Bart//Bratke
Bart//Bratke-
PROJECT TEASER
05/21/2018 at 17:22 • 0 comments -
UNIT ACTUATION
05/21/2018 at 15:02 • 0 comments![]()
![]()
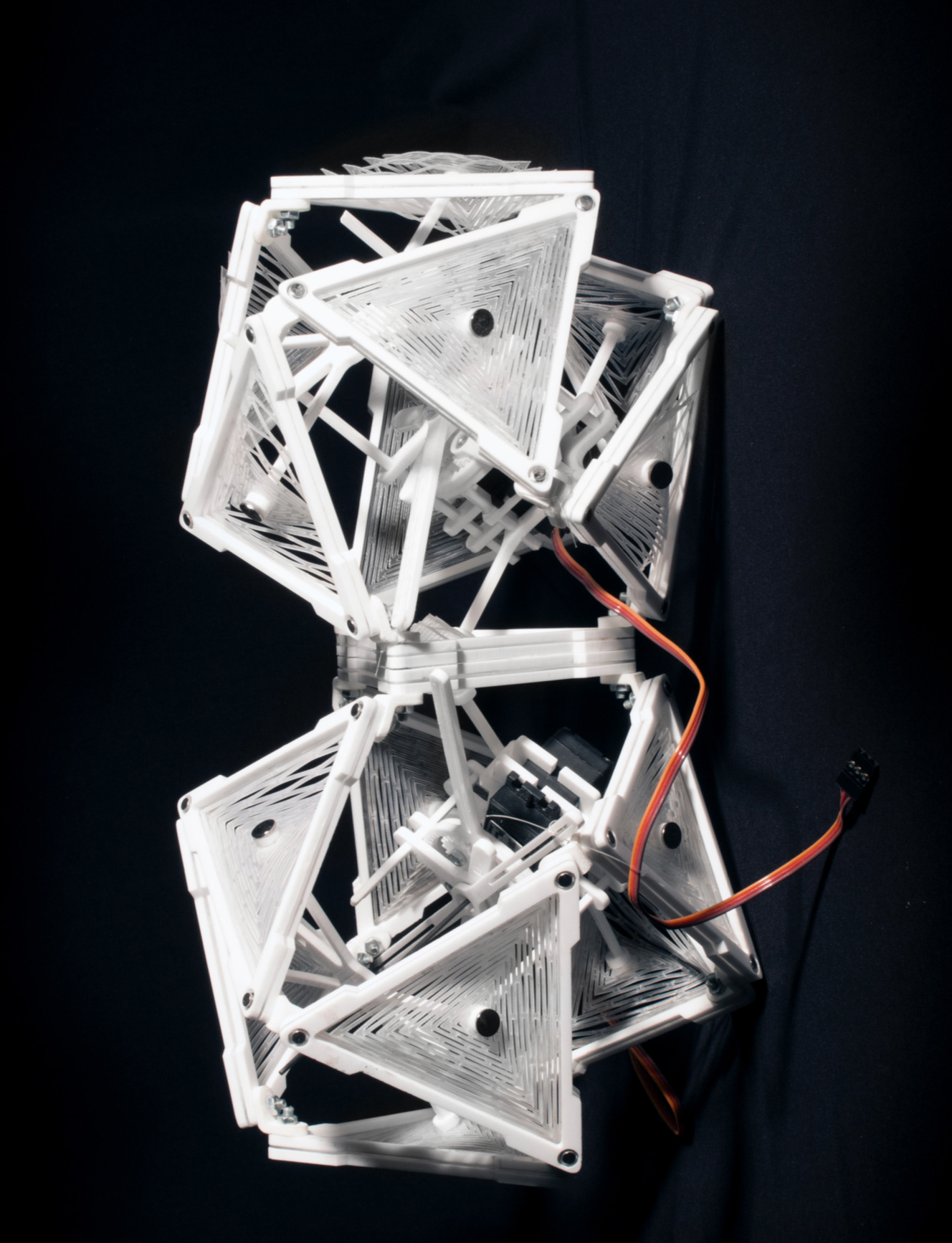
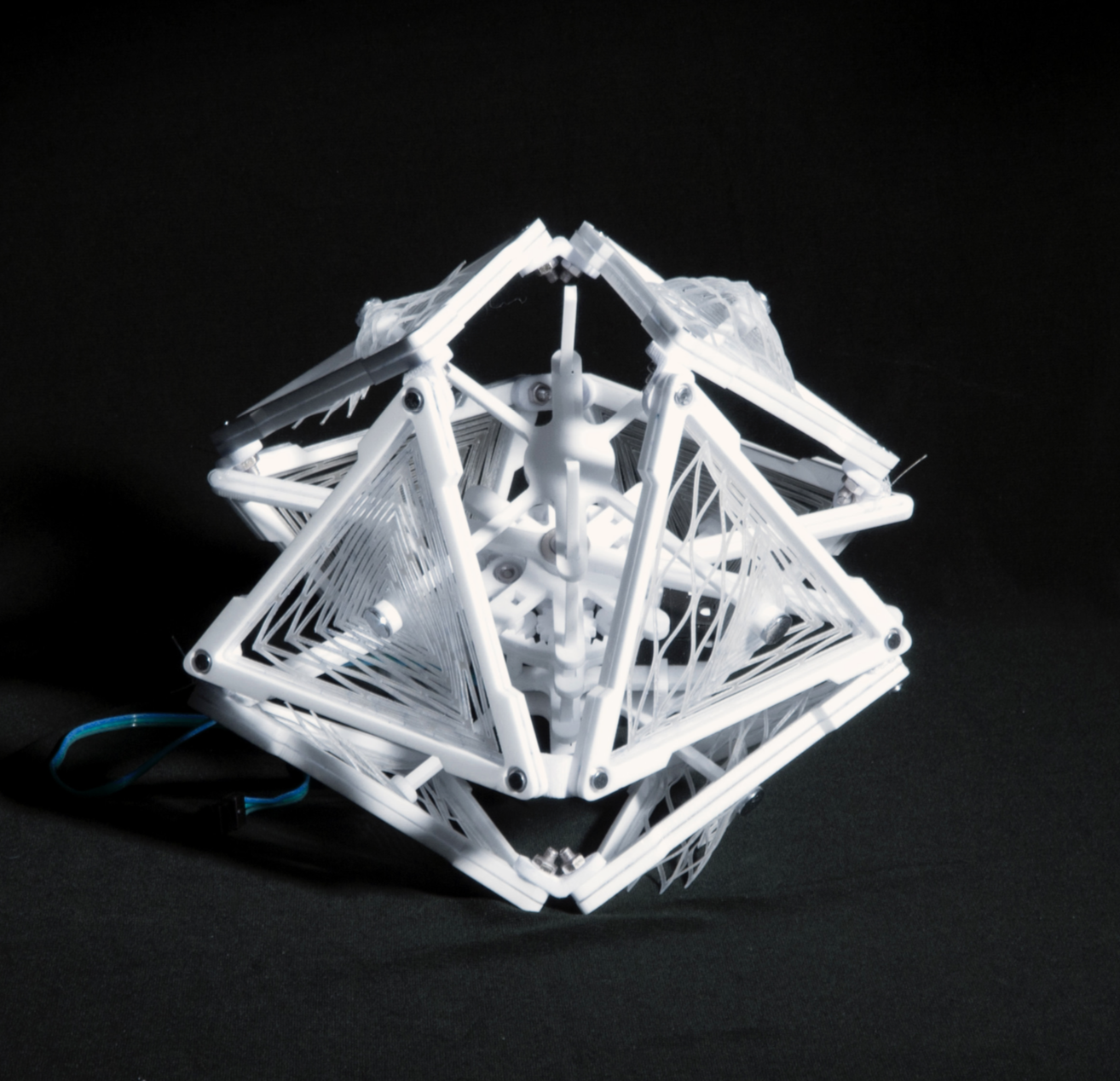
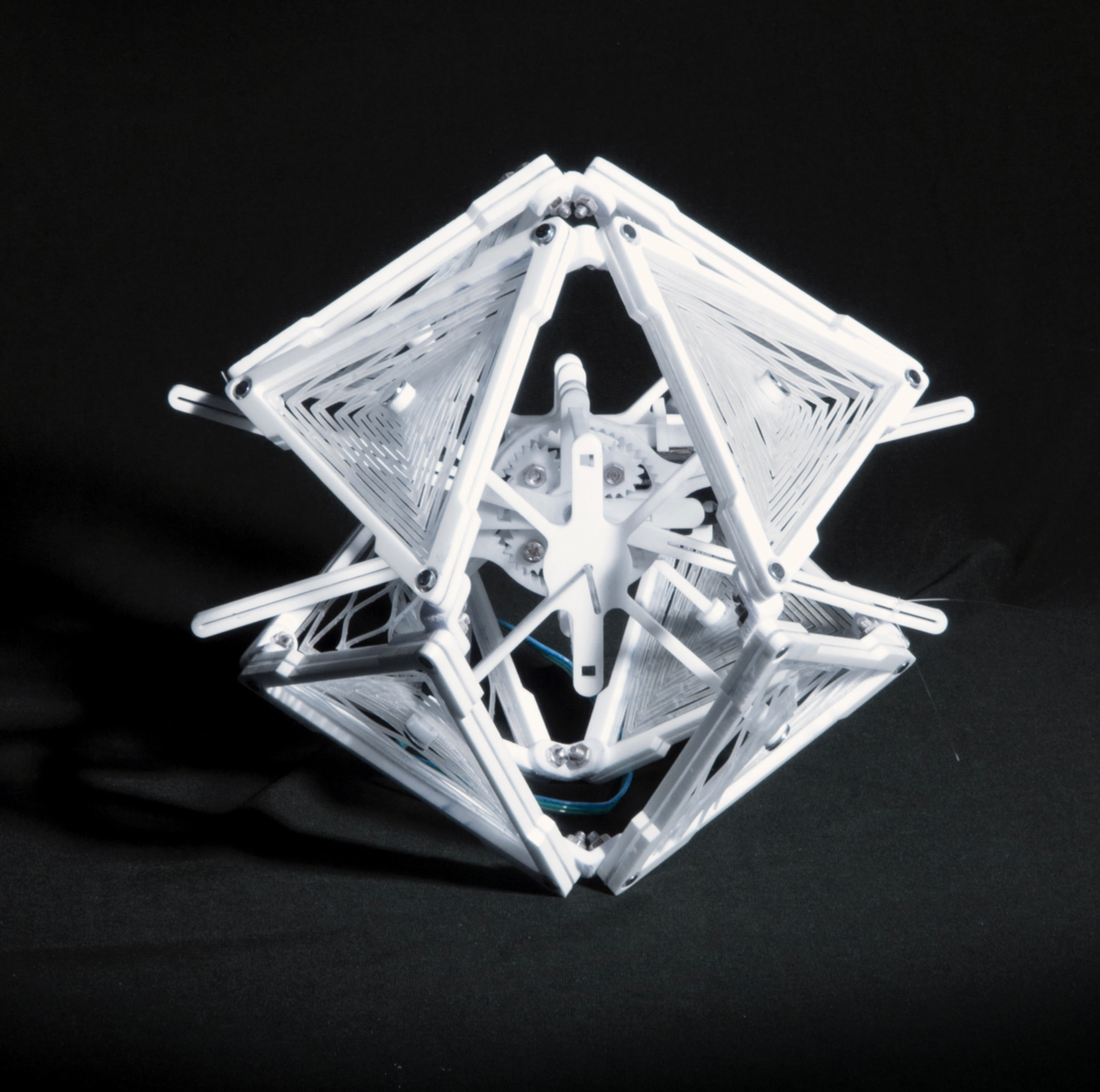
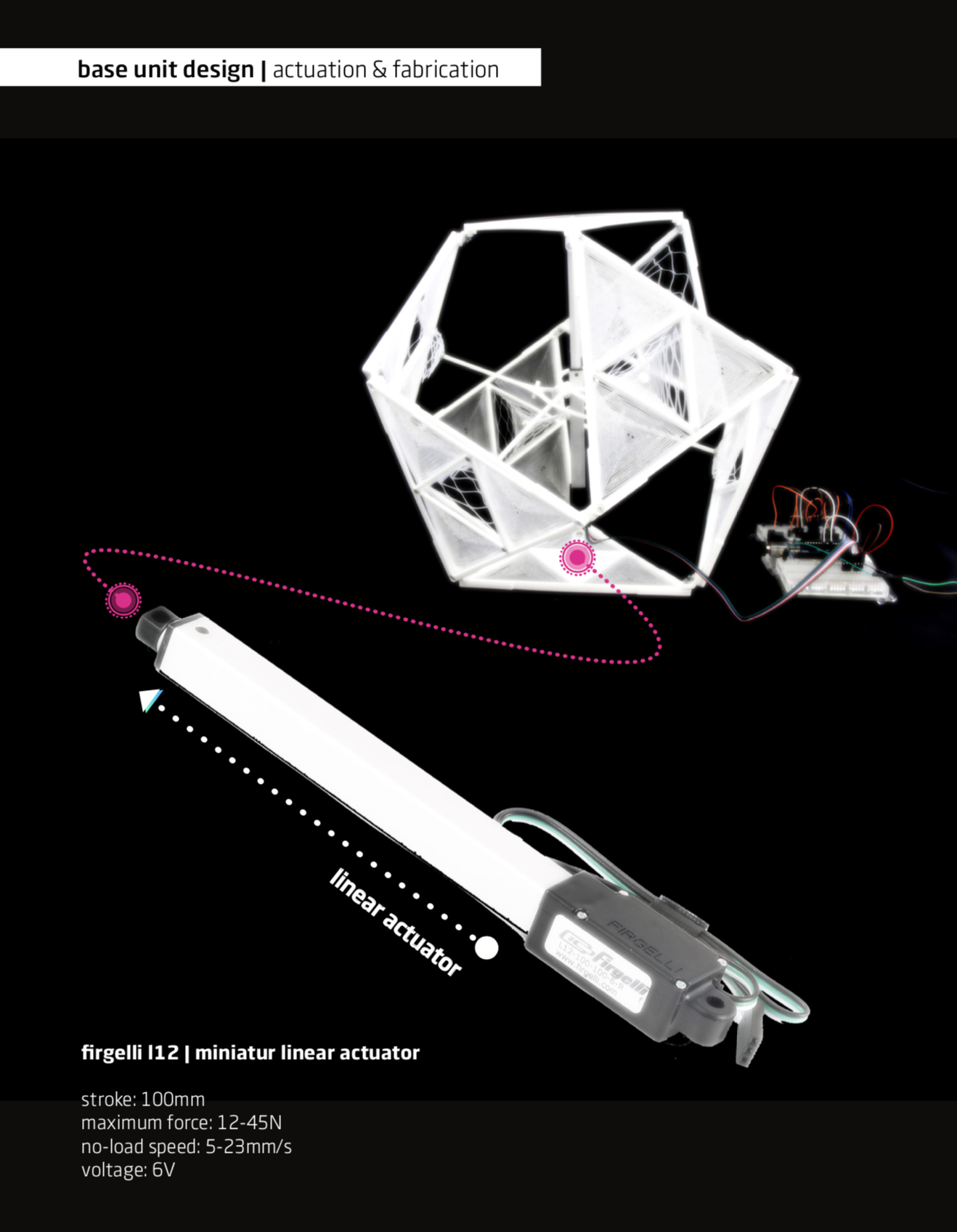
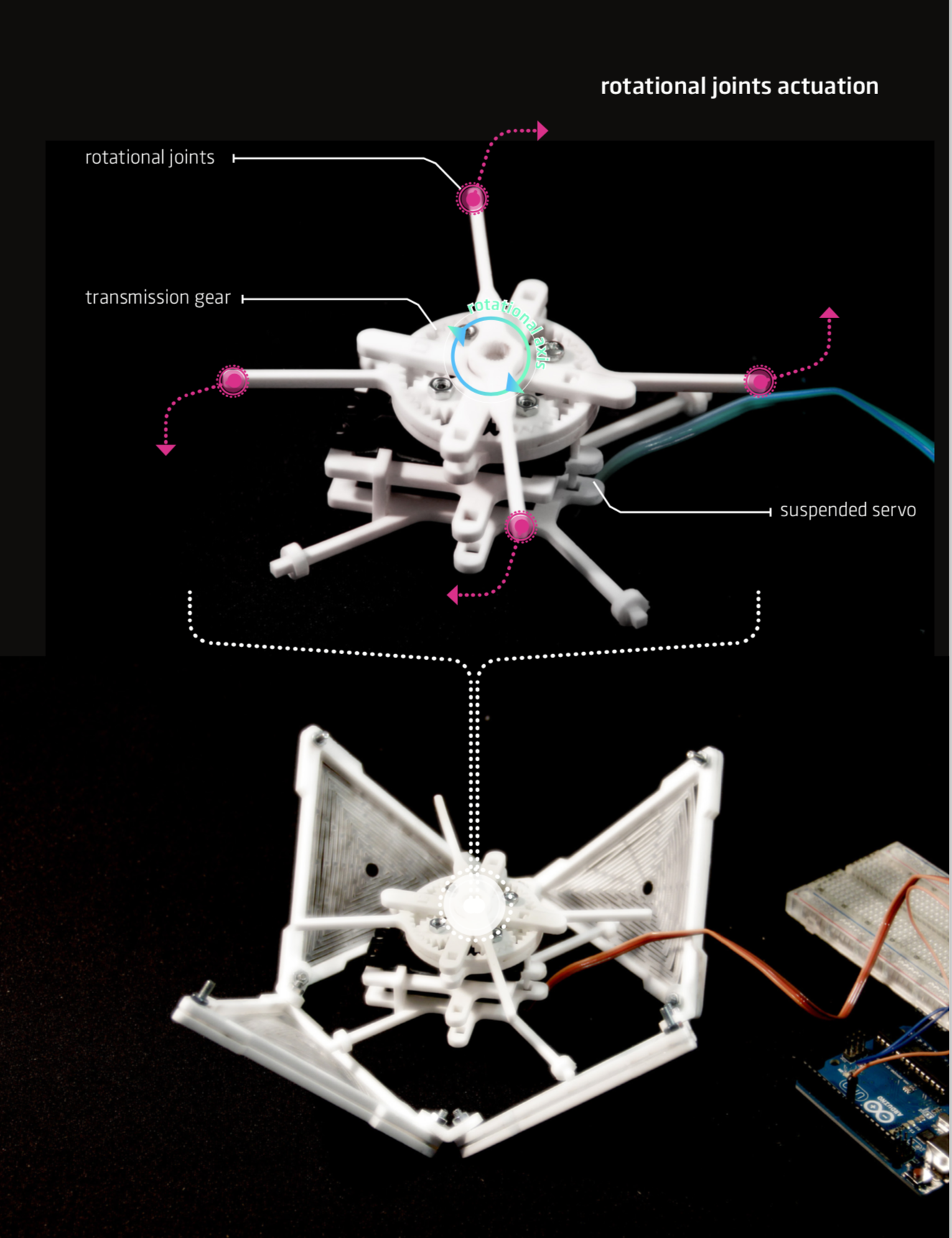
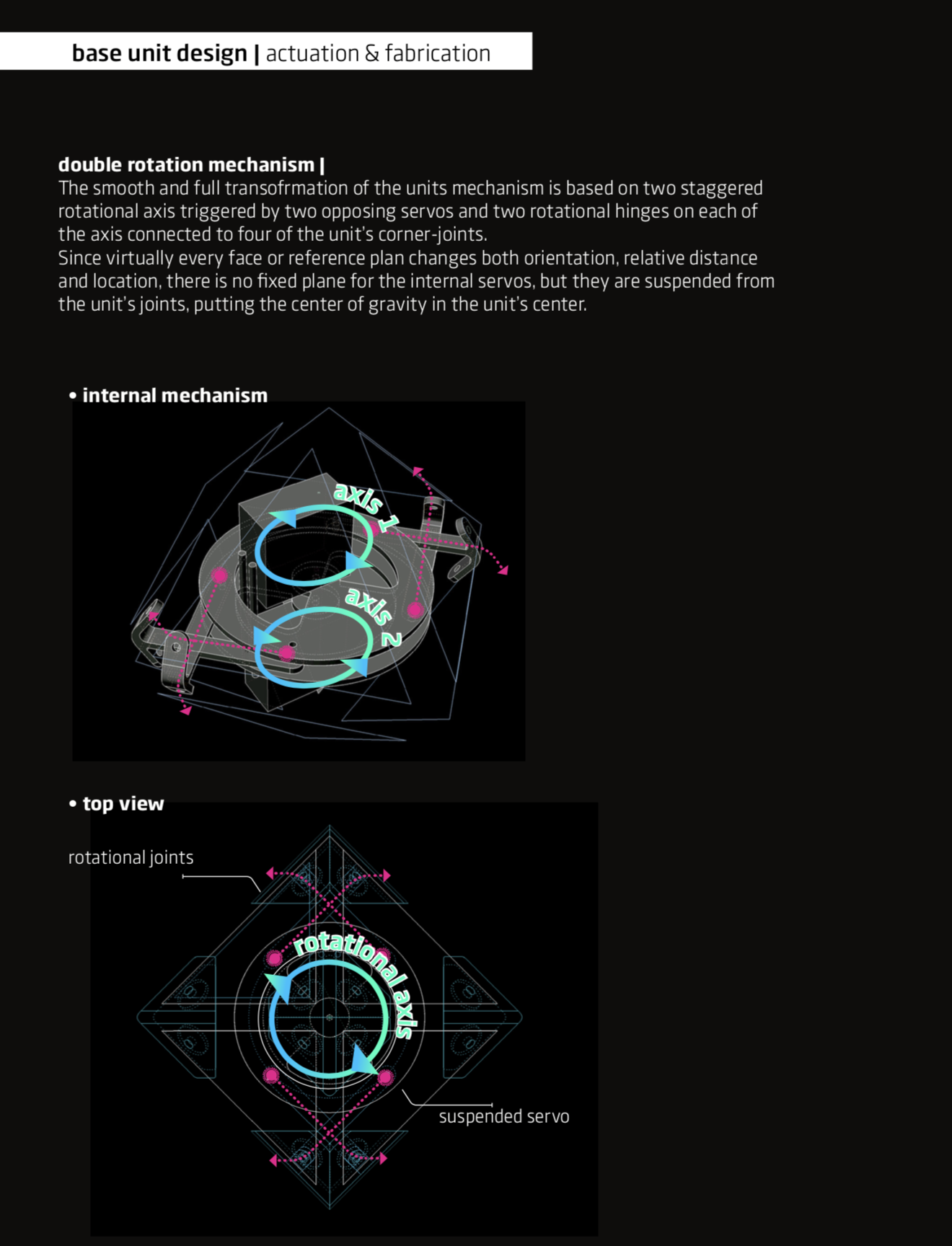
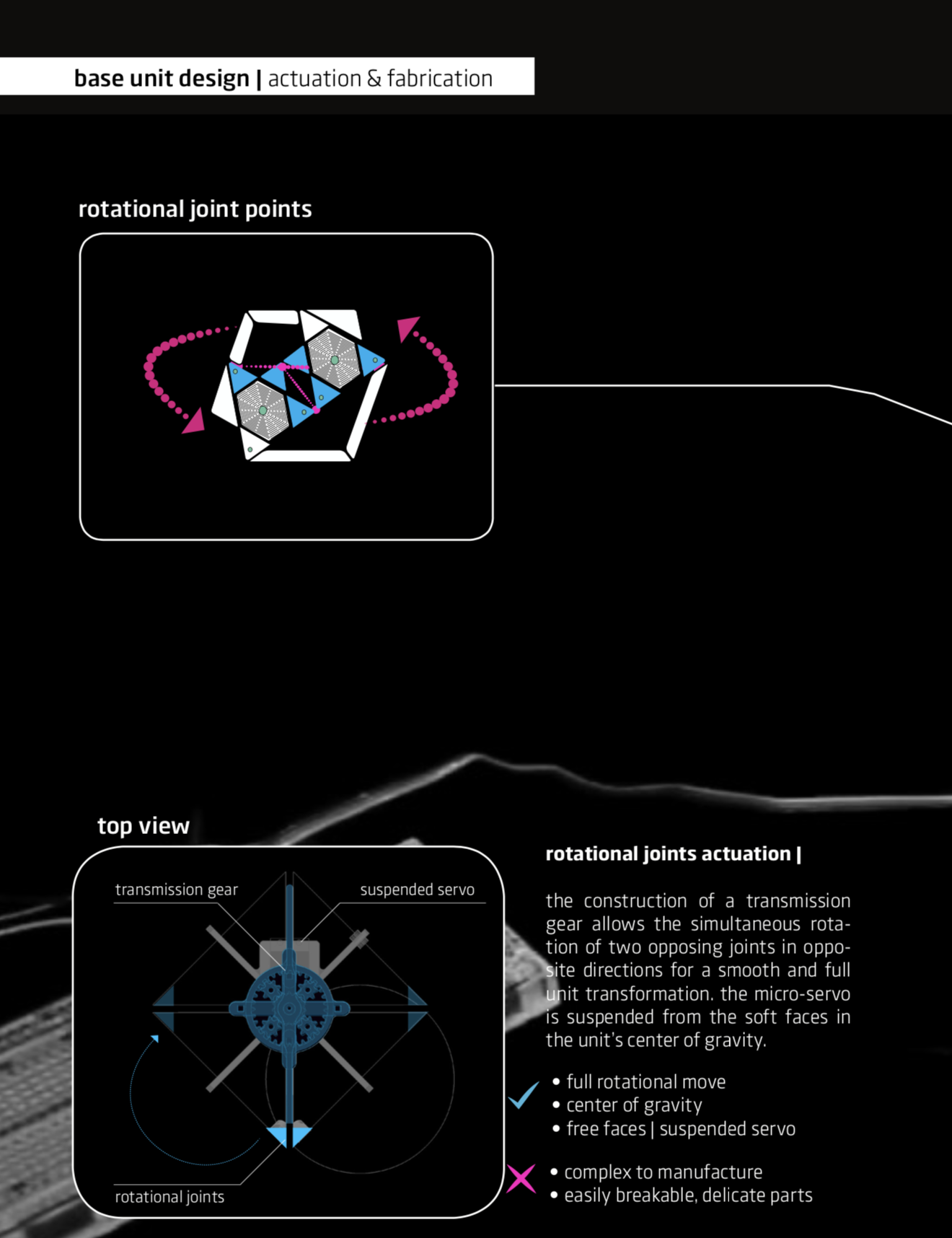
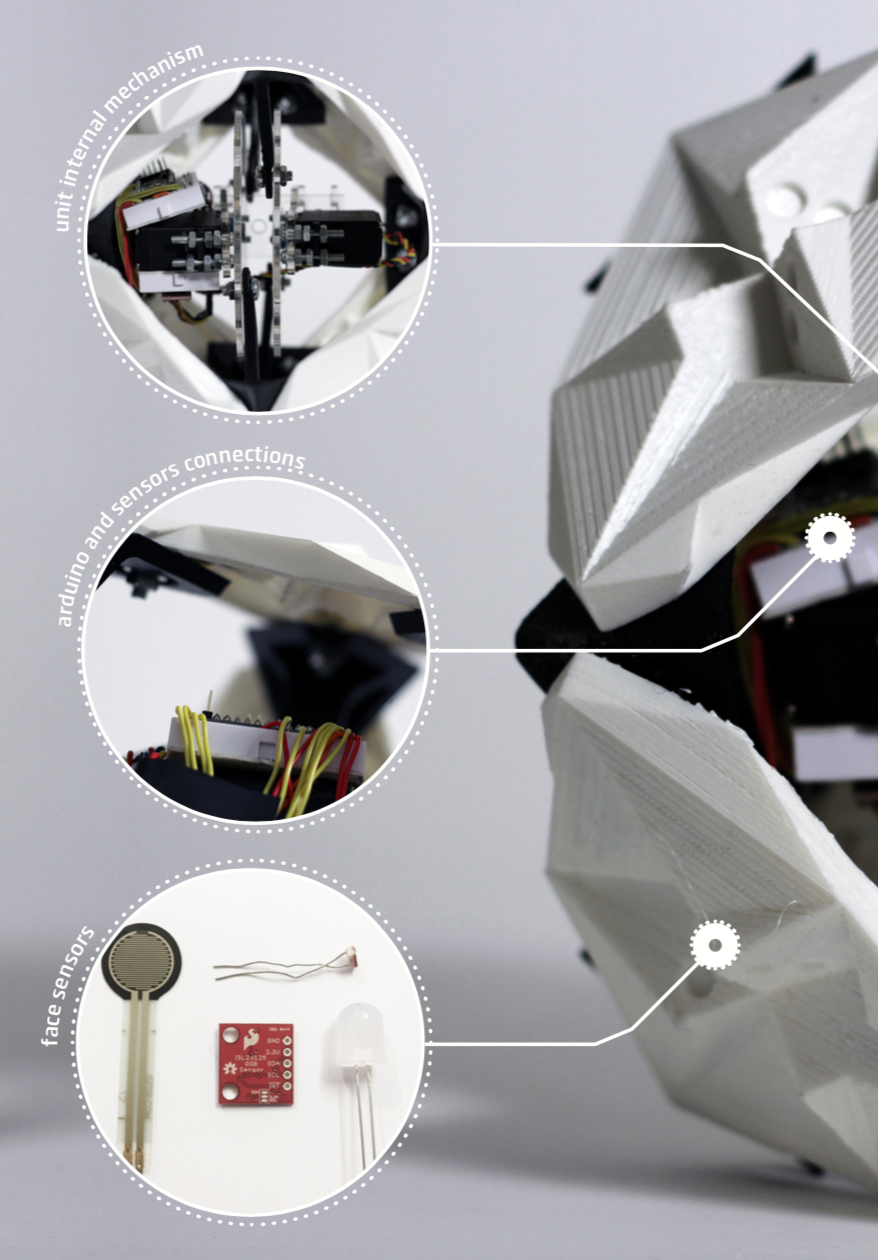
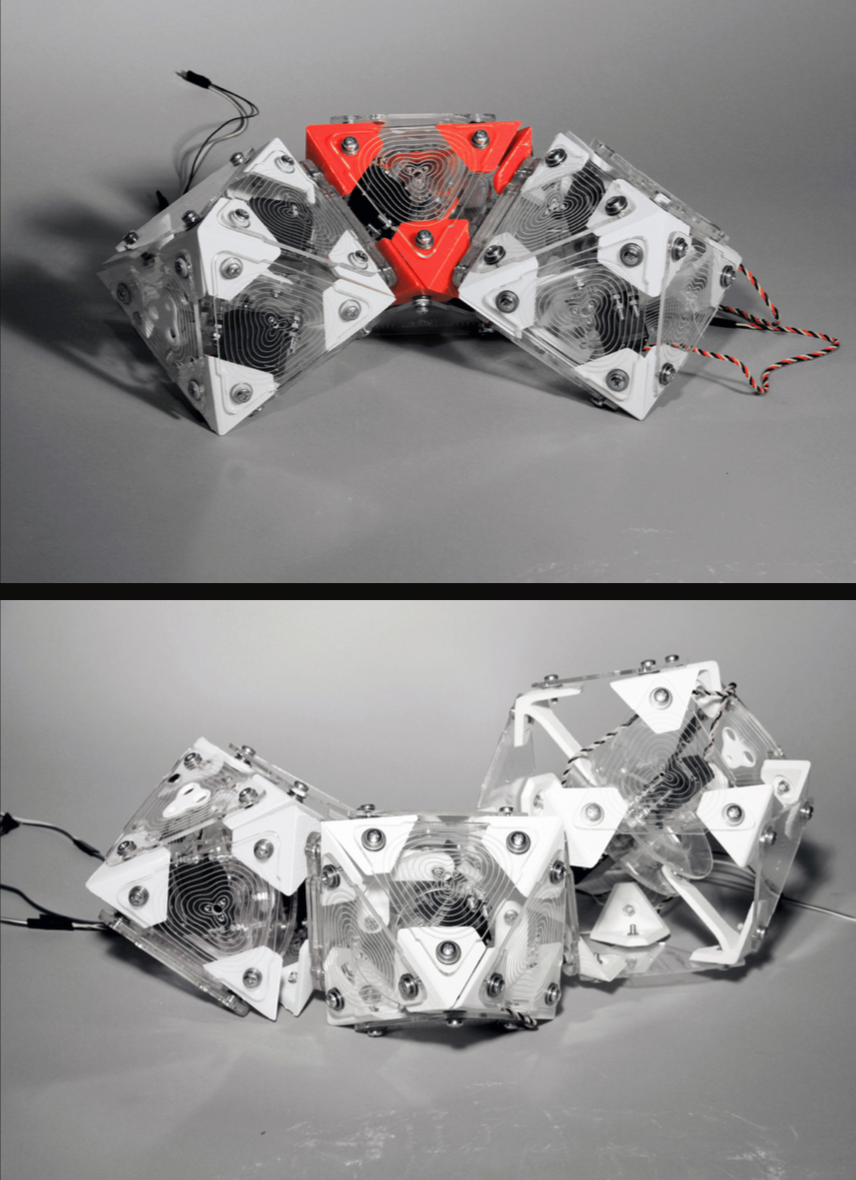
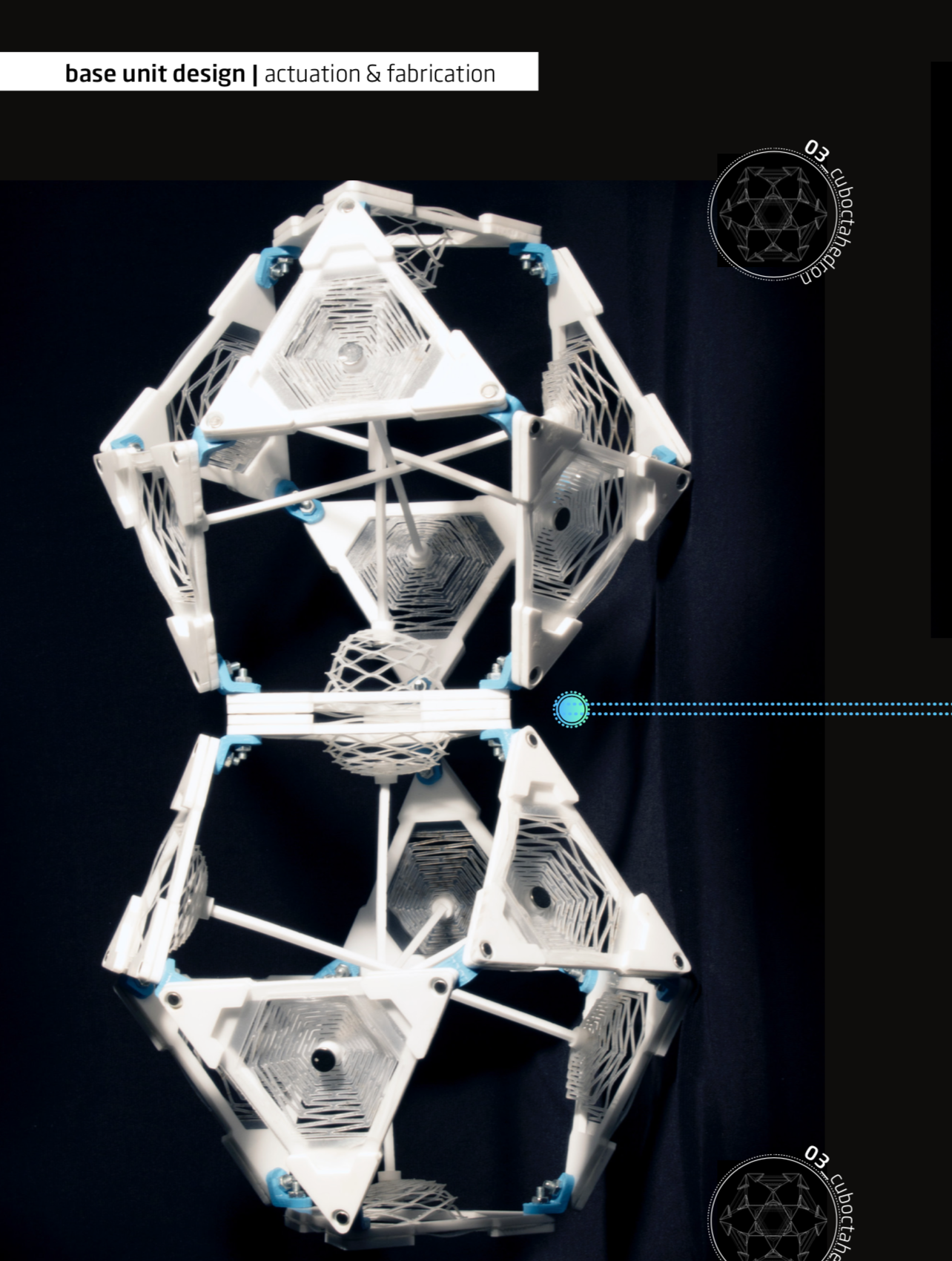
In order to actuate the unit and enable it to act autonomous, different approaches from introduction of flexible unit to unit interfaces to internal mechanics and controls were explored.
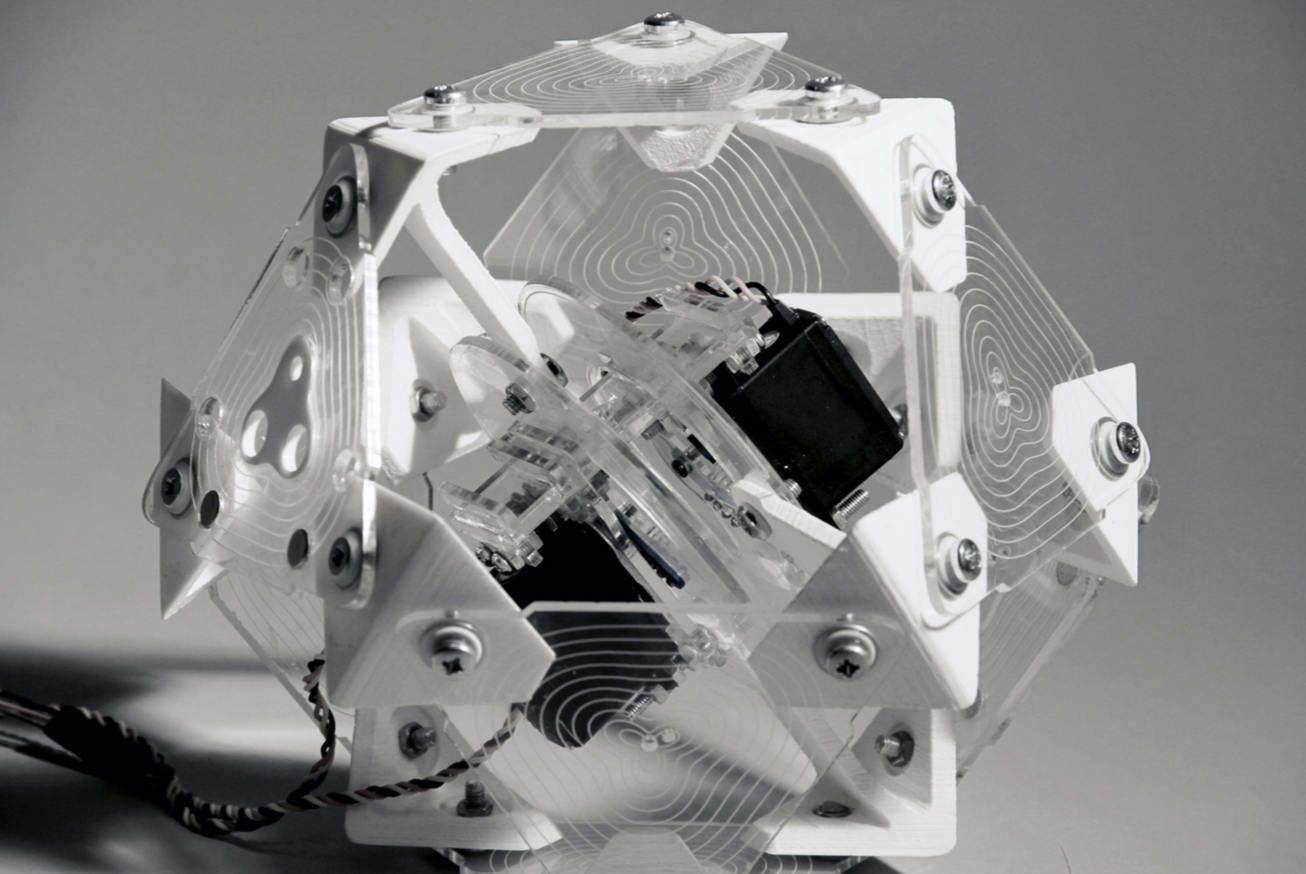
The main unit has several design features embedded that enable it to act autonomously and perform in a plug’n’play manner, The external shell follows two main function of Unit-to-Unit Interface: Construction & Communication between units, Construction is concerned with Connecting & Disconnecting and Interlocking between a Unit’s faces, Communication with Body-Plan Awareness and sequencing.
