0%
0%
Rocket Receiver Teardown
Teardown of the "Beckett Rocket" fuel level sensor receiver.
 jlbrian7
jlbrian7Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
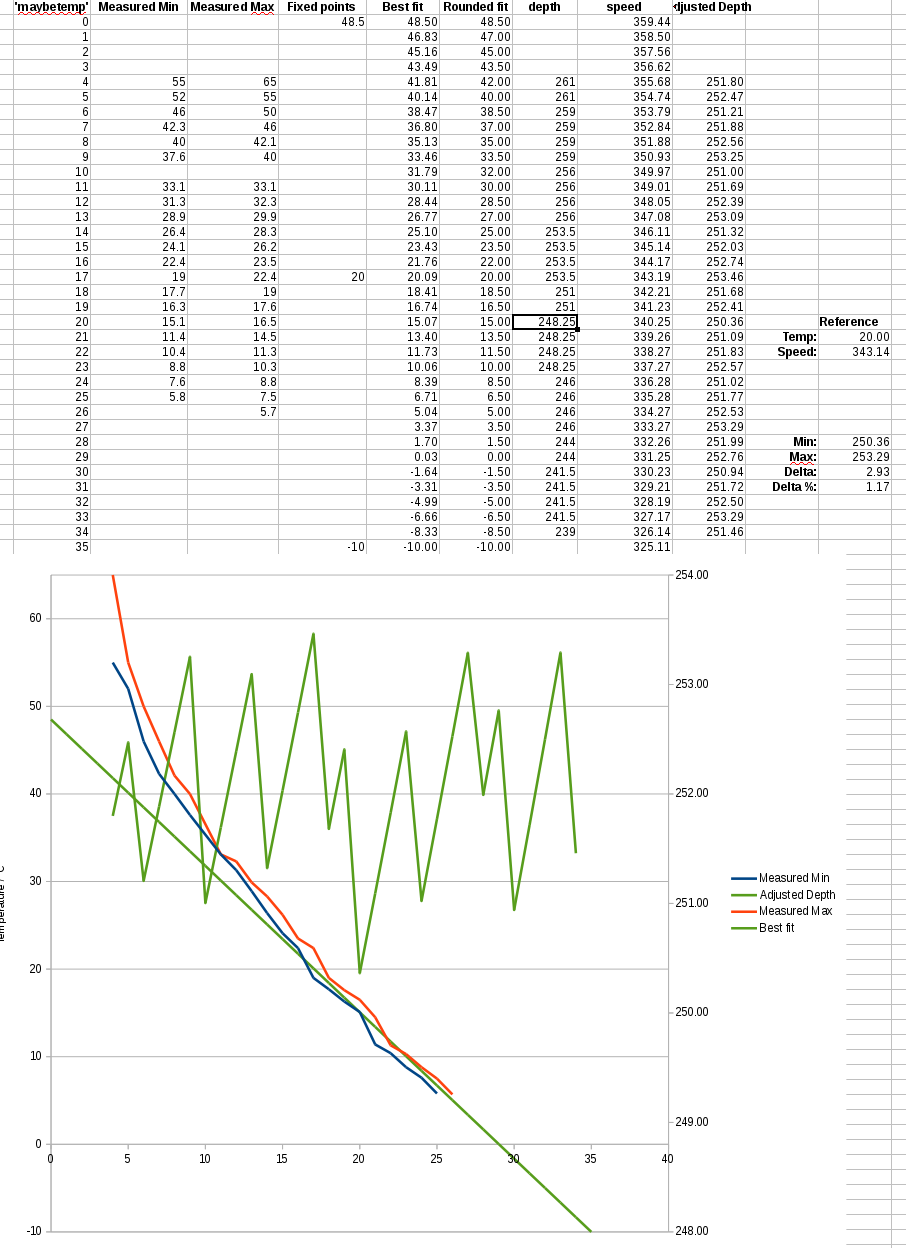
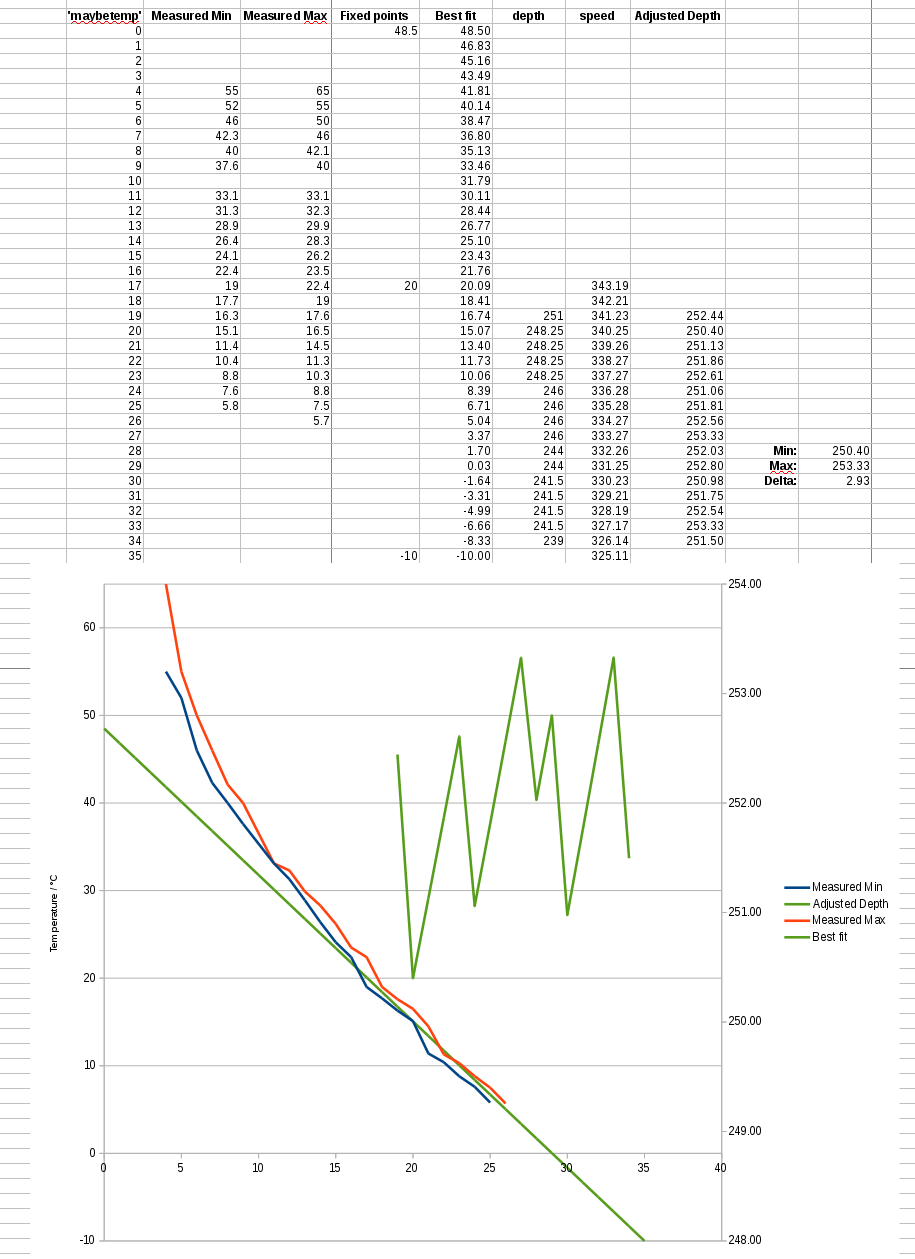
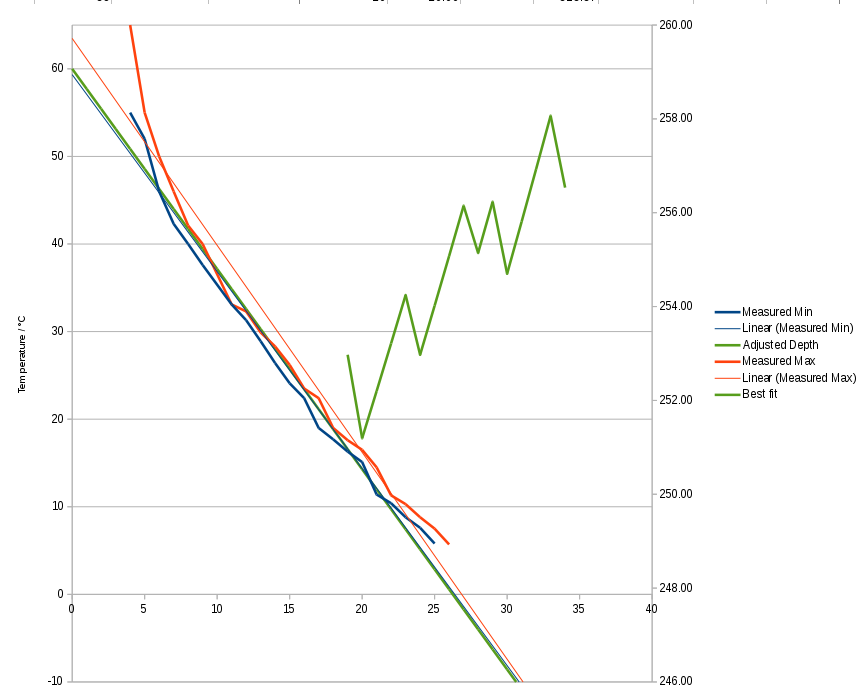
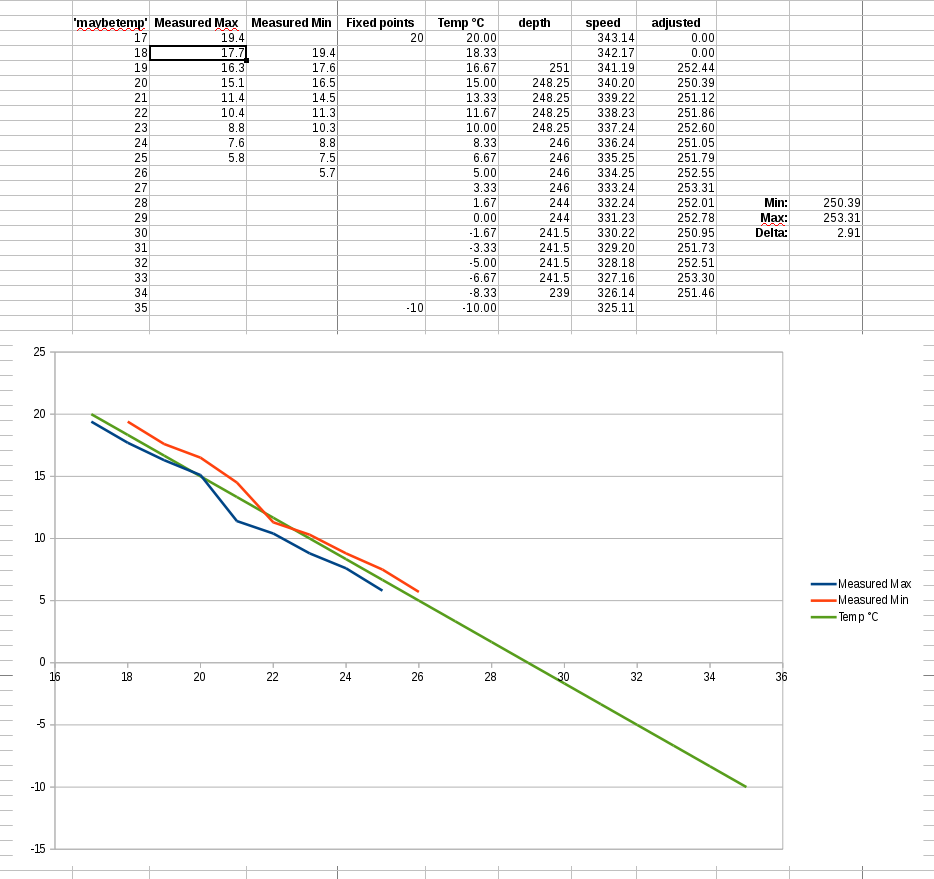 Using the results of the second experiment, a chart was plotted to illustrate an estimate of the meanings of the temperature values. A good fit is achieved by assuming that 35 indicates -10°C, which is the lowest rated temperature of the system, and 17 indicates 20°C.
