a lot of the design using the natural contours of the glove (in this case I used a woven knit glove that had a lot of stretch). Other projects tend to use 3D printing to encase the hand while other gloves, like The Mimu Gloves, create a complete circuit glove from scratch - sewing and assembling both the machine sewn circuit and glove pieces in the final steps. For the purpose of my design, I have chosen to use easily found materials around the house so that this setup can be recreated easily and is the most accessible. Sewing the circuit into a glove is lighter in weight and also allows for more flexibility when creating gestures and movements with the hand.
Heart to Heart
Heart to Heart is a glove that sends messages through various handshakes and gestures enabling you to "talk" without speaking
 Assigning colors to each message was important here for the context of visibility, to be able to see what kind of message is received but not necessarily looking at your phone. It keeps in line with being able to talk silently but staying engaged with the other person. This kind of interaction encourages people to be thoughtful with the kinds of messages they want to send out, as it is preprogrammed beforehand.
Assigning colors to each message was important here for the context of visibility, to be able to see what kind of message is received but not necessarily looking at your phone. It keeps in line with being able to talk silently but staying engaged with the other person. This kind of interaction encourages people to be thoughtful with the kinds of messages they want to send out, as it is preprogrammed beforehand.