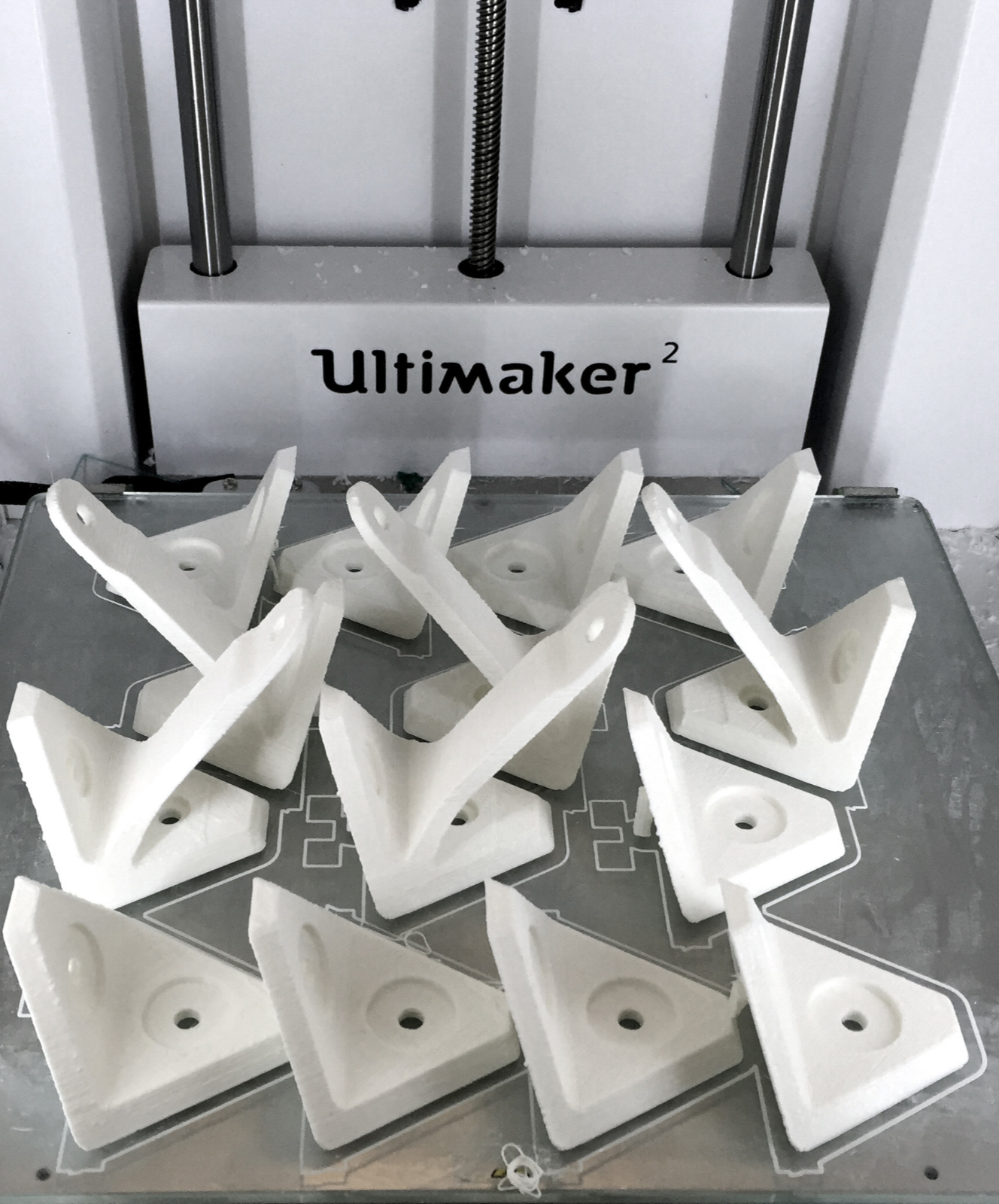
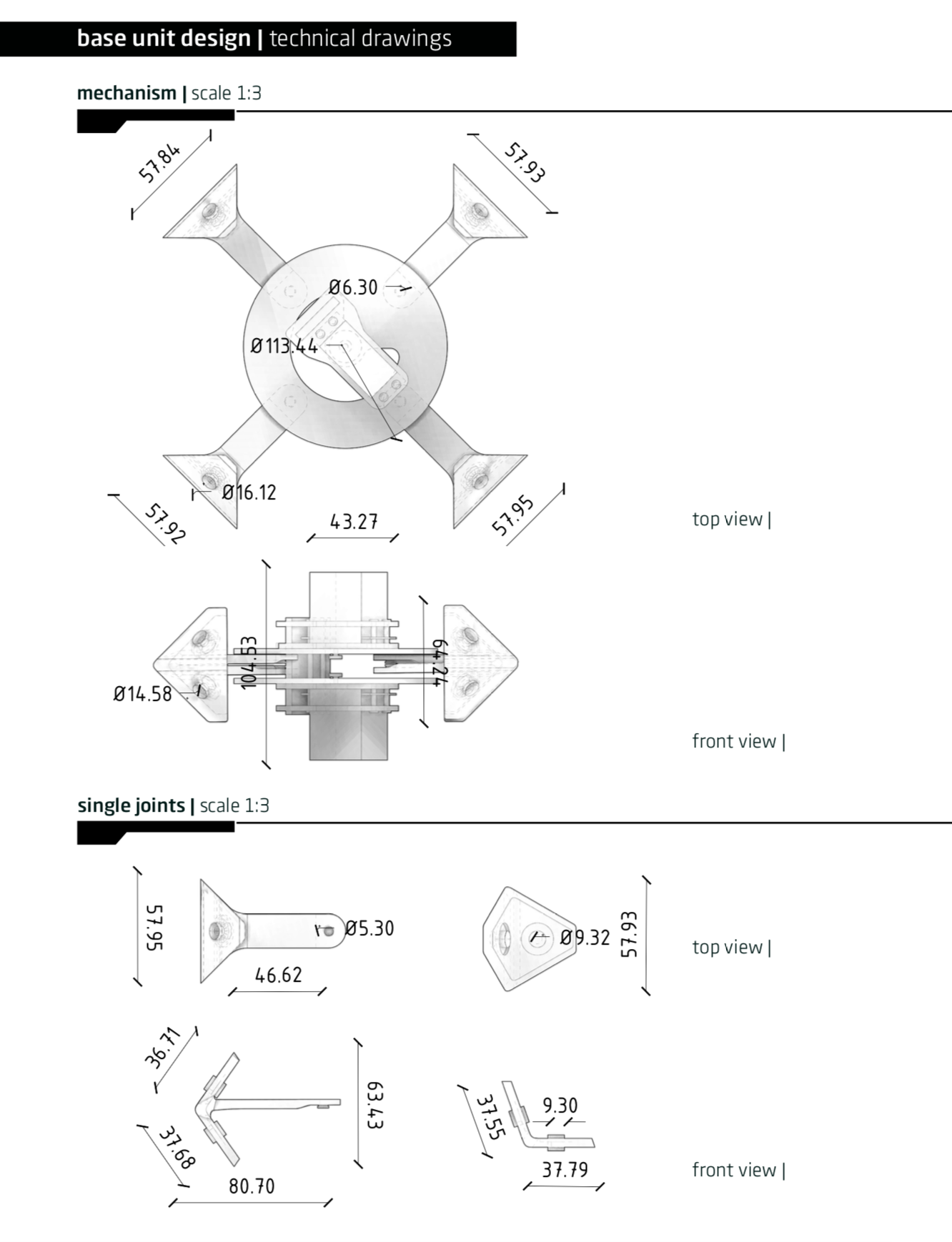
A single unit can be fabricated with simple diy components all parts except the electronics can be printed within 12 and assembled within 2 hours with any desktop 3d printer.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
-
DEPLOYMENT SIMULATIONS
05/20/2018 at 19:15 • 0 comments![]()
communication based simulation |
In contrast to the mechanical / spatial approach of growth and granch- ing logics, automated simulations of larger autonomous populations are based on the communicatioal aspects between units. The development of algorithmic rules of interaction and unit relations result in self-orga- nizing crowd behaviour.
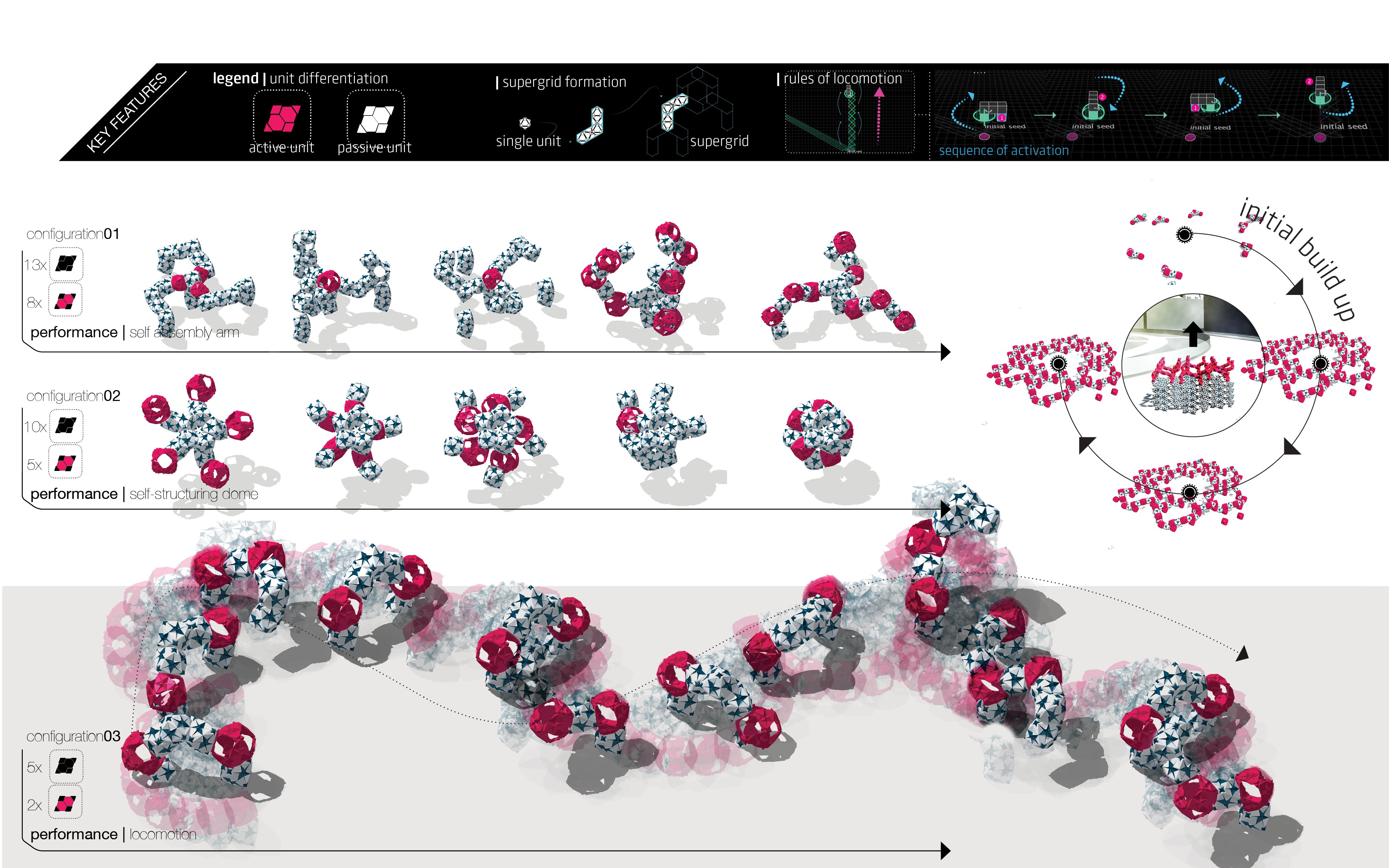
A field of passive units, as “dead” material, is potentially shifted around in space by a connected active unit. Movement fundamentally starts on the ground plane or - if an active unit autonomously decides on a poten- tial building site for a settlement - start build vertically.