Using the results of the second experiment, a chart was plotted to illustrate an estimate of the meanings of the temperature values. A good fit is achieved by assuming that 35 indicates -10°C, which is the lowest rated temperature of the system, and 17 indicates 20°C.
 Or 0x28 0xc6 0xd6 0x1d 0x81 0x40 0x51 0x83. The first byte is always 0x28 and might be part of the framing or packet identification. The final byte is a 1Wire CRC. We'll get to the rest later.
Or 0x28 0xc6 0xd6 0x1d 0x81 0x40 0x51 0x83. The first byte is always 0x28 and might be part of the framing or packet identification. The final byte is a 1Wire CRC. We'll get to the rest later.






 Simon
Simon
 Thomas Baum
Thomas Baum
 Russell Mullins
Russell Mullins
 Tim Rightnour
Tim Rightnour
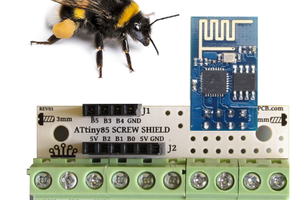
This is really interesting. I have an Apollo Ultrasonic from around 2006 before Silicon Labs bought Integration associates in 2008, so the receiver chip is the IA4320. This appears to be identical to the sl4320.
However the preamble is the default for the chip (0xAA) and the bytes sent is half of the size described here. So oil_watchman.c cannot decode it.
Pics attached.
Any advice about where to start from here to get this working in rtl_433 appreciated!