These goal oriented simulations create negotiated space, i.e they act according to an dialogue between:
• bottom up decision making of every single unit for example: if it is in the center of an overpopulated area, an active unit can decide to act as an repulsor, creatng void spaces or, if an active unit is in an empty area, it can act as an initial seed for a settlement as attrac- tor to other units
• top down rules such as: different deployment strategies, dependent on their initial istri- bution (i.e. multiple seeded building scenarios), migrateing from one site to another
![]()
![]()
![]()
![]()
![]()
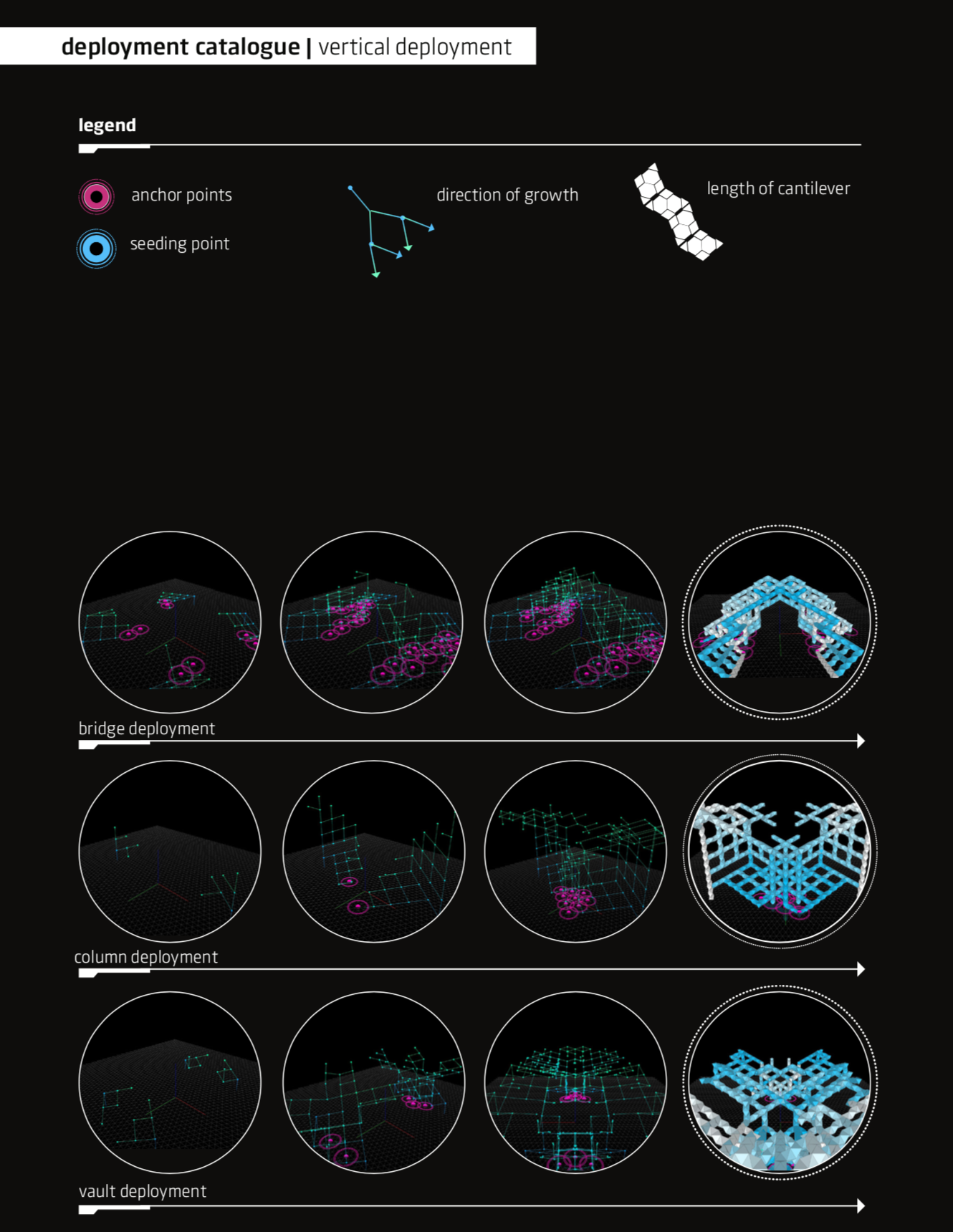
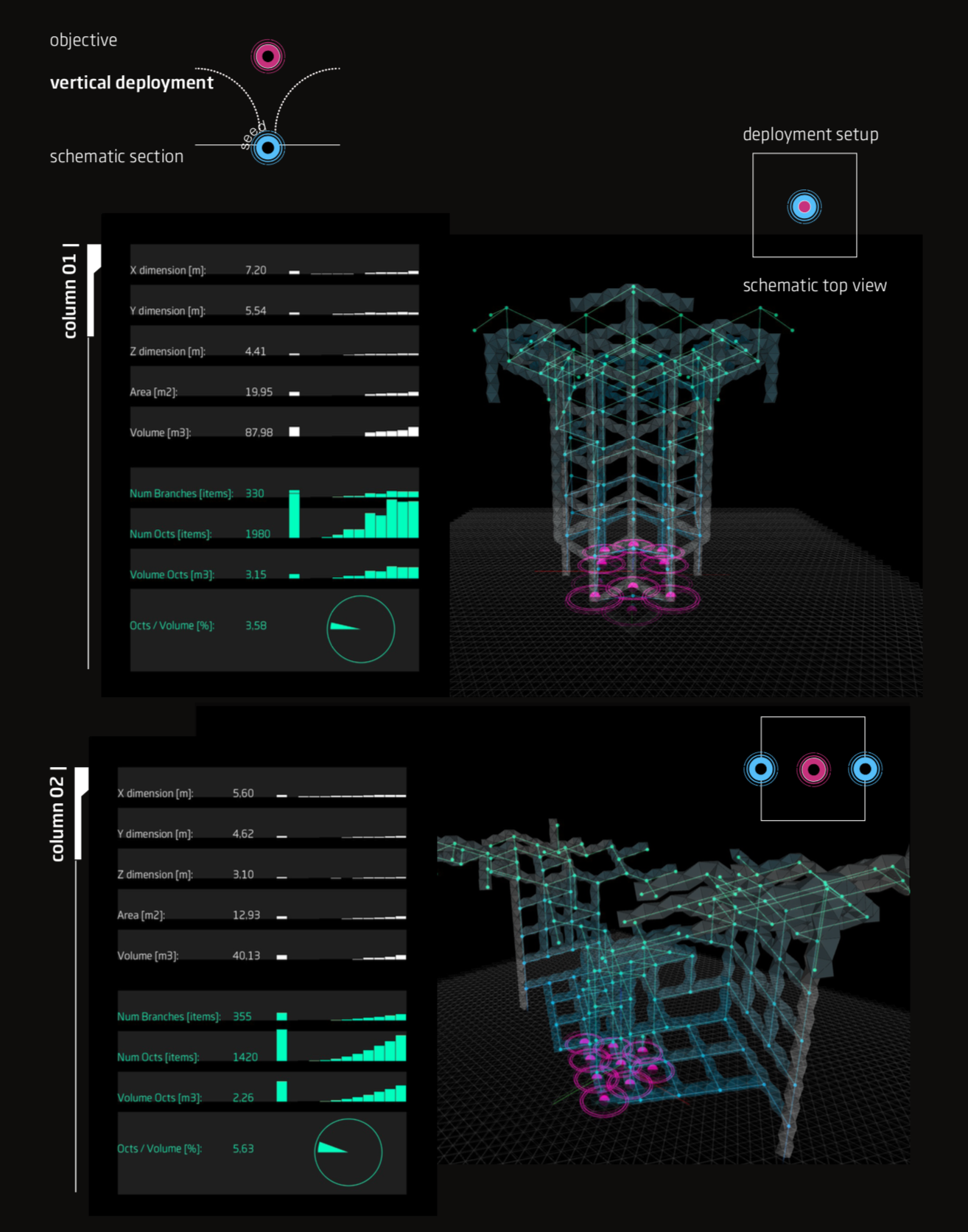
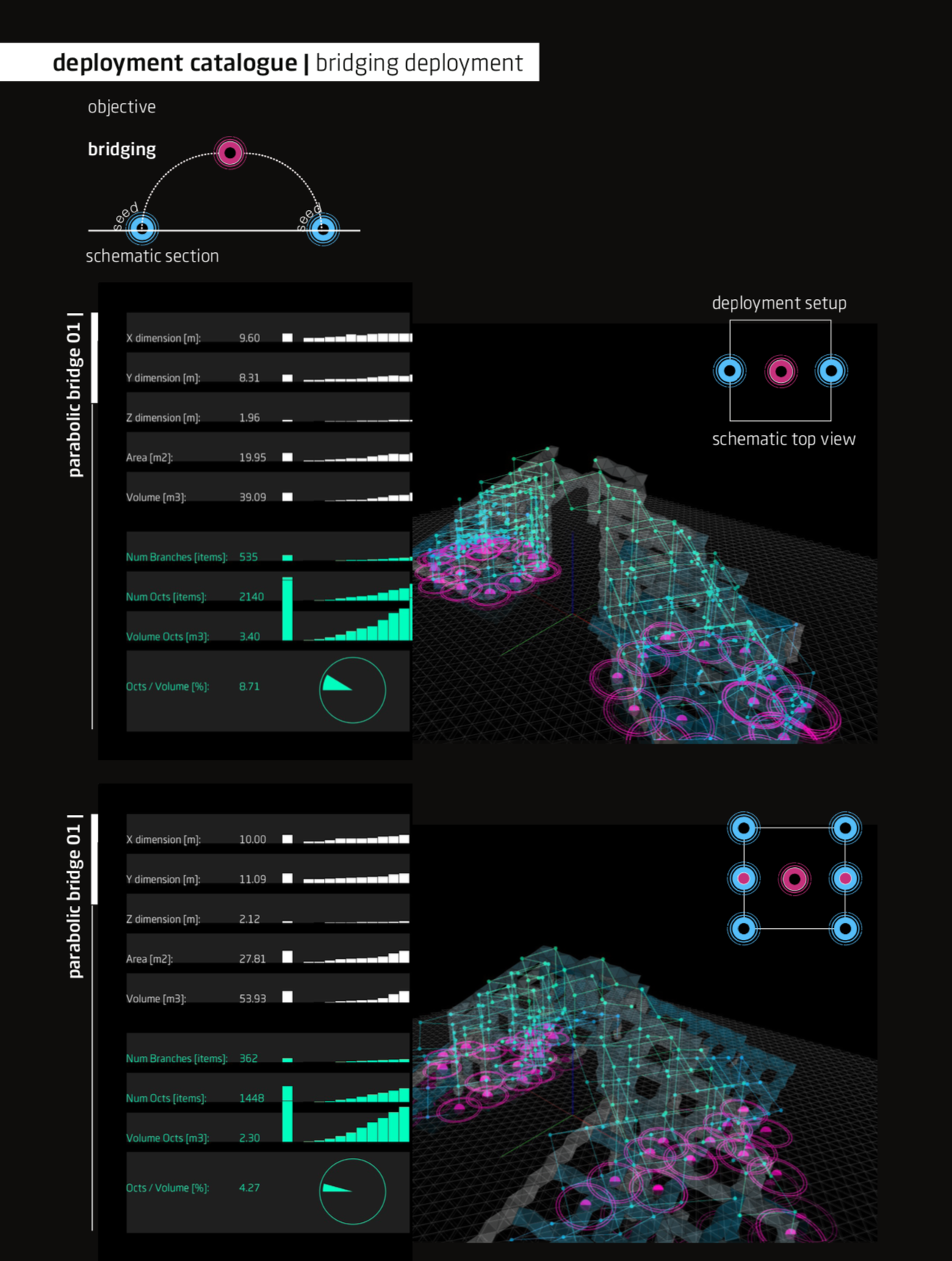
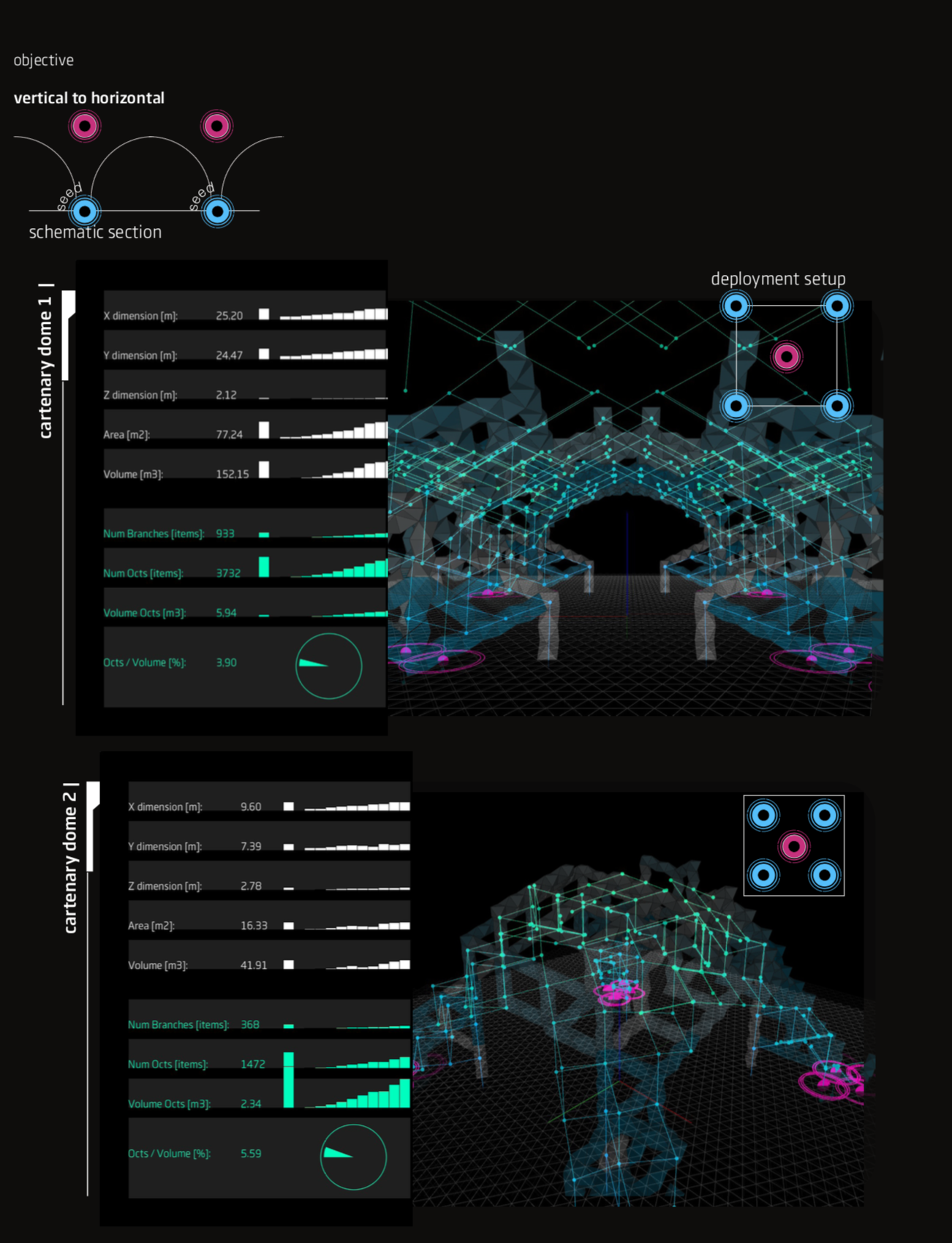
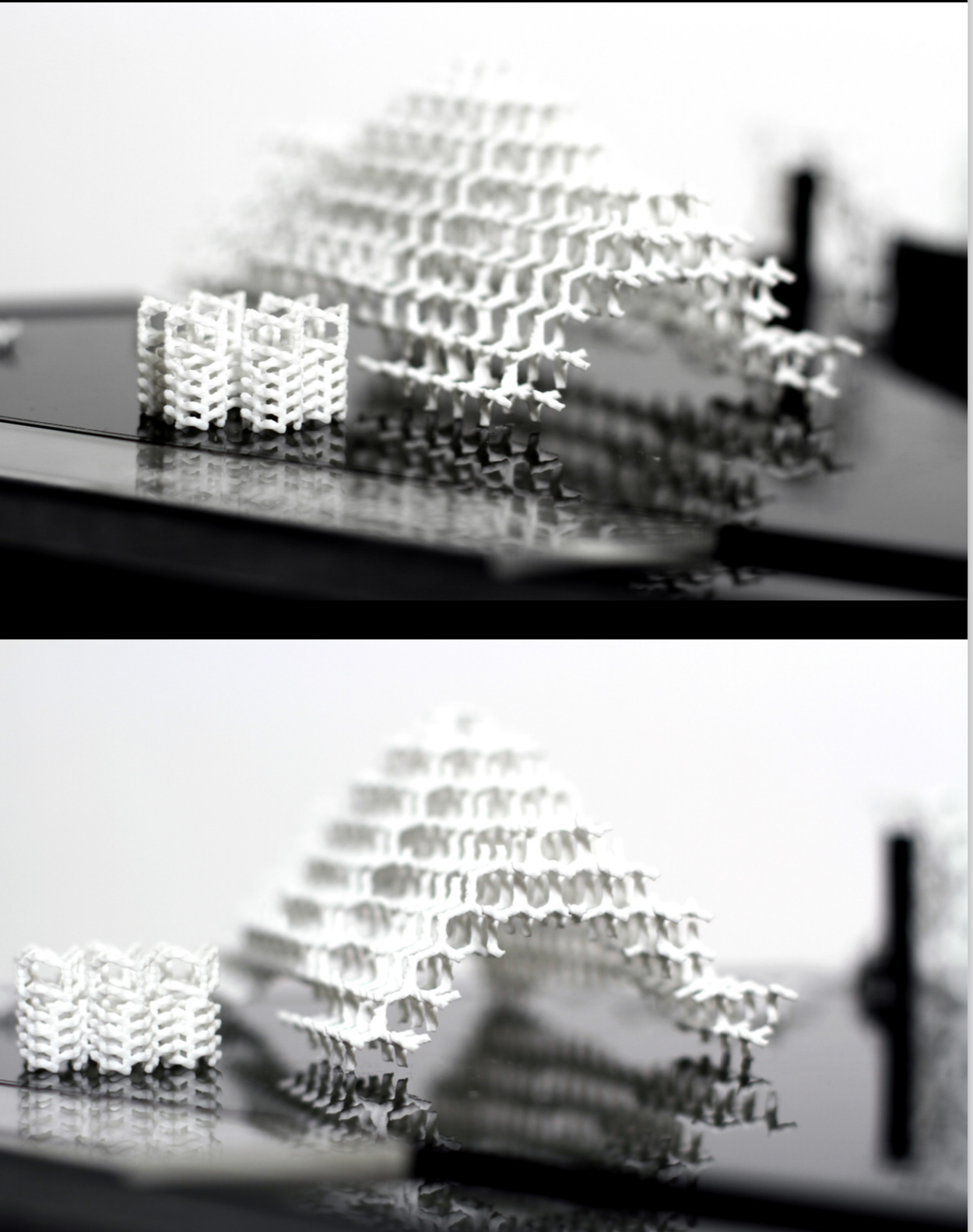
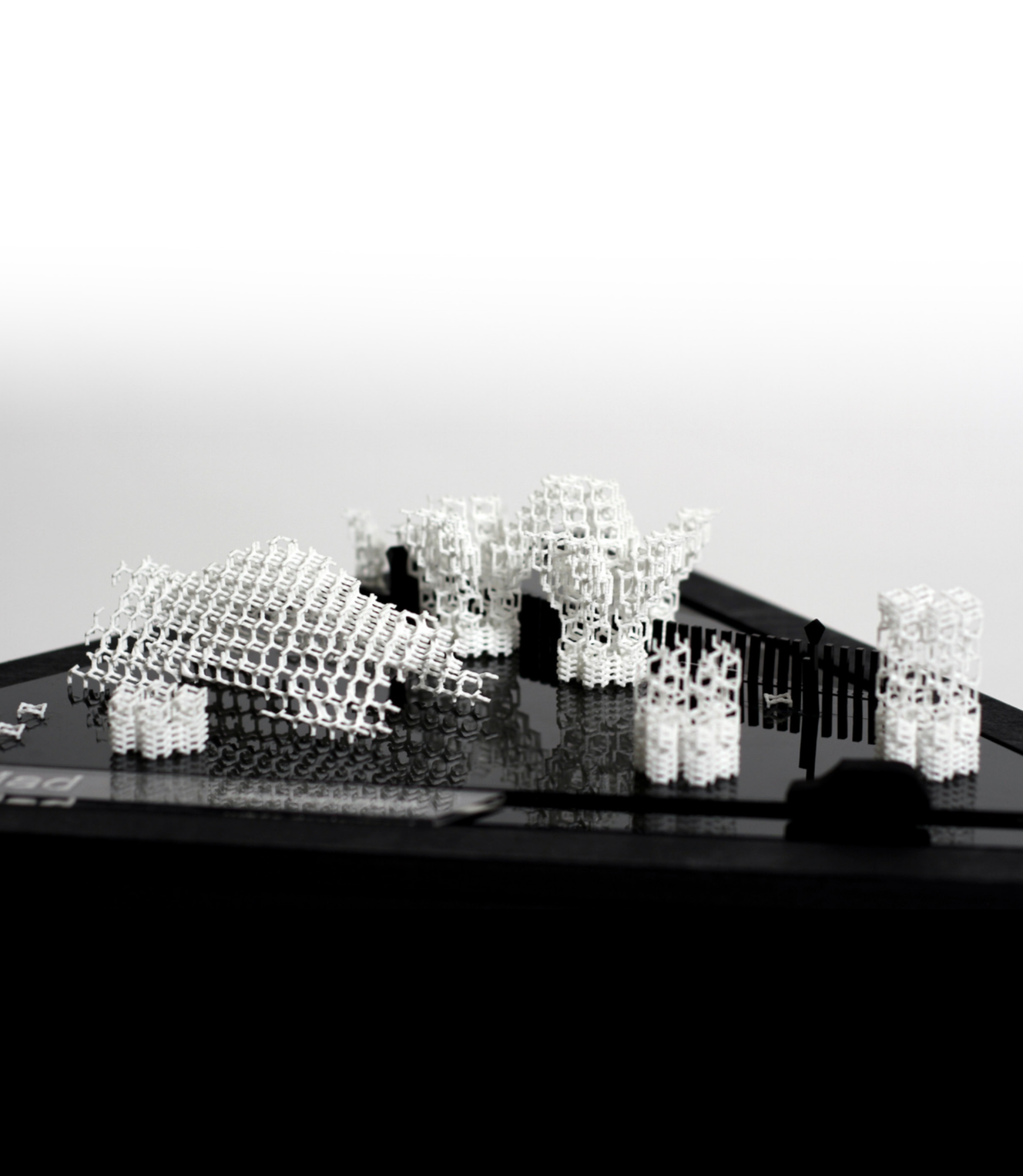
spatial configurations |
Through the development of different computational models, central evaluation criteria of high population collectives are defined by the system’s space making abilities. Spatial configurations were tested under specific, simple goals - i.e. a bridge, a vault, a pillar, - to perform compres- sion based aggregations due to the component based na- ture of the system.
The deployed system aggregates with an adaptive degree of detail, allowing a higher density grid where finer resolution is needed, i.e. for fine elements or strong surface curvature.
![]()
![]()
![]()
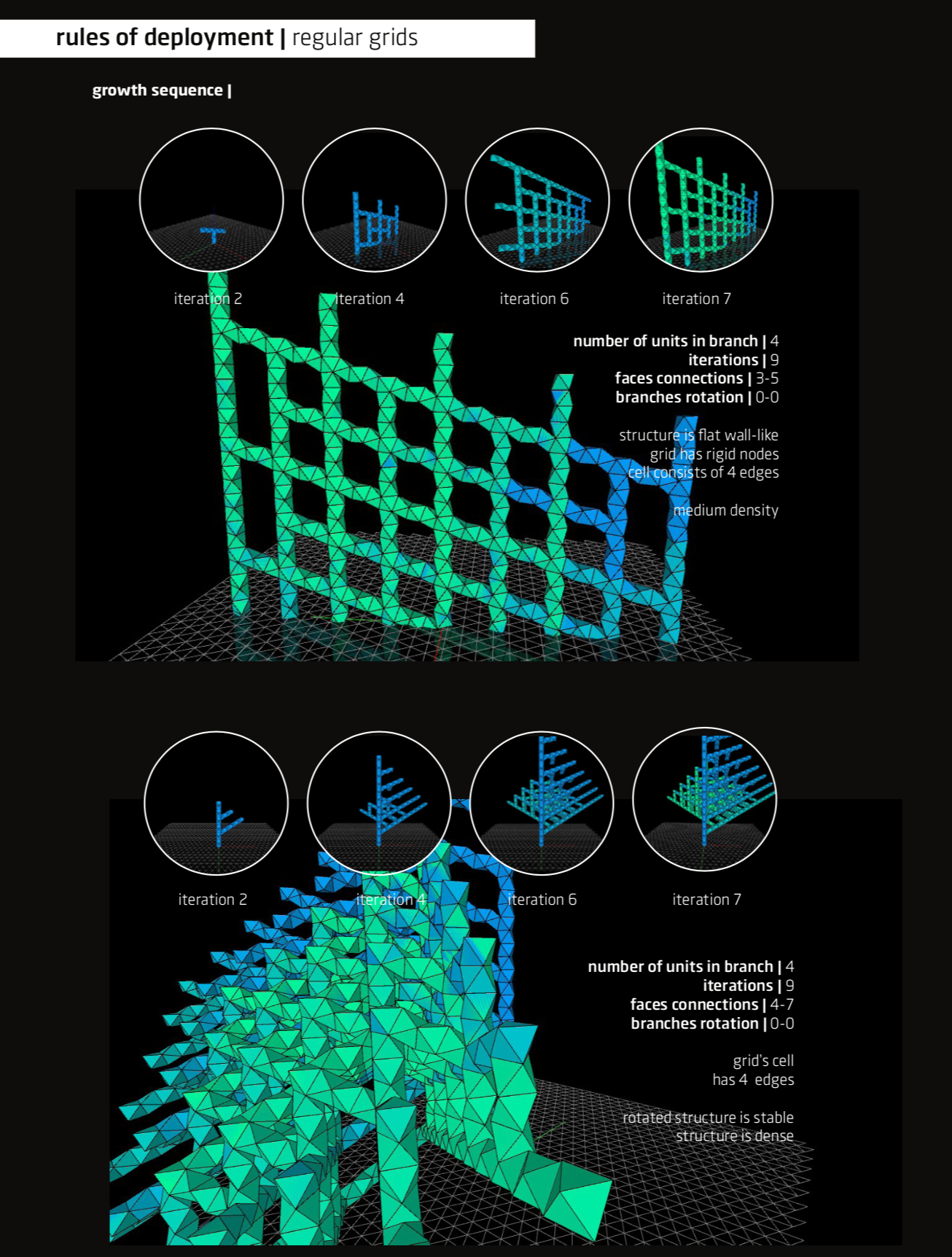
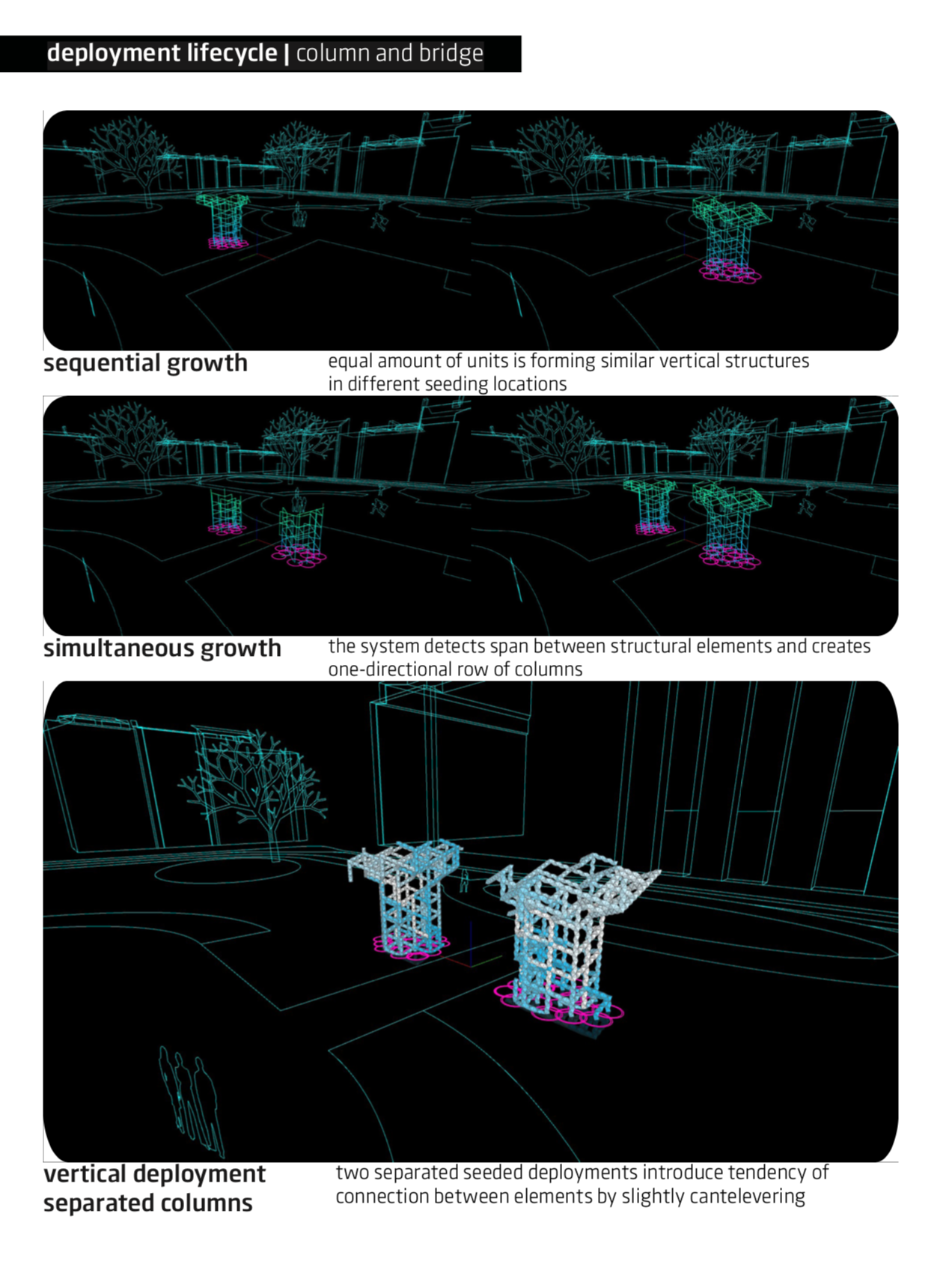
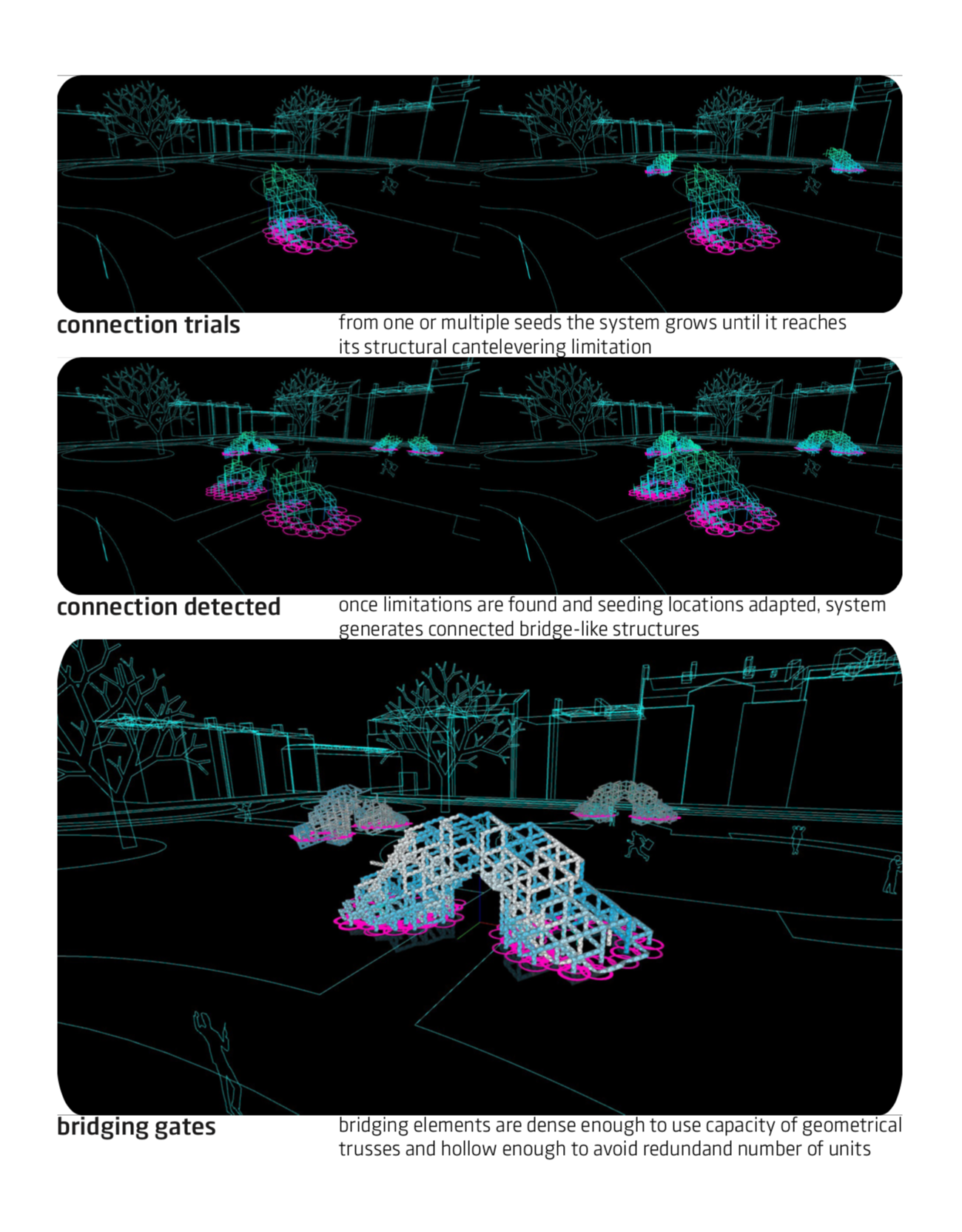
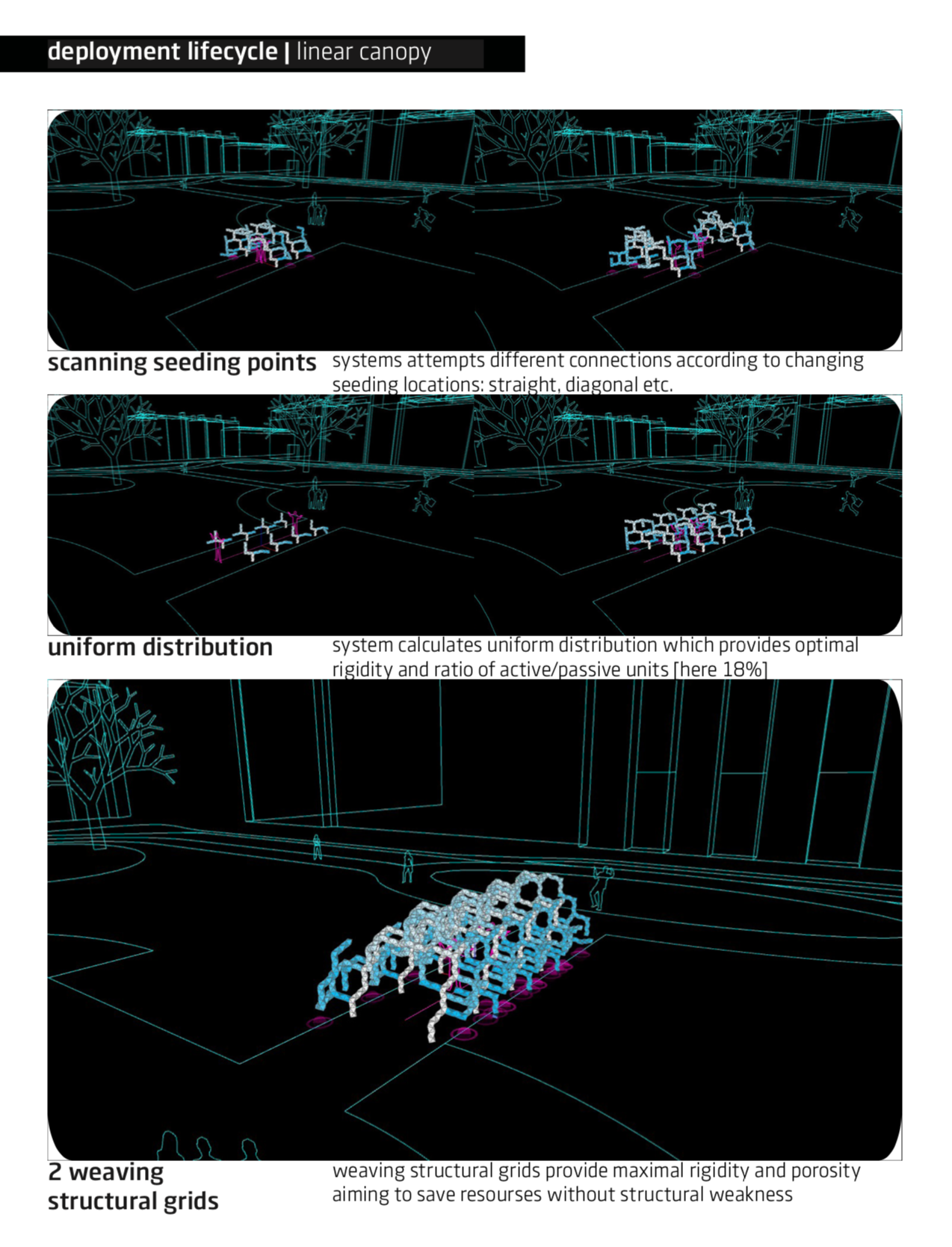
rules of deployment |
When looking at systems of growth and deployment, the research is engaging with systems that are not fully packed to avoid interlocking, following the idea of lattice and scaf- folding, Relying on its kinetic qualities, the system is keep- ing flexibility by leaving gaps.
Local and global rules and constraints are introduced ac- cording to results from physical and build up simulations. Growth and branching logics are adapted to fit the criteria of the units geometry, considering its natural constraints by adaptive decision making, such as adaptive cantilever of the grid according to maximum number of units in a linear cantilever (based on physical experiments), resulting in dif- ferent porosity and scale with identical growth logic.
In a fully played out deployment lifecycle, the system be- haves according to different sets of goals it is given, its natural constraints (amounts of available units and time) and itscontext. The propotion between number of units in- volved in assembly and time required acts exponential. During its build up, the system reacts to changing goals or conditions by live-adaption, re-calculating its possibilites to build and connect and takes decision of de-construction and re-deployment.
These rules and logics of deployment result in a diverse variety of structureswith different spatial qualities and potential urban scenarios.
![]()
![]()
![]()
![]()
-
ASSEMBLY SEQUENCES
05/20/2018 at 10:31 • 0 comments![]()
![]()
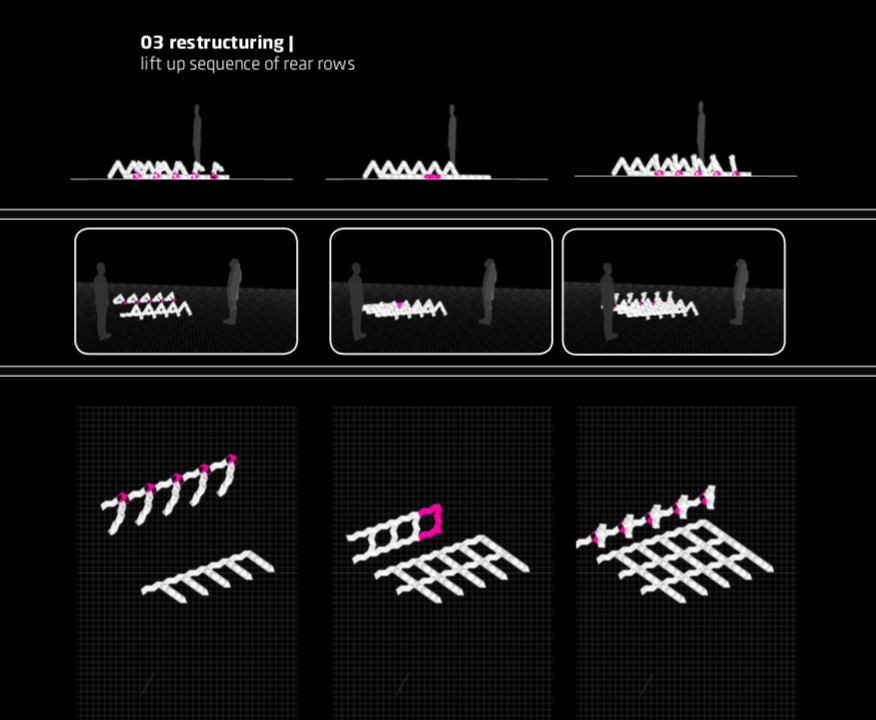
sequence of assembly |
Emerging from its mobile state, the system utilizes different strategies of se- quencing assembly.
Hereby, either the structure can act passive with active agents expanding, climb- ing,manipulatingitsgrid-orthestructureitselfsfunctionsasactivator,transport- ing and lifting passive material along to enable reinforcements, extensions etc. Initially, mobile bodies assemble on the ground plane, building a solid base for vertical build up, utilizing systems of temporary scaffolds, 2d unfolded space- frame structures and sequenced choreographies of movement to position its parts.
![]()
unrolling of spatial structure |
Able to form a grid starting from the ground, both as initial position for its build up pro- cess and as a remaining fundament for cantilevering and vertical aggregations. Single bodies are coming together in a 2d unfolded version of their final structural grid on the ground, then using their transformational abilites to lift and build up to its spa- tial organization, resp reconfigure during its already half-build up sequence.
![]()
![]()
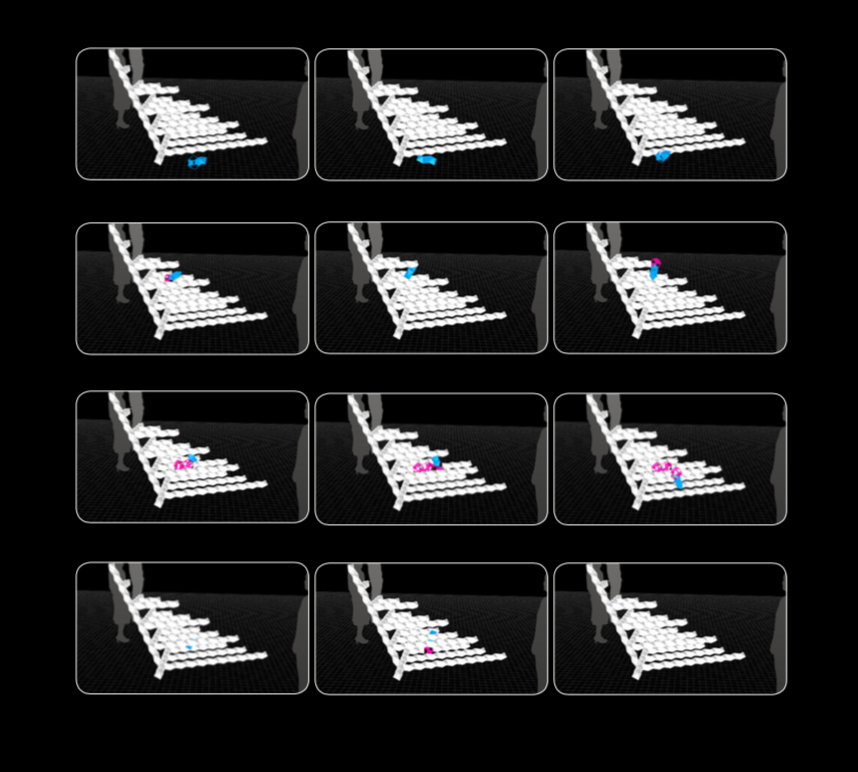
synchronized assembly | simultaneous macro-movements
Choreography of movement is main driver in the assembly process. movement is not necessarily synchronized, but can be triggered one after the other with currents being transported over the field, sharing one sequenced energy. Due to the limited lifting capabilities of a single unit - based on physical experi- ments of maximum cantilever - build up sequences are relying on ways of mul- tiple simultaneous choreographed local movements, resulting in global build up
![]()
![]()
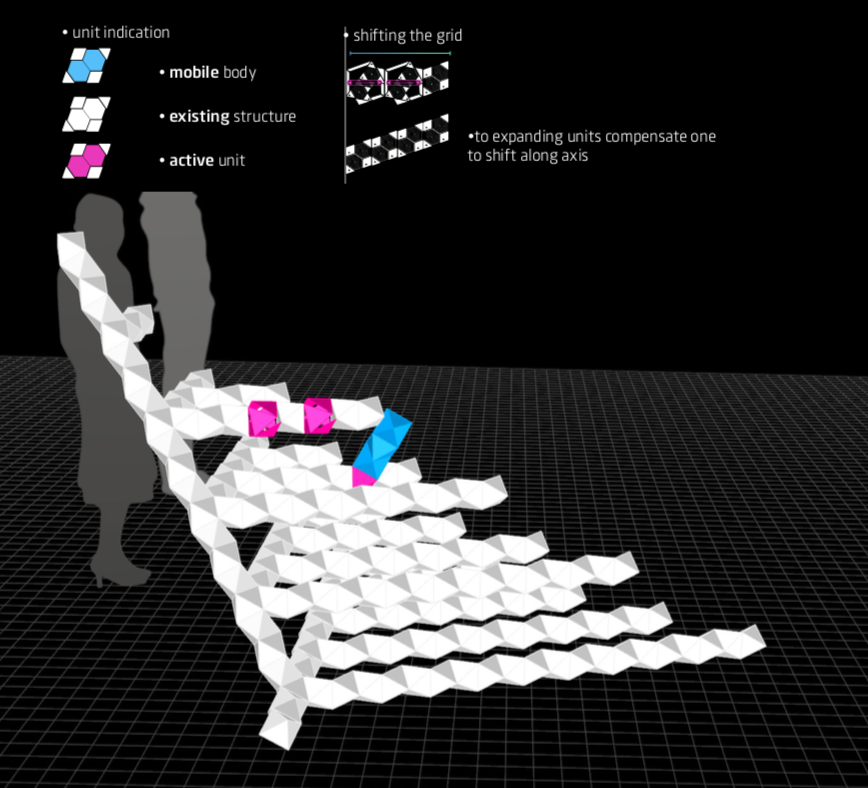
lift up matter | movement of passive material by active agents in the grid
Following the cycle of evaluation and identifying of weak spots, transportation along existing structure is used for local interventions and reconfigurations. Using the existing structure as climbing frame to move freely and reach area of weakness units of reinforcement are being lifted among the levels or shifted linear along the grid, with two expanding units compensating one to shift on axis.
-
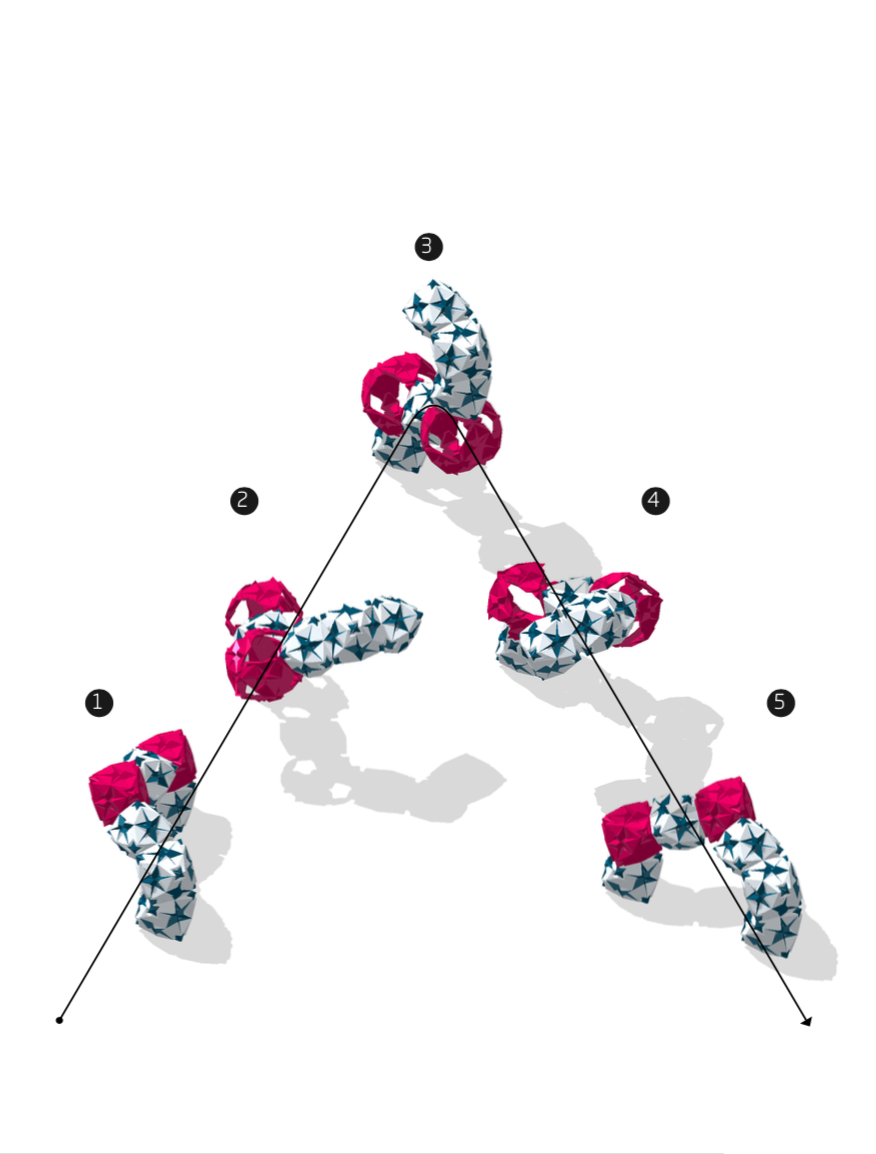
AUTONOMOUS MOVEMENT SIMULATIONS
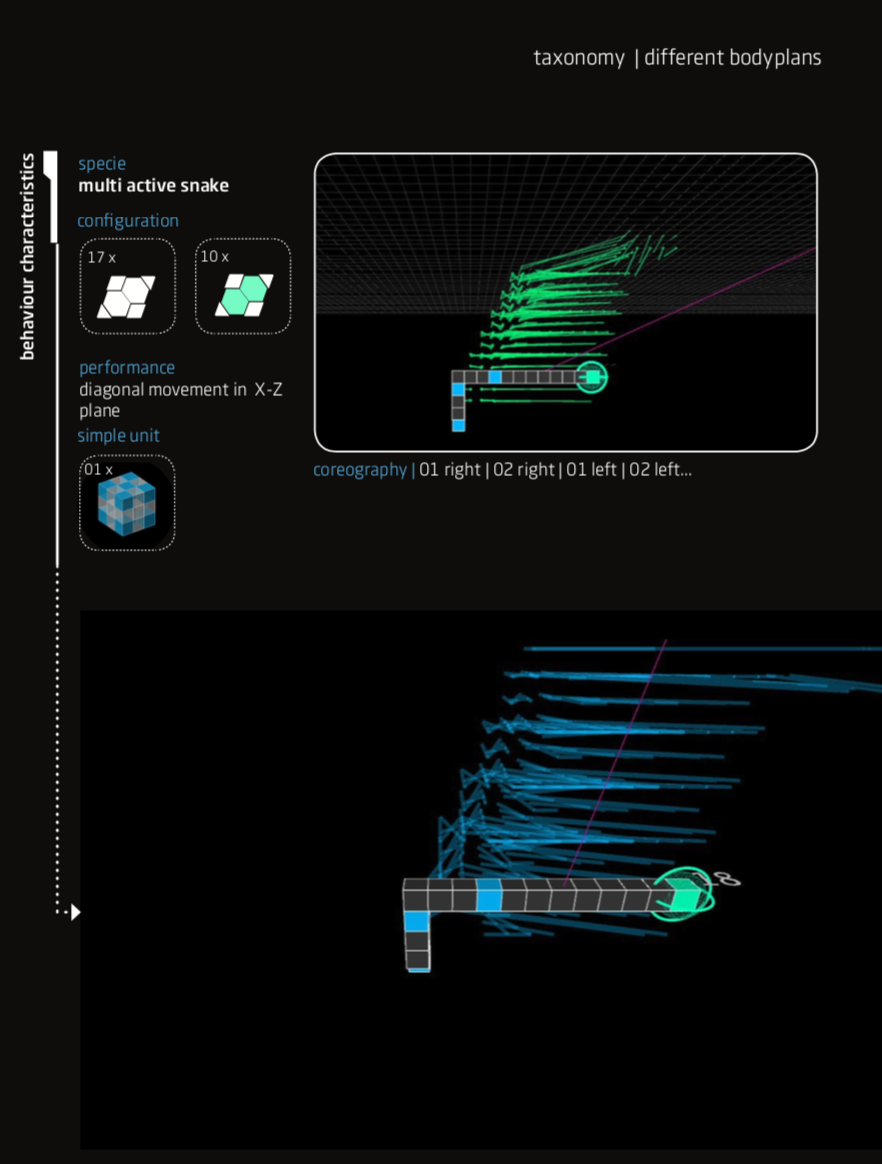
05/20/2018 at 10:25 • 0 commentsbehavioural simulations |
in order to simulate a more automated, goal oriented movement sequence and communication between multiple bodies, a computational abstraction model was developed to emulate the same rotational movement around two simultaneous axis of the physical geometry.
the emulation was the first step into the understanding of the emergent behaviour that could come out of the collective behaviour and interaction of multiple machines. the computational simulations were important to expose the limits and pos- sibilities of the system and the defined families of creatures.
through simple embedded intelligence - such as maximum number of possible arrayed passives without active unit, reference and sticking to the ground, no self and ground interlocking, etc. - and simple goals - like find neighbours, reach or avoid and area – a body autonomously adjusts and optimizes its own movement sequence.
![]()
![]()
![]()
![]()
![]()
![]()
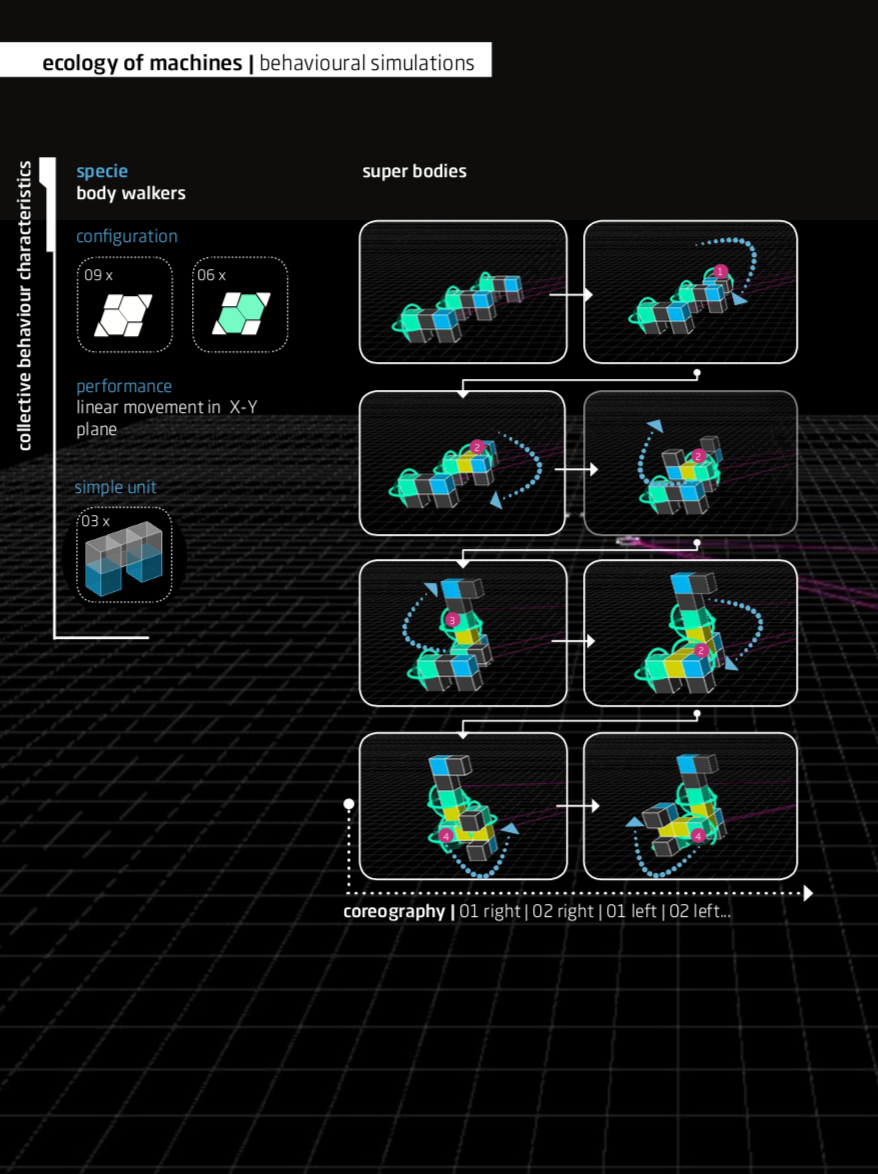
superbody formation |
when multiple bodies connects, their possibilities of action be- comes drastically more complex, joining forces to a combined su- perbody.
in this example, the bodies autonomously adjusts and optimiz- es its own movement sequence in order to combine into a super body, with broadened behaviour for the sake of reaching the goal.
![]()
![]()
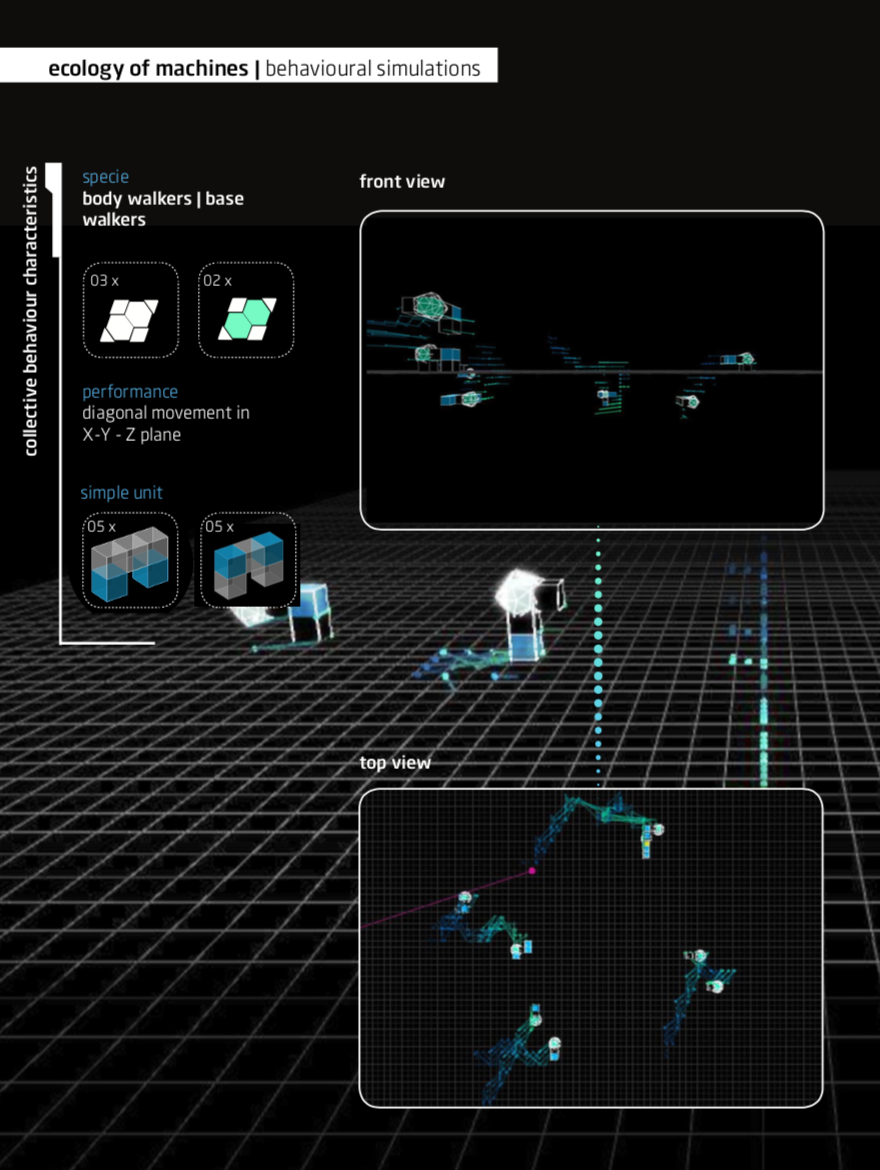
autonomous decision making |
multiple bodies in a field must communicate as a type of aware- ness in order to find its closest and more proeminent neighbour to connect and form a superbody to perform specific tasks, in this case, reach the goal.
it’s possible to observe how different combinations results in dif- ferent behaviours even when they have a common objective
-
MOBILE BODIES
05/20/2018 at 10:19 • 0 comments![]()
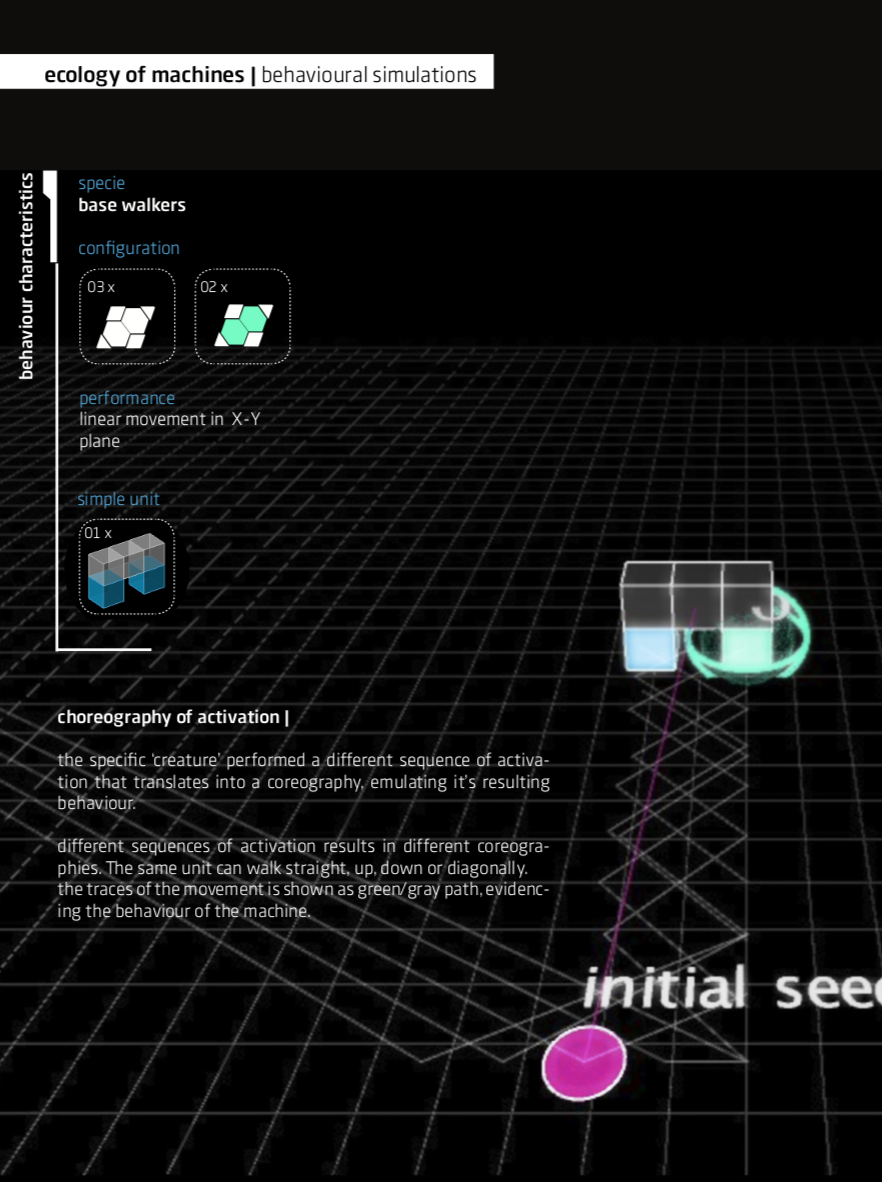
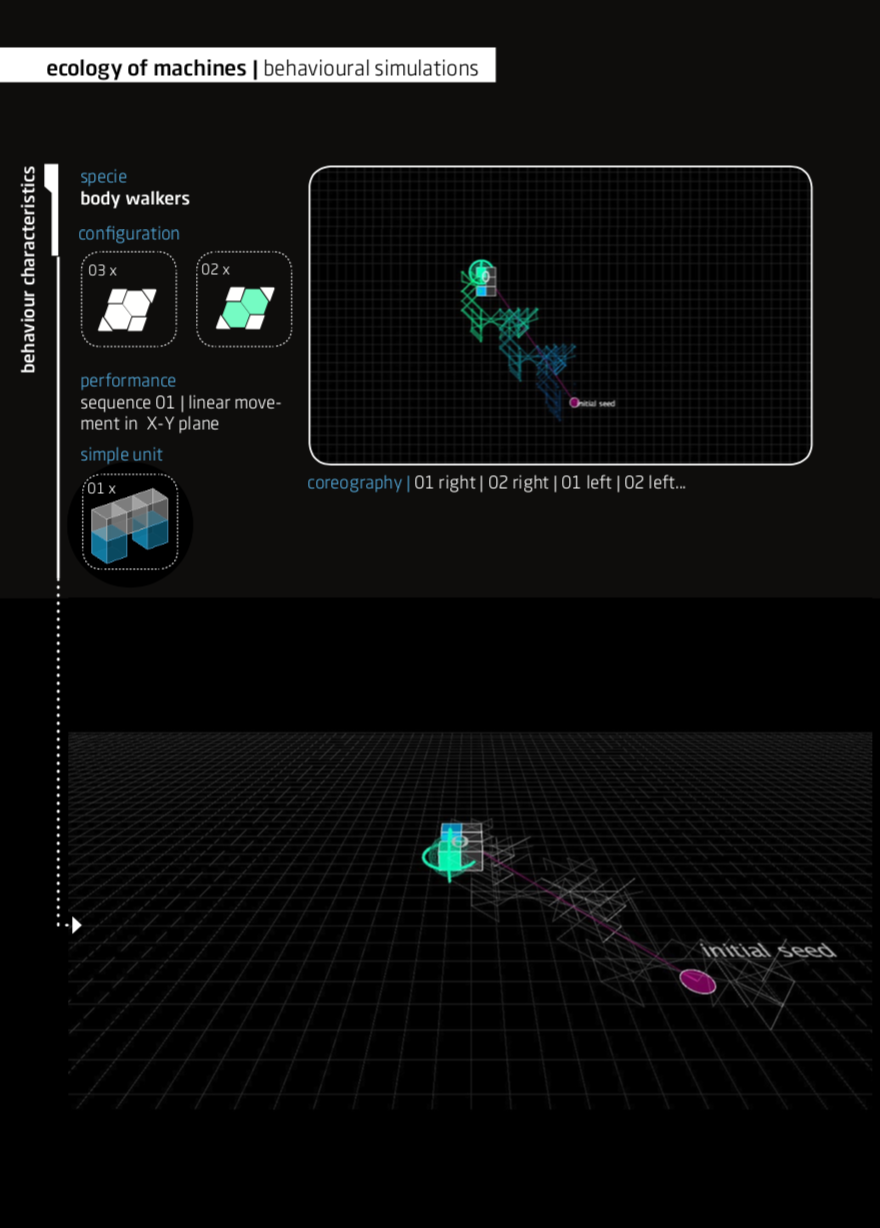
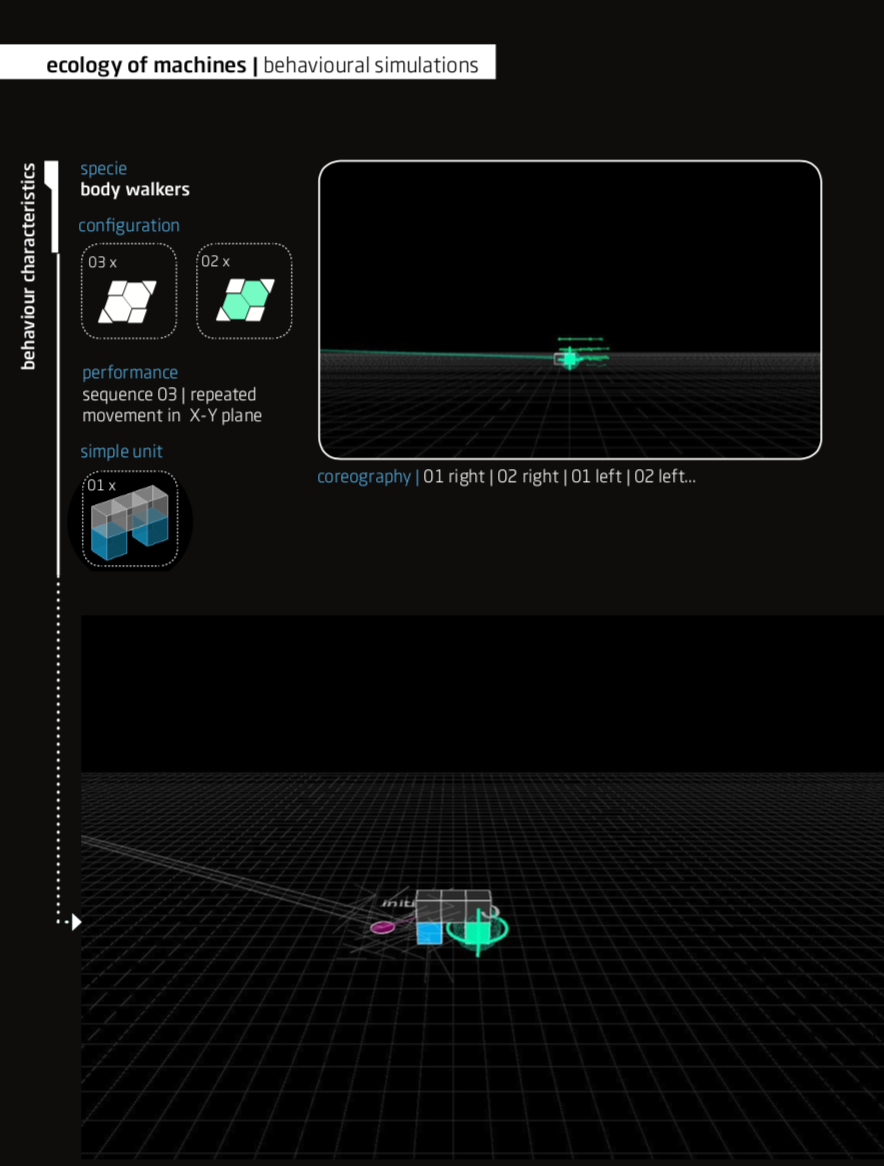
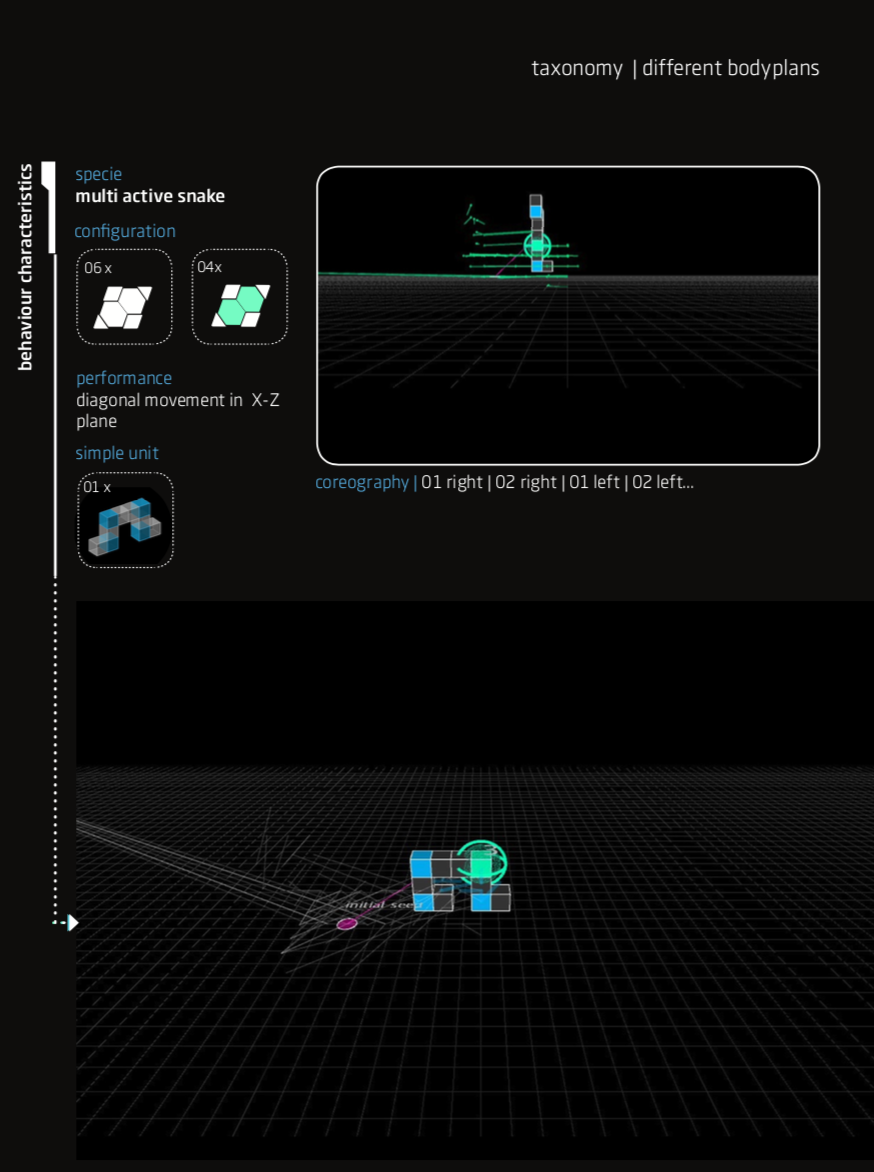
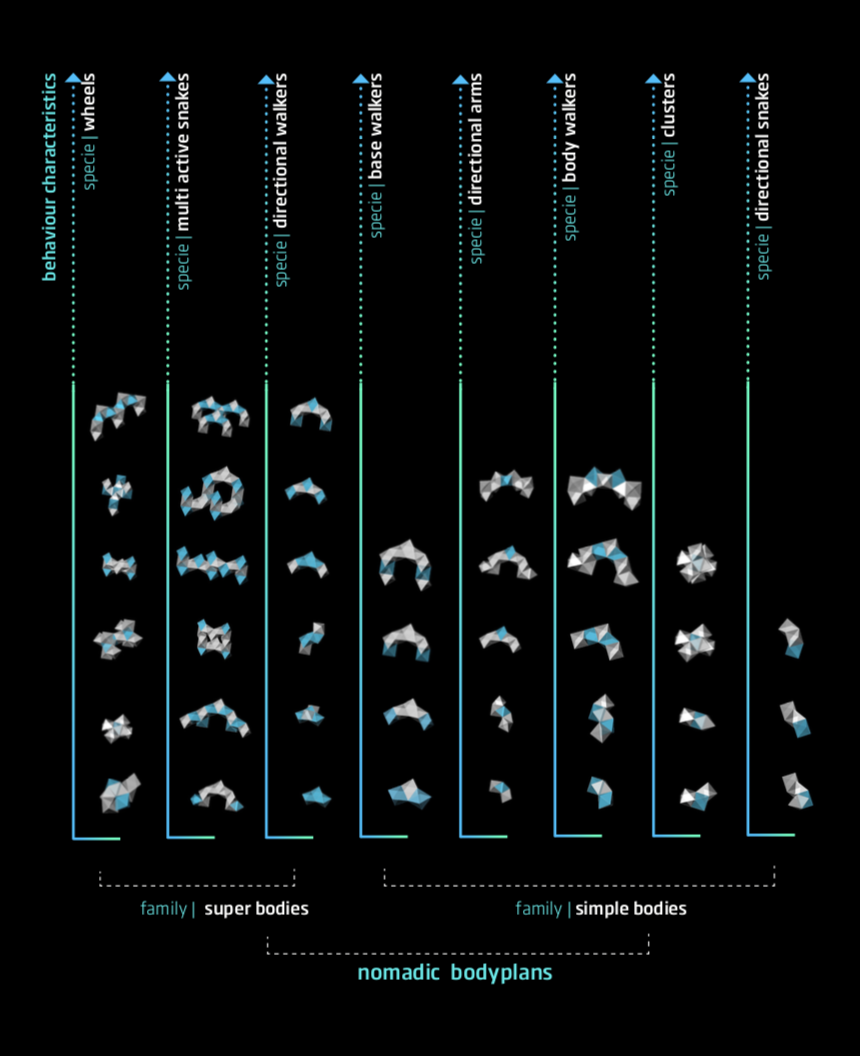
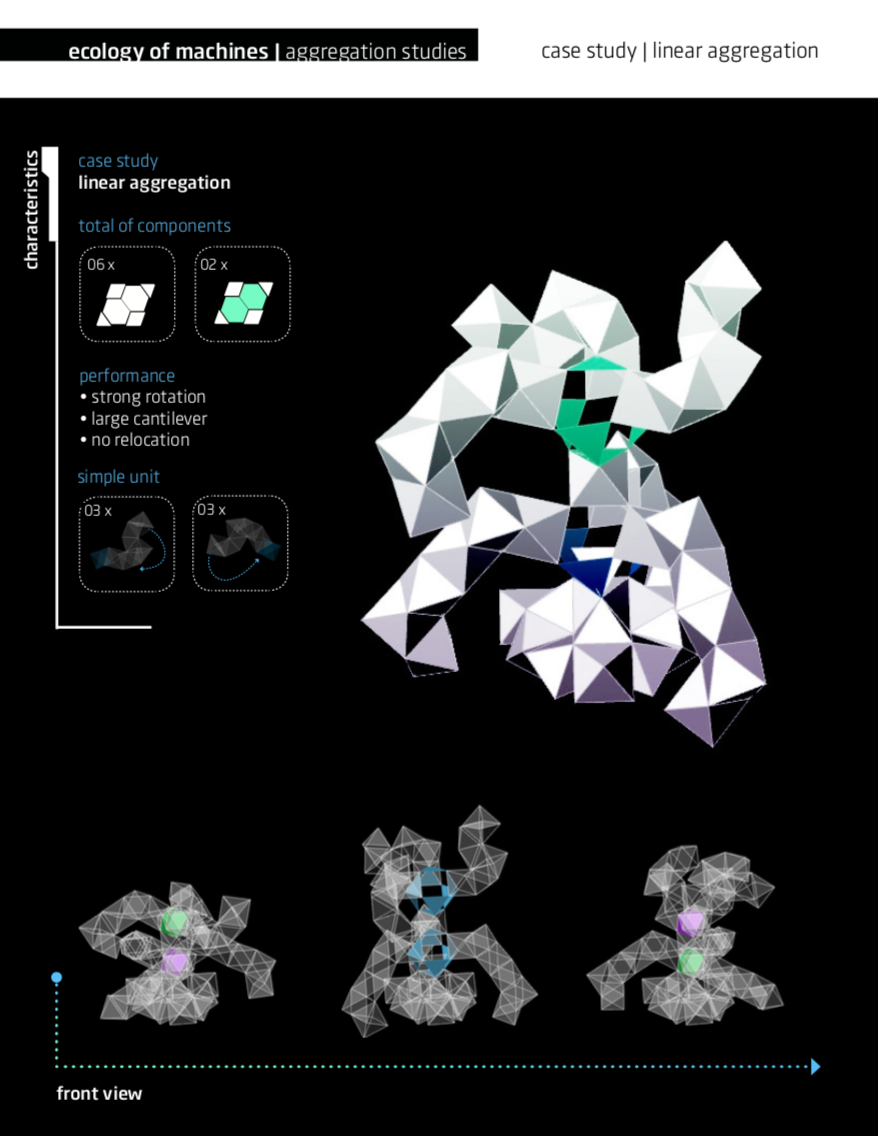
ecology of machines |
initial mobility studies where concerned with different combinations and aggretations of units behave different, how multiple units can take collective decisions and how their flexibility and range of move- ments increases in an emergent way with the complexity of the body- plan.
The notion of a bodyplans are pre-structured organizations that can be categorized in an ecology of machines with creature-like characteristics and highly specific behaviour. ‘Behaviour’ hereby is defined by position and amount of active units and their combination with passive neighbors.
Within the same physical bodyplan, different sequence of activation define dif- ferents sets of behaviours allowing various actions and features for movement and assembly.
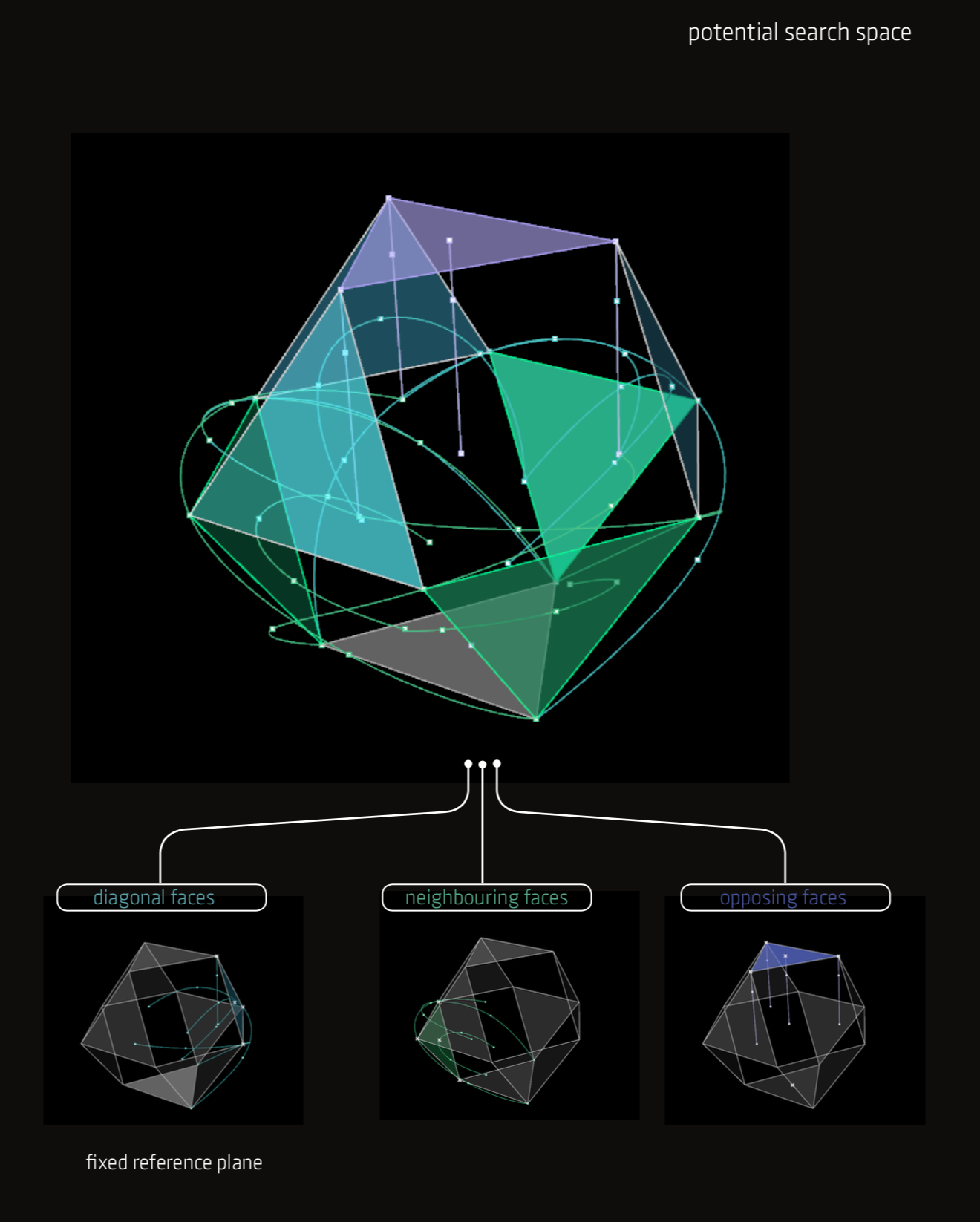
face to face relations |
A series of different relational changes within one unit, from mere linear translating of opposing faces to relocation and rotation of di- agonal faces,drastically changes the units potential search space to
aggregate, allowing new connections. Meaning a local transformation reconfigures the entire existing global system it is connected to in different variations, depending on its connection to neighboring units.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
-
UNIT COMMUNICATION
05/20/2018 at 10:09 • 0 comments![]()
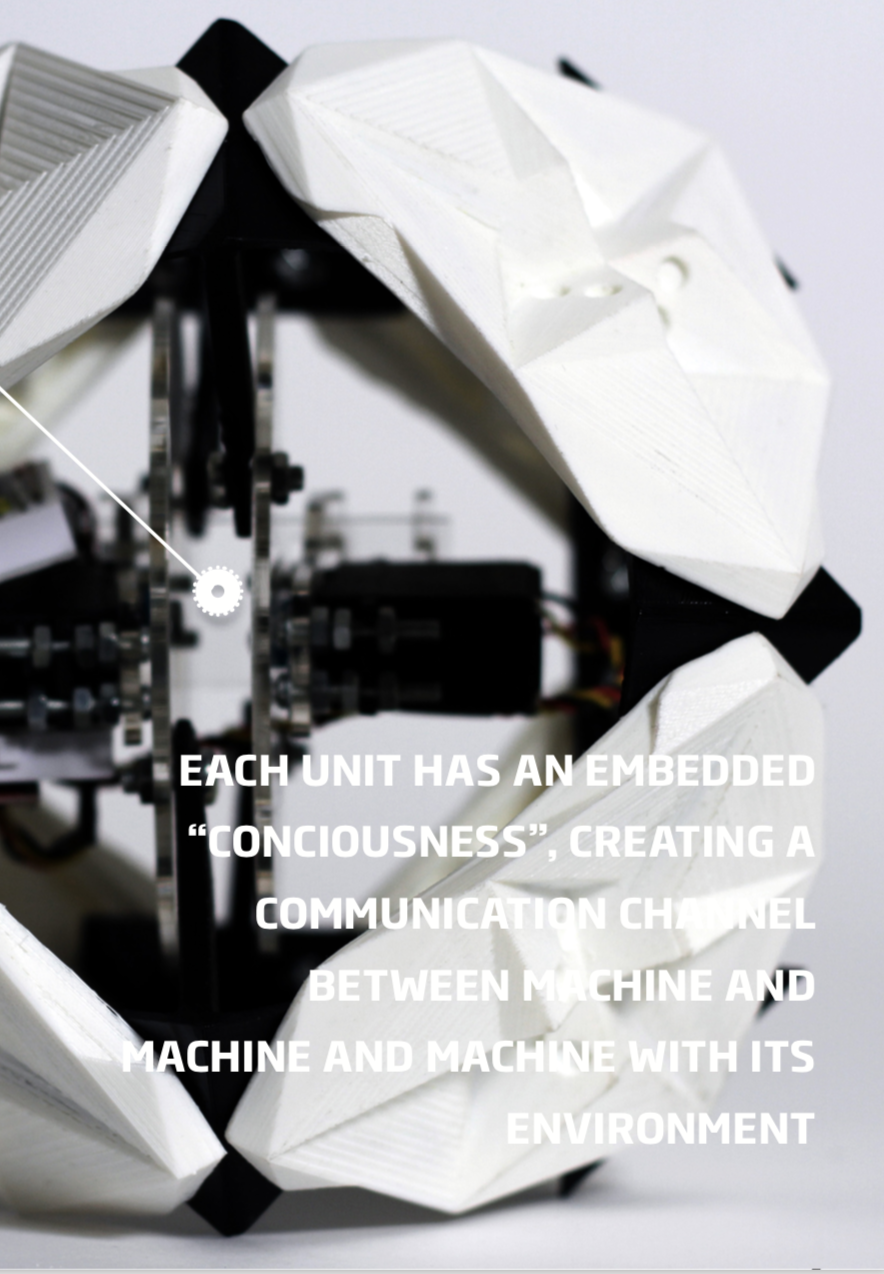
study of emergent behaviour |
a synergetic - i.e. actively transforming - unit has the capability to change not only its own state but when operating in a field re-configure its sur- rounding. in a butterfly effect of onpassing reactions, the local change of the active unit has a global impact on all passive units within the same system.
in a series of physical and digital tests, overall system behaviour was tested to predict and control local and global changes of organization.
![]()
![]()
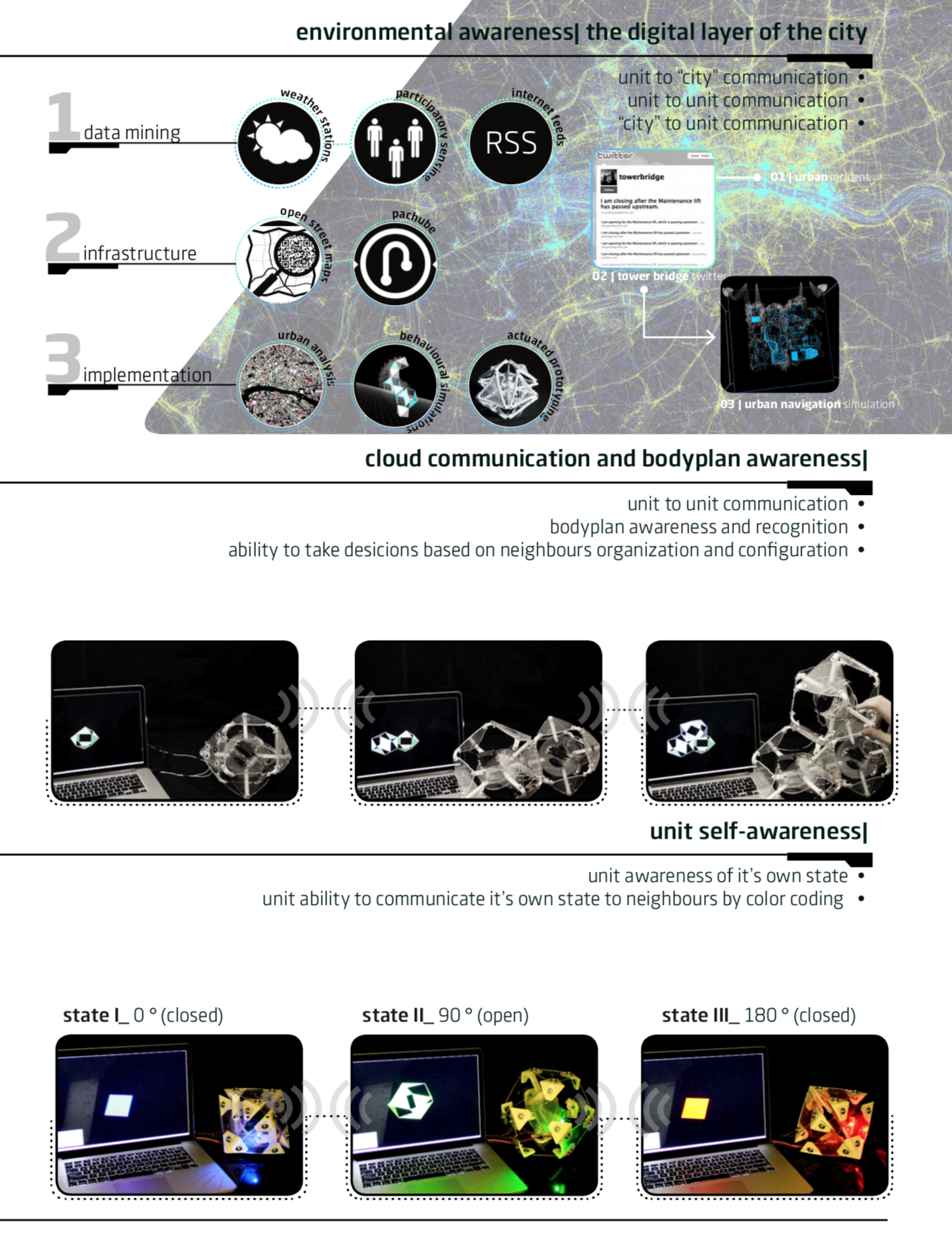
the “conversation theory” |
In order to understand and emulate the behavior and communication of the units and stablishing a parallel to Gordon Pask’s Conversation Theory - where inter- actions leads to construction of knowledge - it was developed simulations of autonomous behavior in a digital environment, creating a framework for the simulations and prototypes to work together, from physical to digital syncing their behaviour both to achieve control and as well to visualize its self-aware- ness.
Units would search for and specific goal, with the ability of adapting and making local decisions to achieve that.
The ability to communicate with the external world, but also to sta- blhish a relation between machines is of main of main importance for the development of an intelligent system, that could learn and adapt.
The main goal was to develop strategies for collective behaviour, starting with state indication and recognition, By face to face communication units are capable to re-construct their bodyplan like “chinese whispers” each identifying the states of position of their neighbour.
![]()
![]()
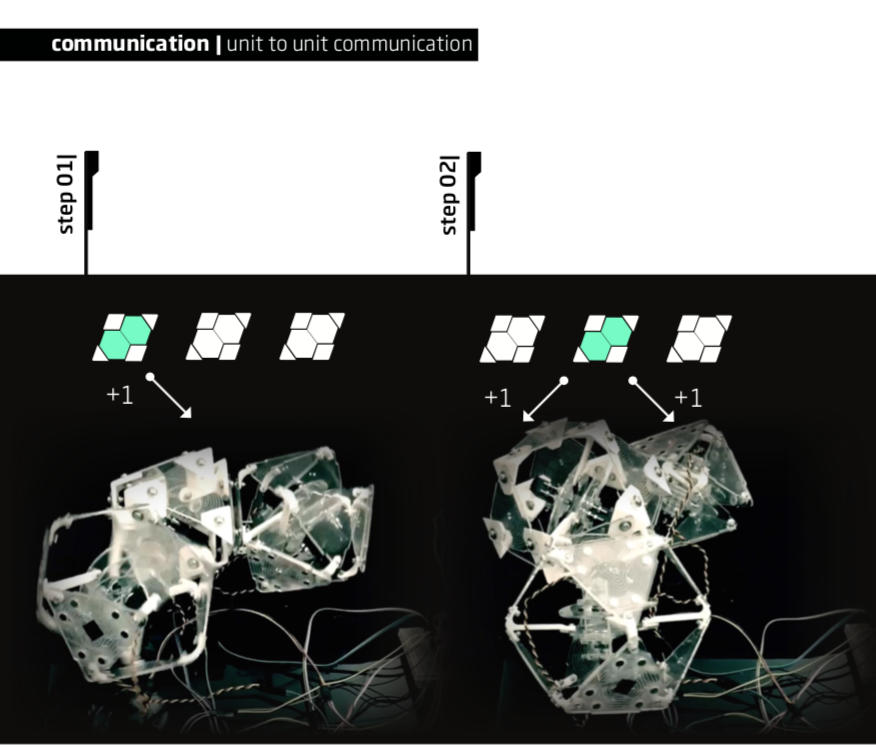
generative communication
Once the framework to allow the communication from unit to unit, unit to computer and unit to environment was settled, the behaviour and ability of the units to take decisions could be explored.
To introduce the idea of generative communication and decision making it was developed an algorithm based in the C.A. logics, that allows units to respond to neighbours behaviors. The signal is passed from unit to unit, triggering a chain reaction of relational unit movement, by changing the state and consequent behaviour of the next one (i.e. “state +1”).
The idea of a generative communication system explicitated the need of a greater un-
derstanding and subsequent control of the collective behaviour of the units. Specific sequences of activation could generate different patterns of movement, which led to a more specific study of these patterns, that was translated into constrains for the system.
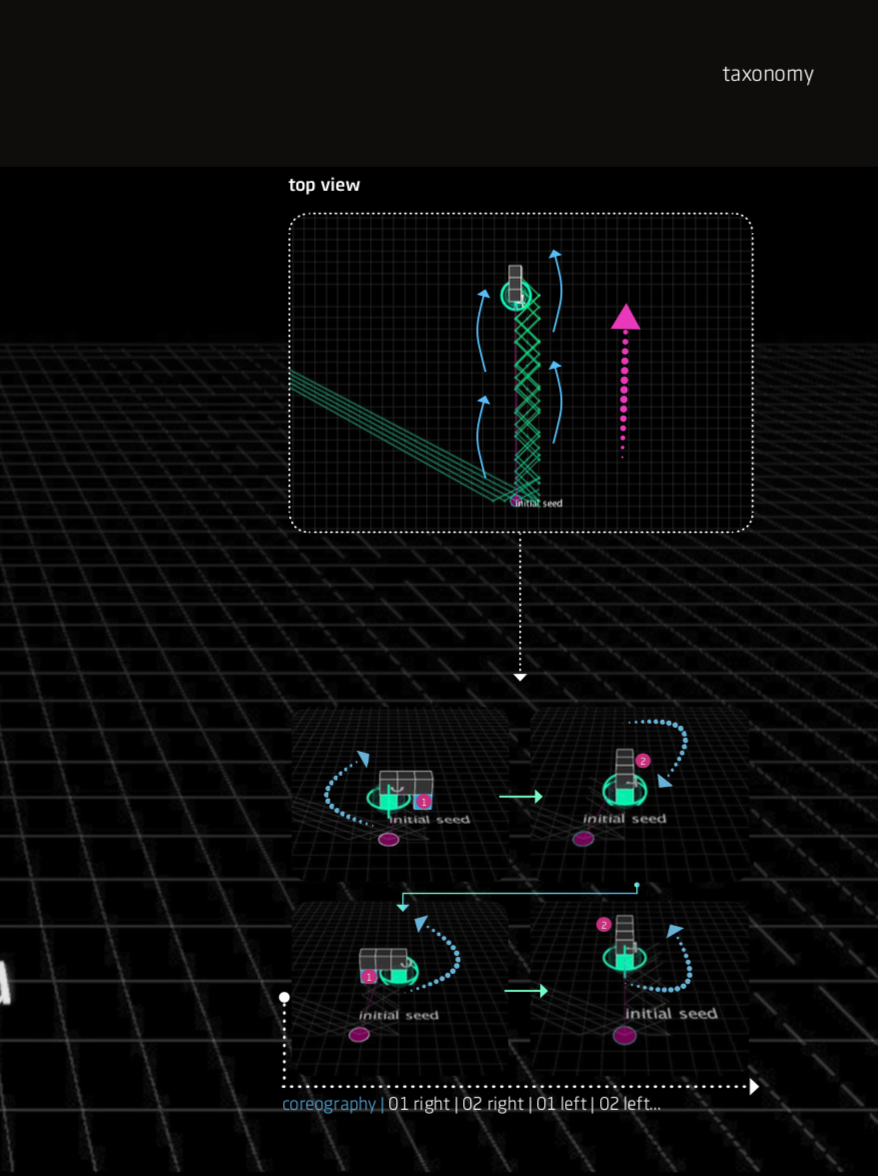
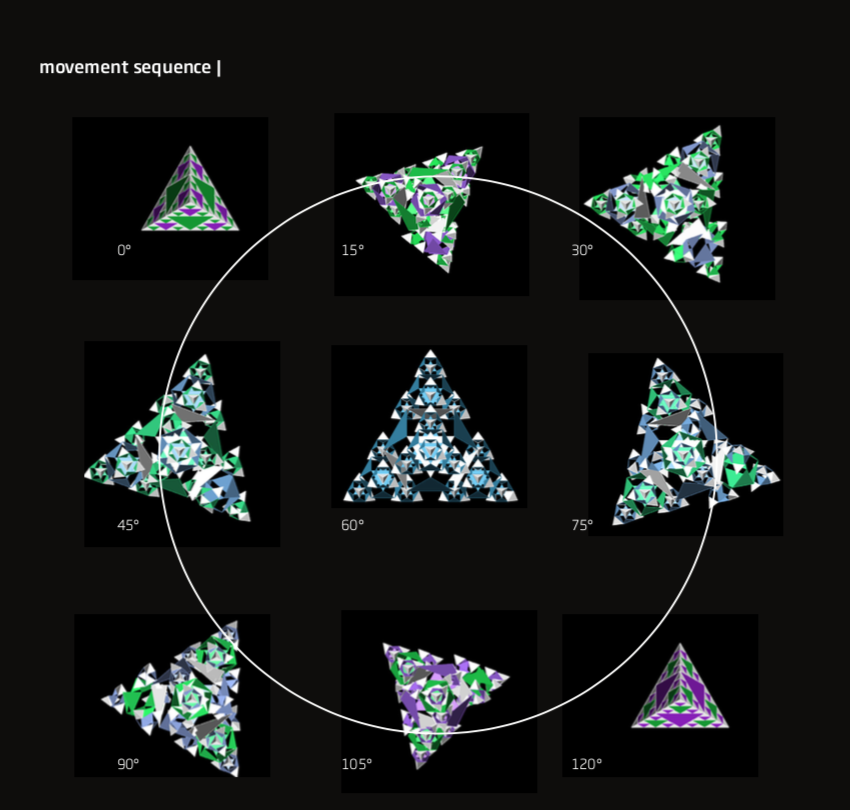
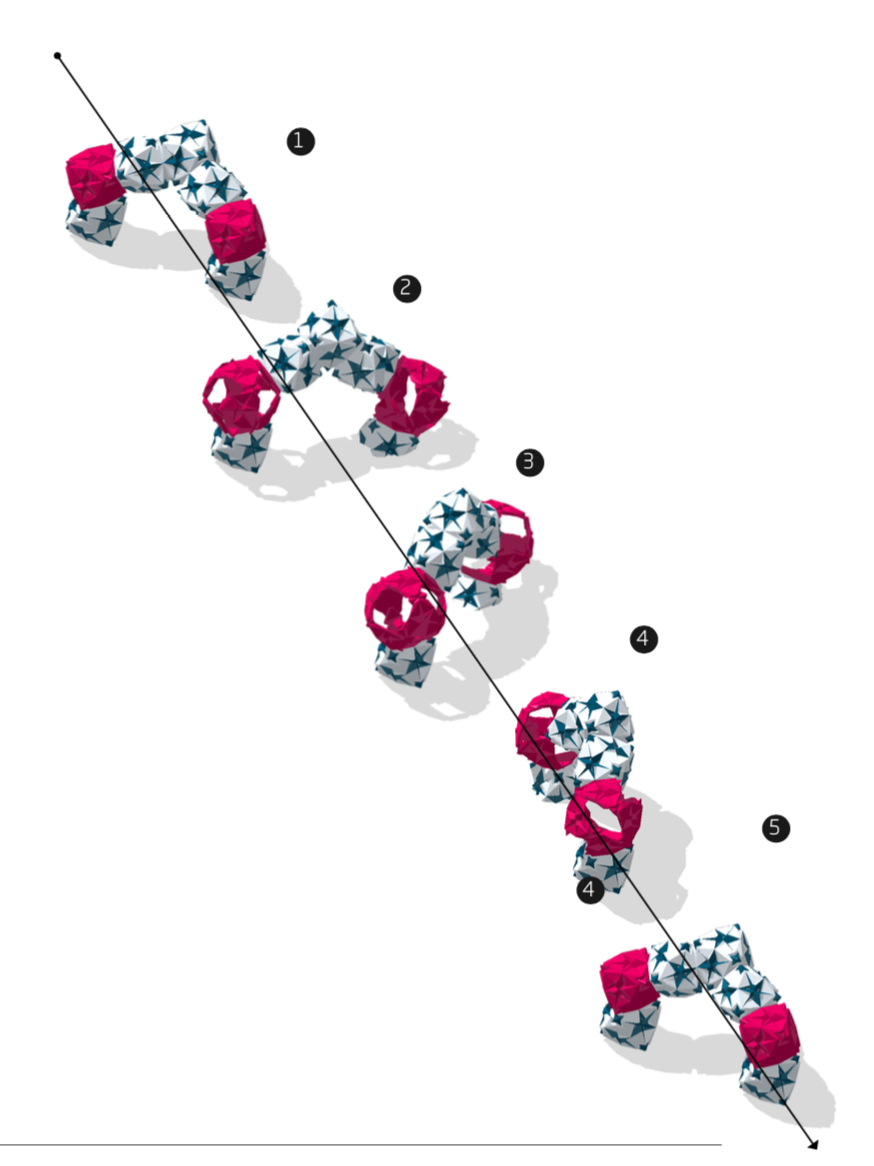
In order to achieve movement in different directions, like directional movement, rota- tion, spiraling, etc., different choreography patterns were studied. These specif- ic coreographys become an important feature of the research, as bodyplans behaviour are directly related to the sequence and method of activating units.
![]()
![]()
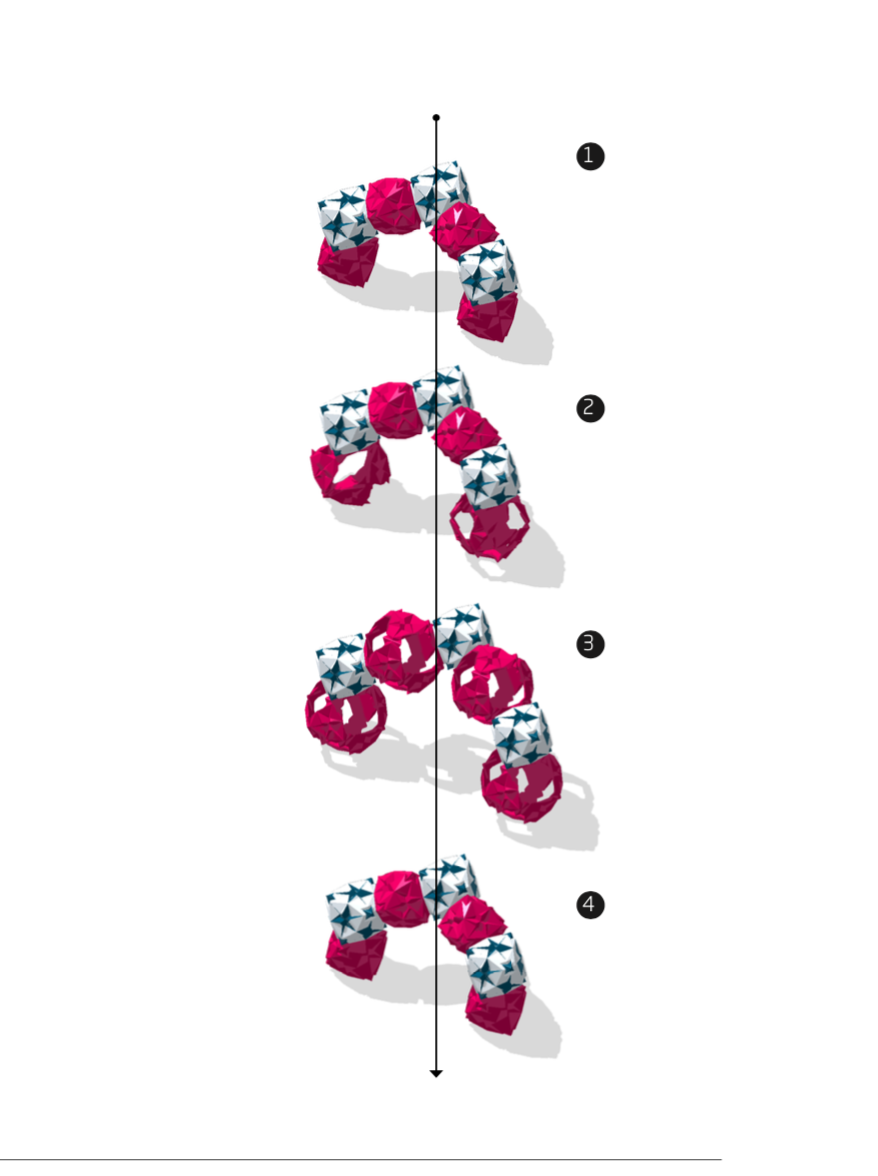
unit communication | generative responding
Similar to cellular automata logics, each unit has three different states, that chang- es the relations through the grid. To trigger a chain reaction, the first unit receives an input signal that gets passed on to neighboring units that reacts differently, depending on it’s current state but also the state of it’s neighbours.
The logics of changing states considers that each step should be “state +1”, which triggers an endless loop, where units that reachs state “3” (180°) draws back to state “2” and then to state “1”.
![]()
![]()
-
TECHNICAL DRAWINGS
05/20/2018 at 09:59 • 0 comments![]()
![]()
![]()
![]()
![]()
-
FACE TO FACE CONNECTION
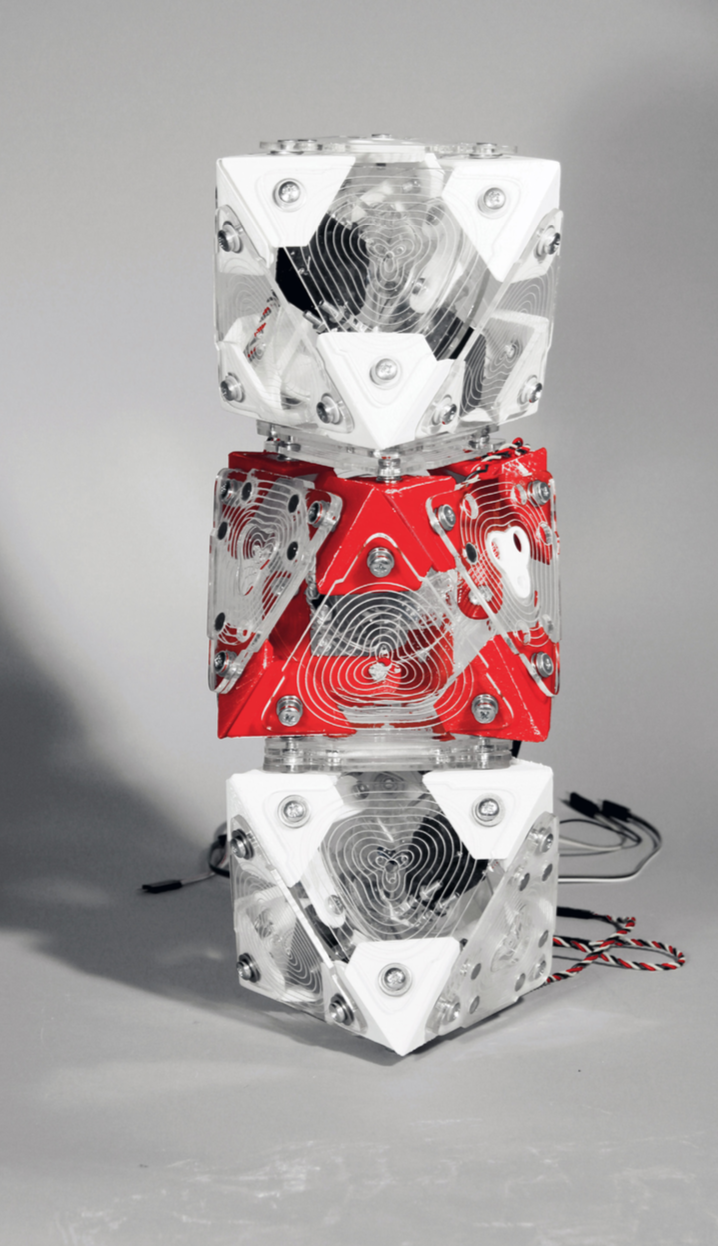
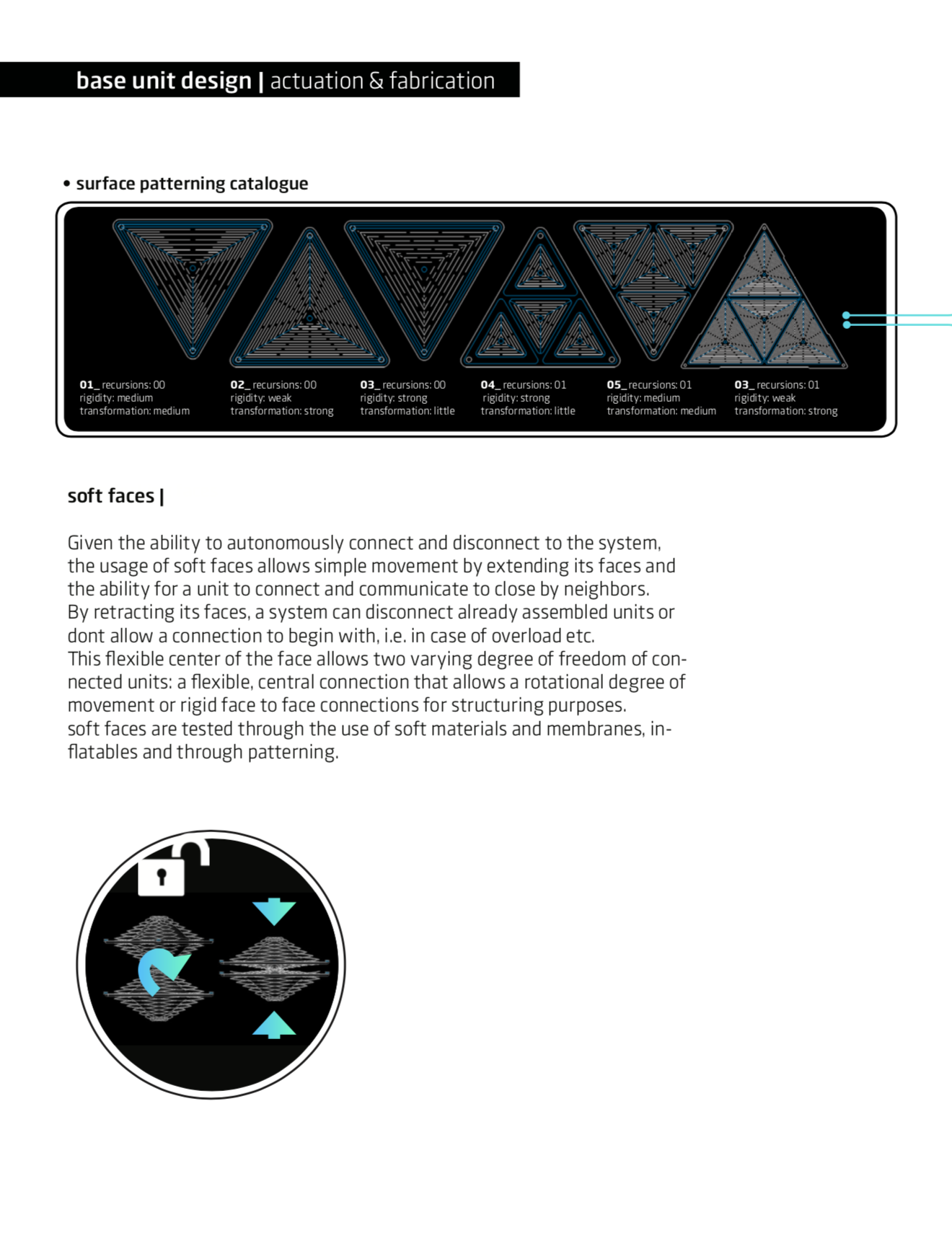
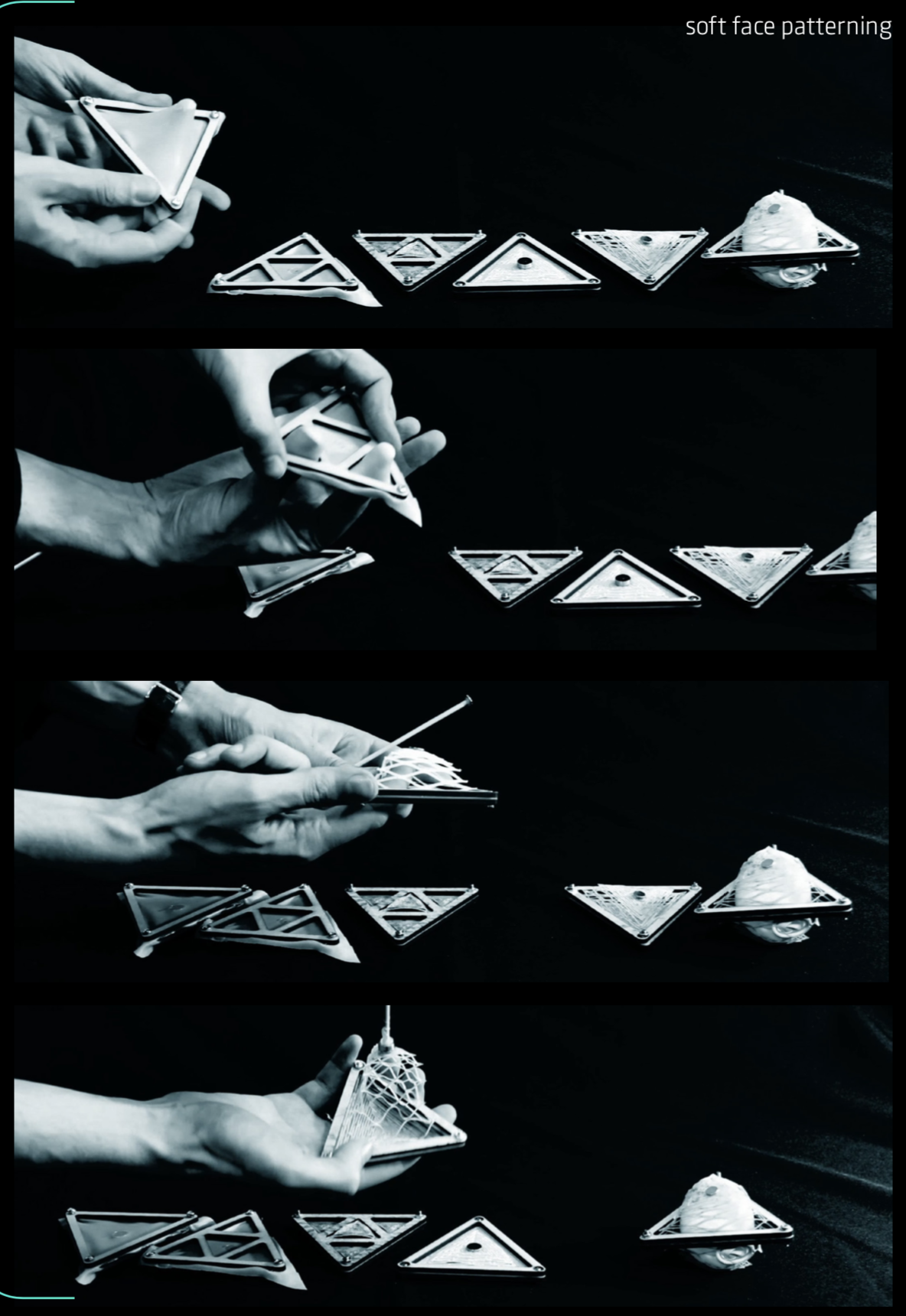
05/20/2018 at 09:54 • 0 commentssoft faces |
Given the ability to autonomously connect and disconnect to the system, the usage of soft faces allows simple movement by extending its faces and the ability for a unit to connect and communicate to close by neighbors. By retracting its faces, a system can disconnect already assembled units or dont allow a connection to begin with, i.e. in case of overload etc.
This flexible center of the face allows two varying degree of freedom of con- nected units: a flexible, central connection that allows a rotational degree of movement or rigid face to face connections for structuring purposes. soft faces are tested through the use of soft materials and membranes, in- flatables and through patterning.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
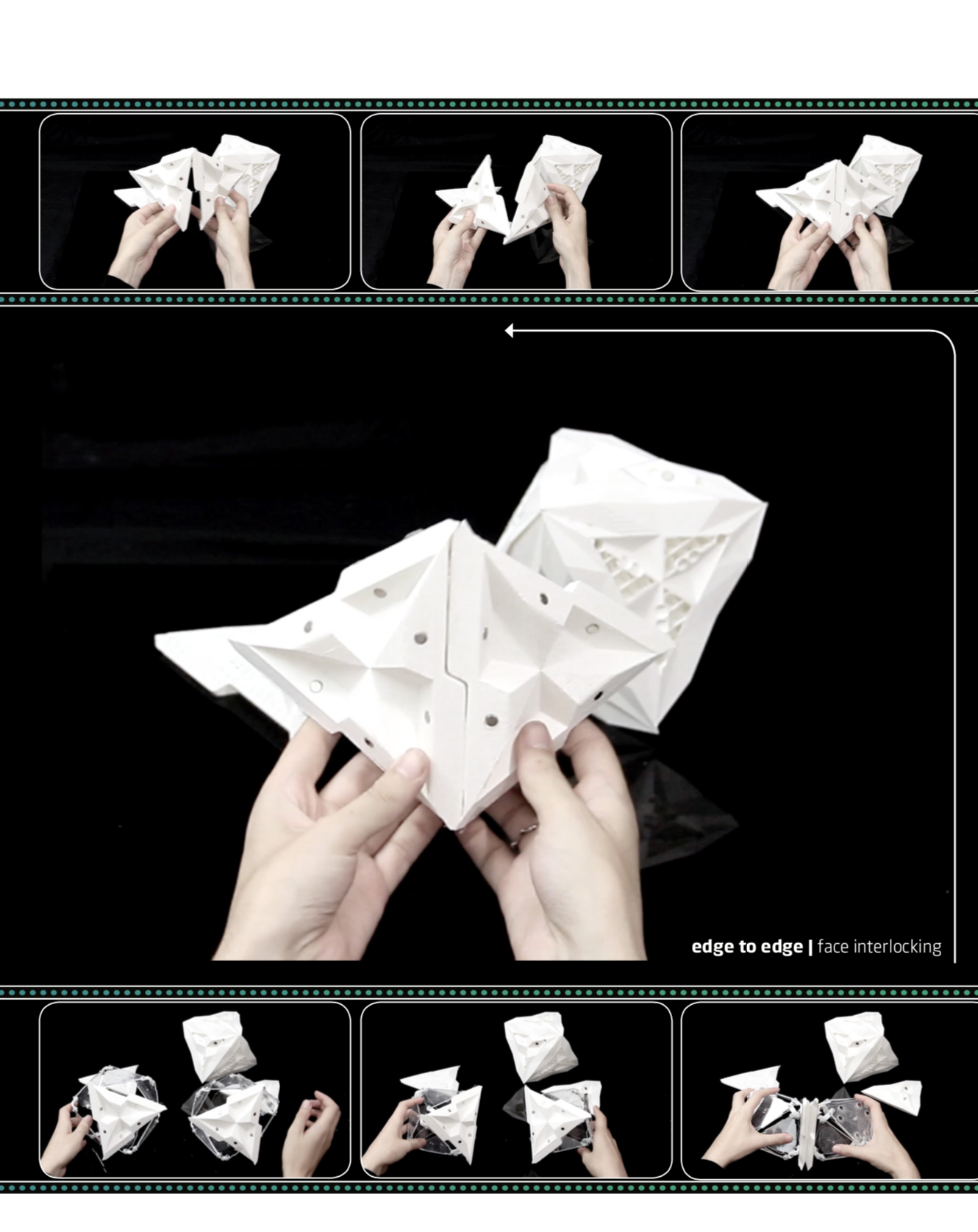
unit to unit interface |
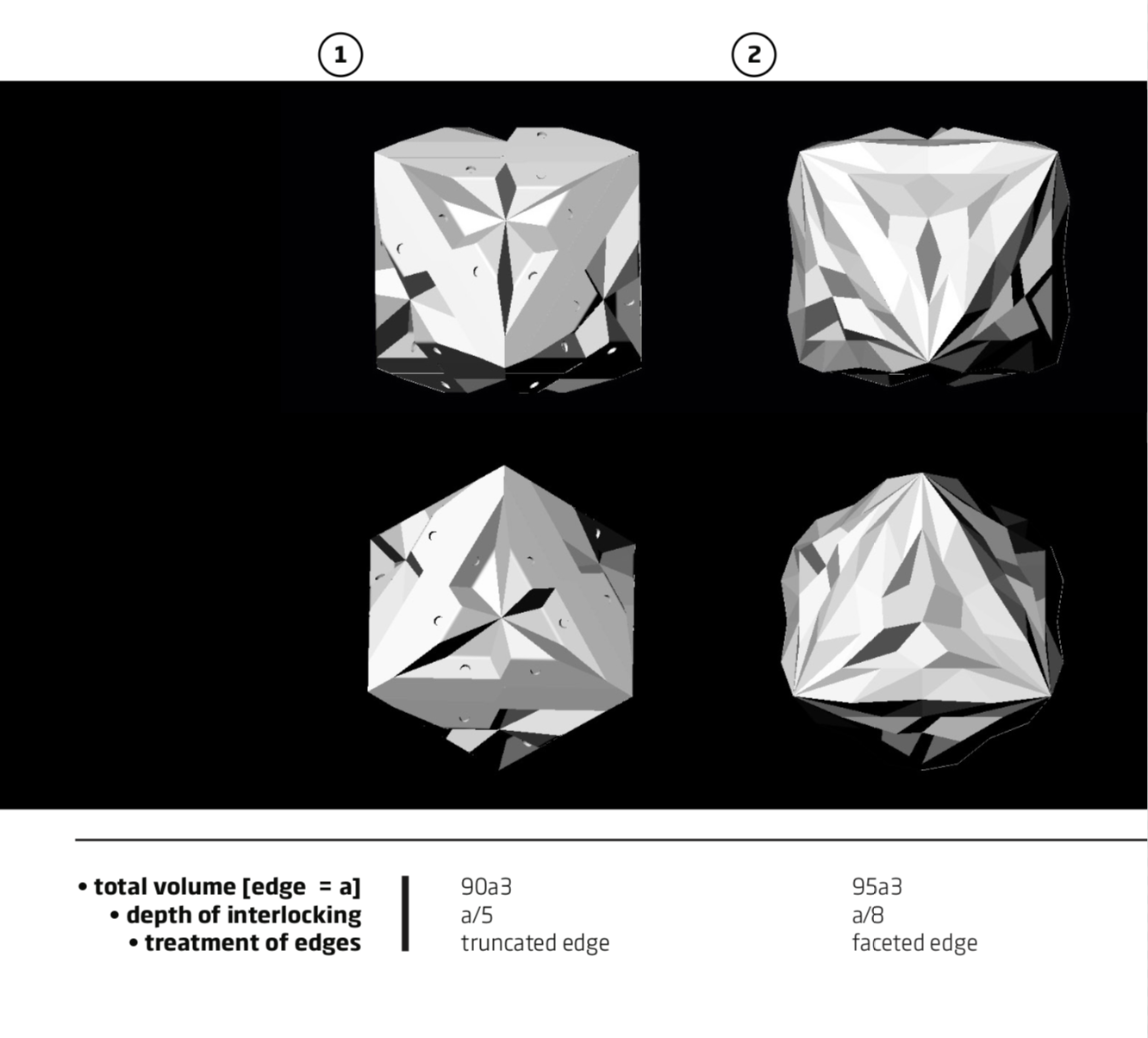
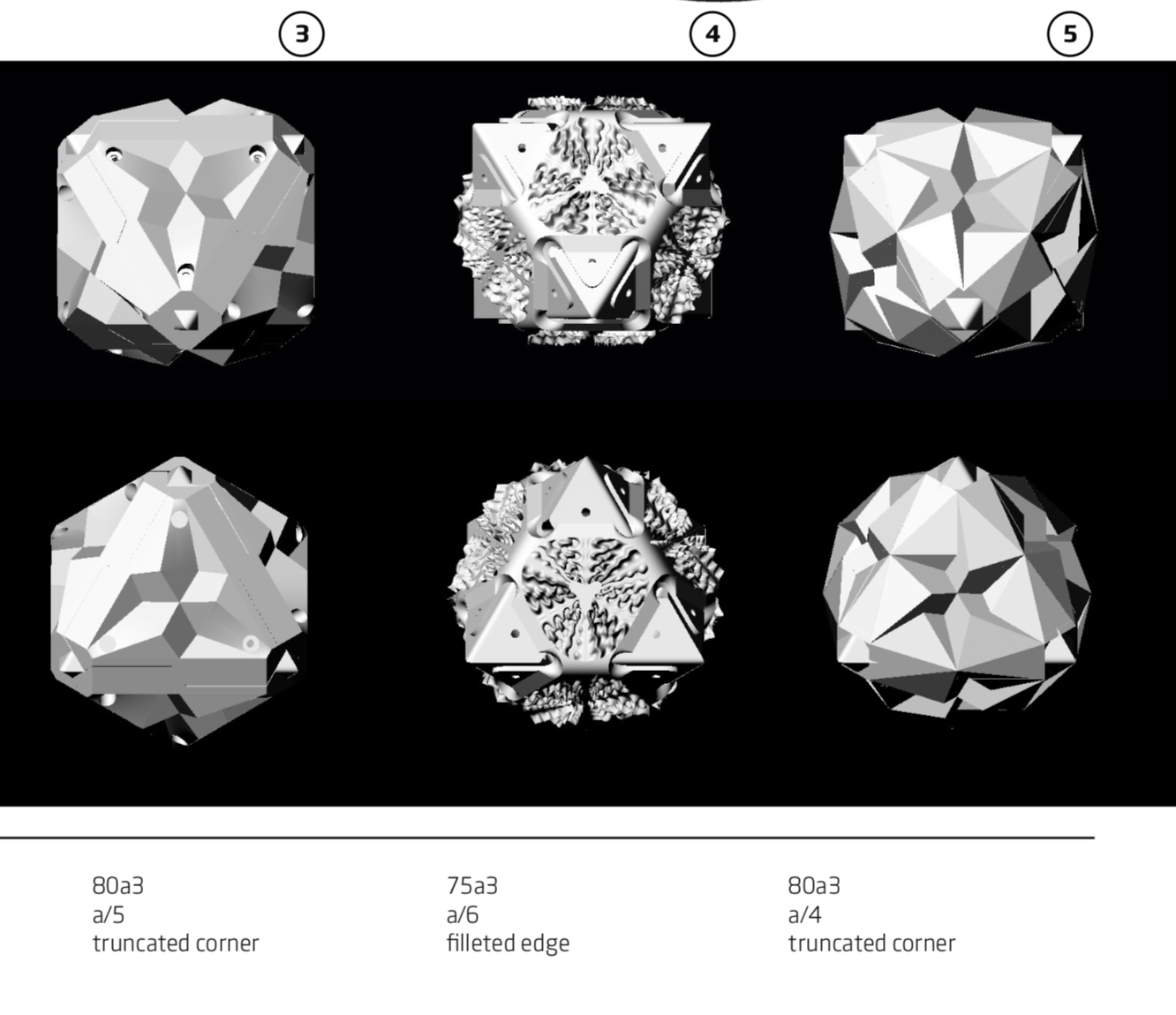
Looking for a plug’n’play mechanism to connect multiple units, the units faces serve as interface with structural function. All flat-faced experiments with magnets proved strong in direct horizon- tal contact but break under shearing force, esp. while lifting and cantilevering.
Positive-negative shapes applied to all faces work interlocking geometry, hindering shearing movement by strongly interweave two units and their connecting forces. The principle of interlocking is not only used from unit to unit but also from face to face within a unit for a more stable structure in closed state.
![]()
![]()
![]()
![]()
![]()
-
Initial Prototyping
05/20/2018 at 09:25 • 0 commentsInitial Prototyping |
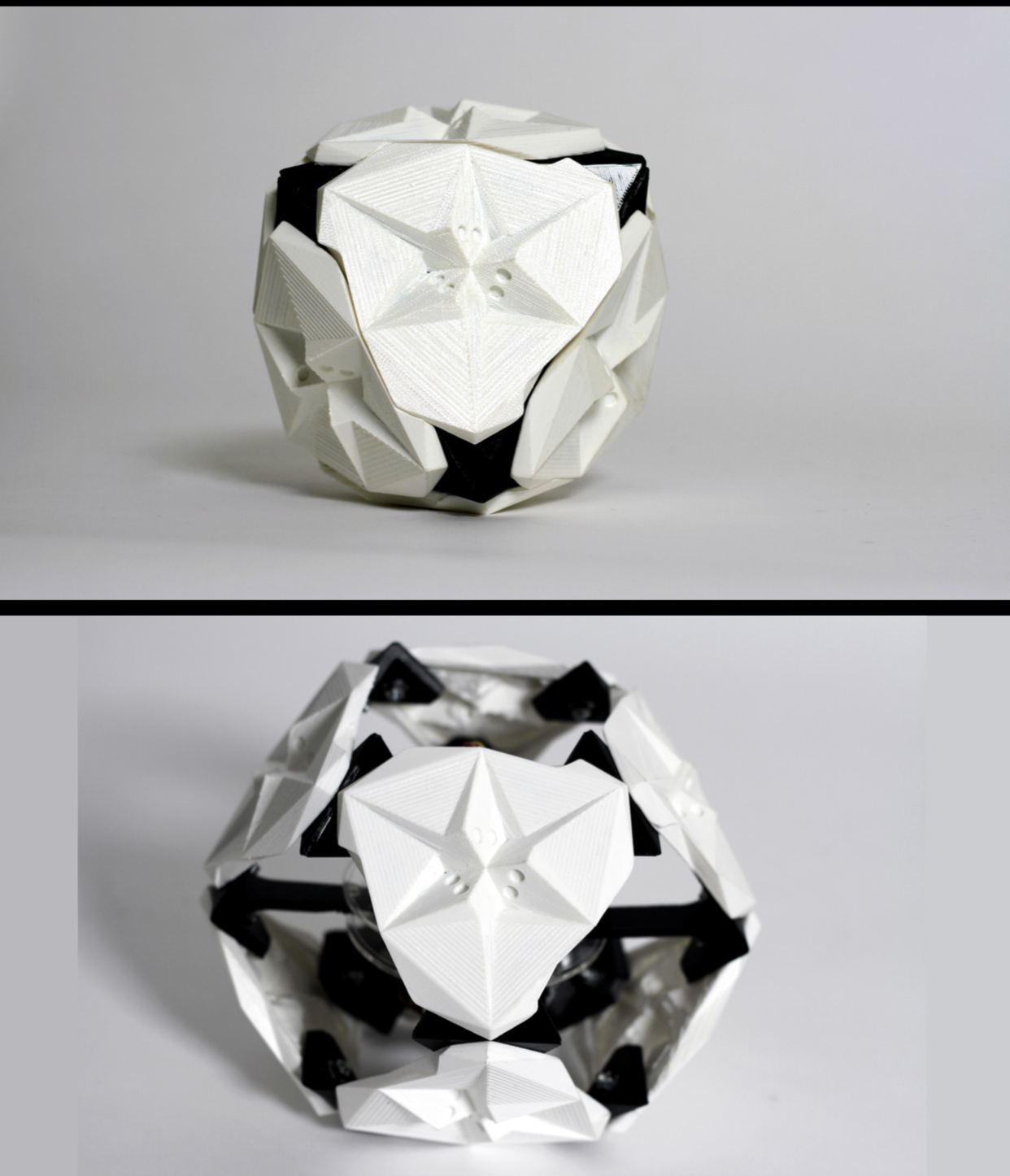
Exploring ways of how a single module can be enabled to show behavior and autonomy and due to the space-packing, self-structuring and kinetic requirements of our design proposal, our research is grounded in the world of polyhedra and transformational geometry. The initial research and formfinding was grounded in specific polyhedra, their packing and decomposition logics and kinetic qualities - exploring how a geometry can transform and what are the implications on its connected surrounding
![]()
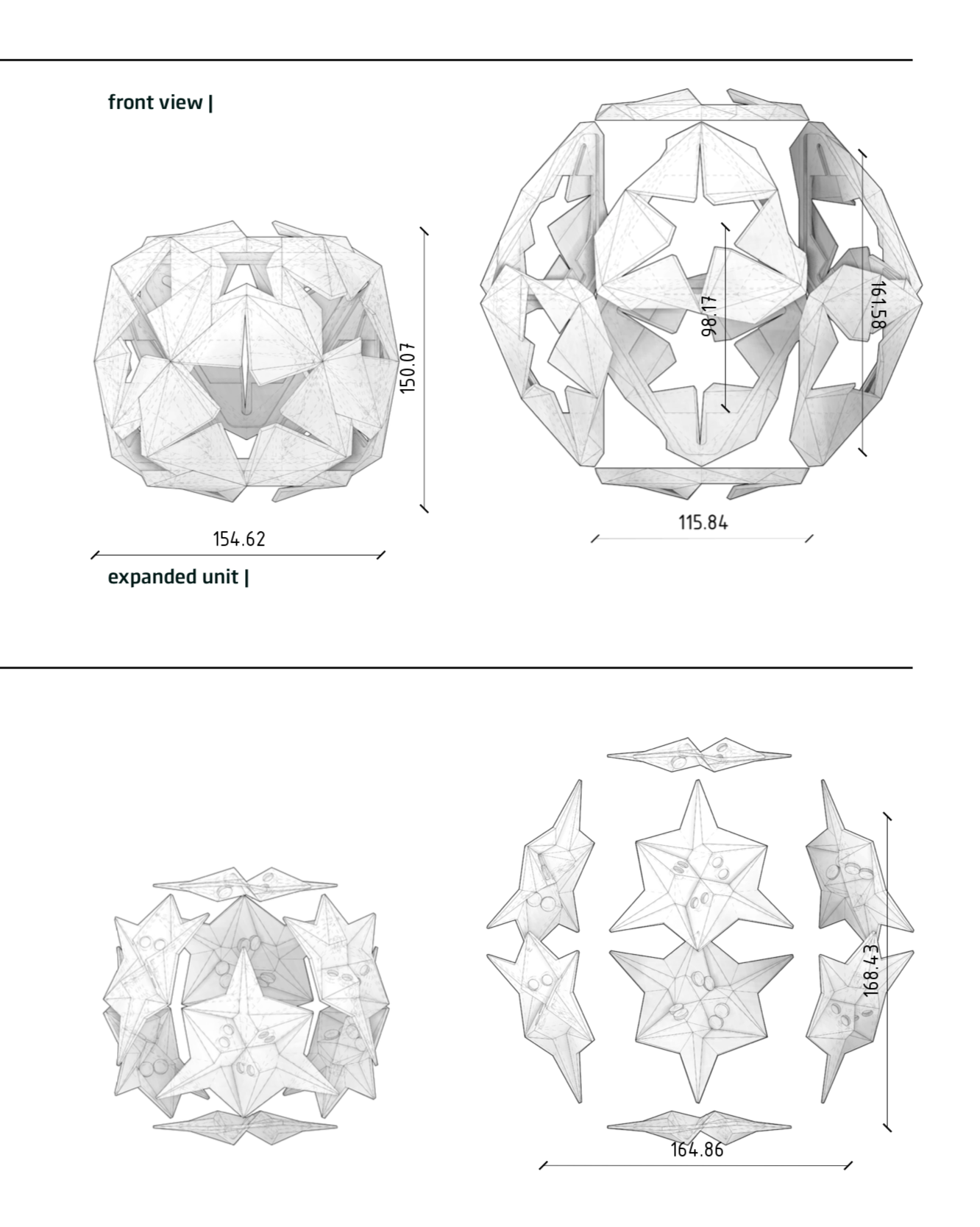
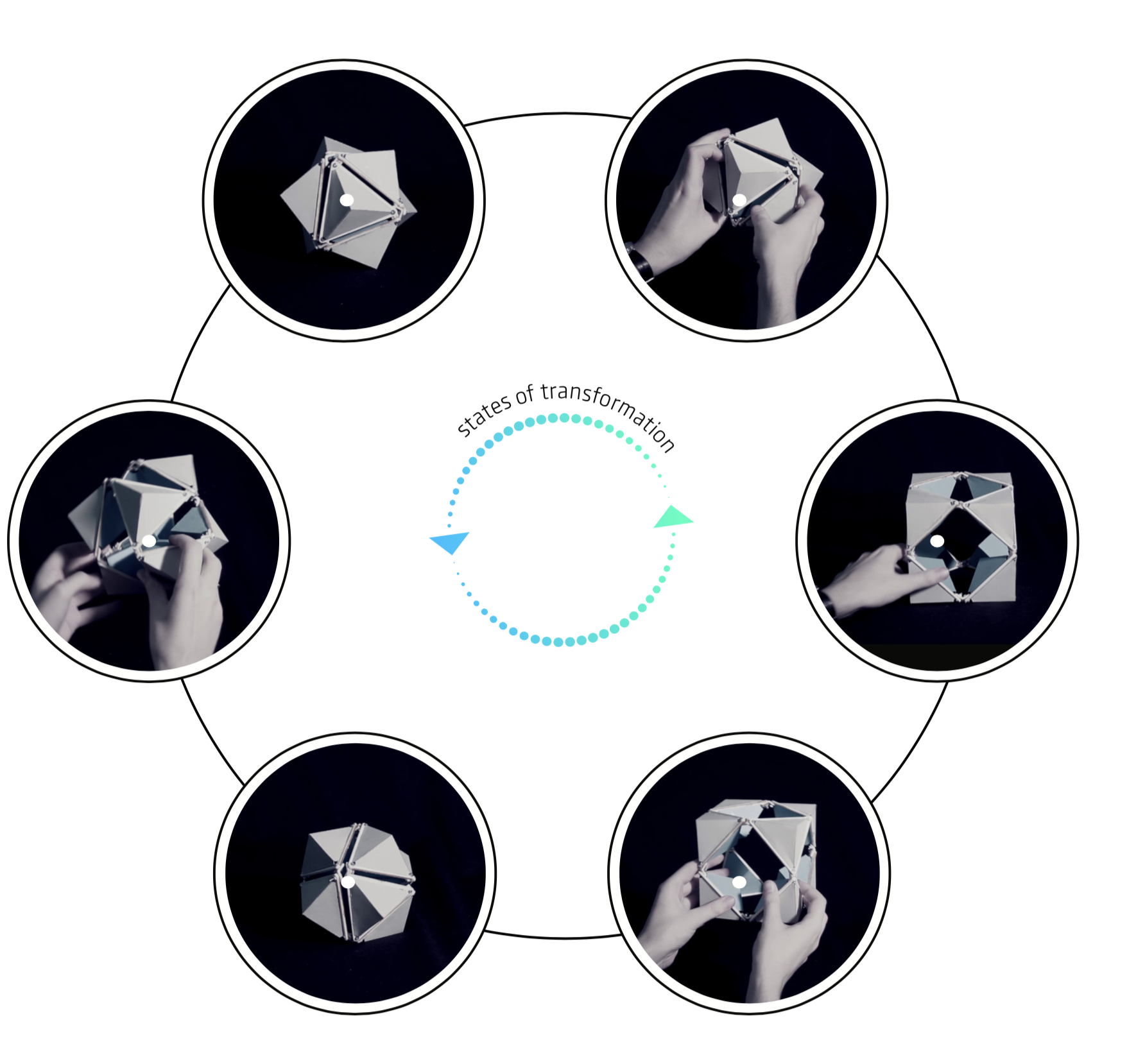
the unit |
The unit, the system’s main building block, is based on a simple rotational movement of the faces of an octahedron around the vertices of its neighbor. Within this transformation, the unit starts from octahedral state, expands to an icosahedron, cuboctahedron, back to icosahedron an and octahedron again - expanding up to 1.5x in size, and changing both orientation and location of all its faces.
An analysis of the movment shows a series of different relational changes within one unit, from mere linear translating of opposing faces to relocation and rotation of diagonal faces. Changes that af- fect the units potential search space to aggregate, allowing new con- nections, resp. a local transformation reconfiguring other connected structures.
![]()
![]()
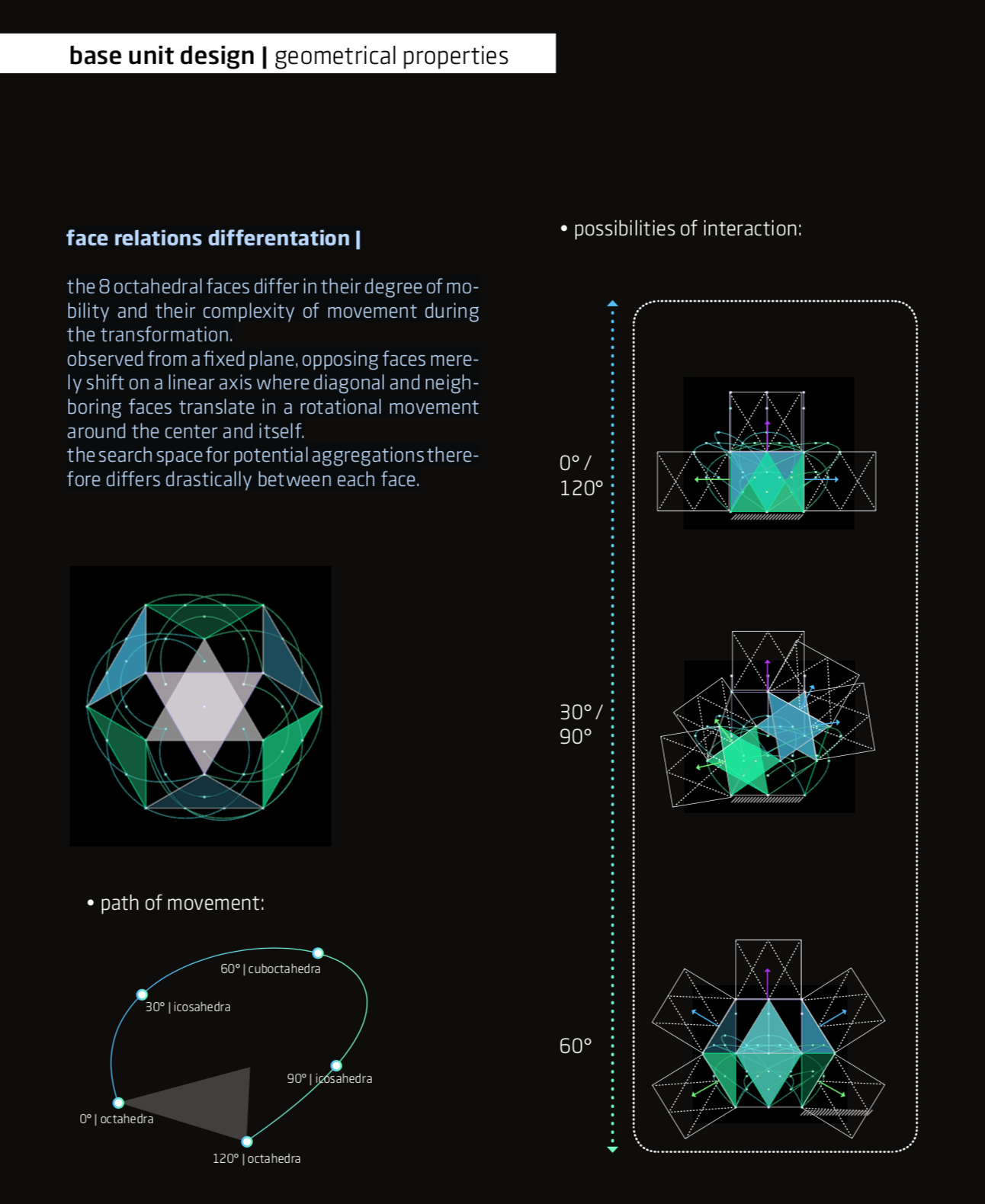
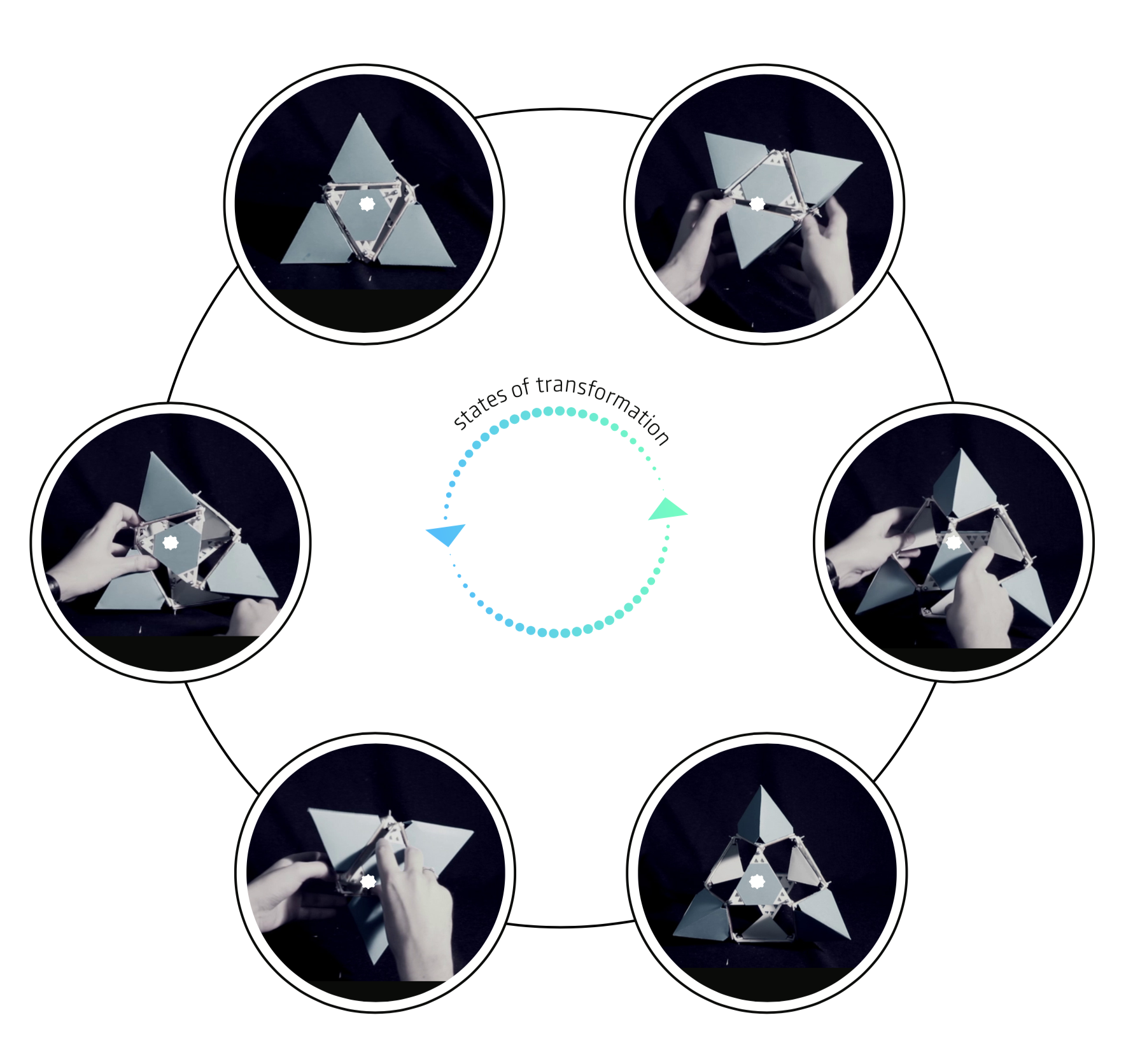
face relations differentation |
the 8 octahedral faces differ in their degree of mobility and their complexity of movement during the transformation. observed from a fixed plane, opposing faces mere- ly shift on a linear axis where diagonal and neigh- boring faces translate in a rotational movement around the center and itself.
the search space for potential aggregations there- fore differs drastically between each face.
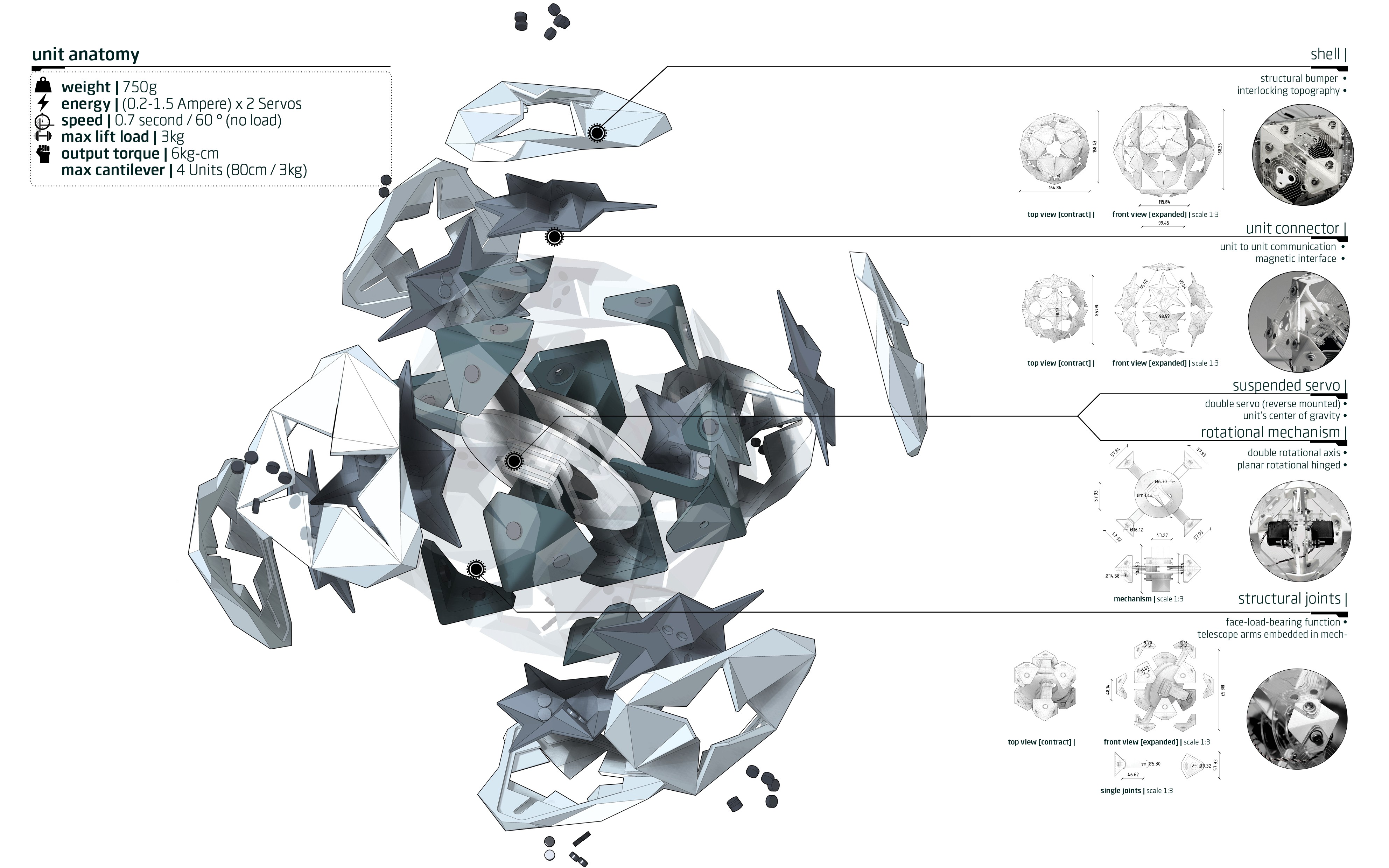
In order to actuate the unit and enable it to act autonomous, different approaches from introduction of flexible unit to unit interfaces to internal mechanics and controls were explored.
The main unit has several design features embedded that enable it to act autonomously and perform in a plug’n’play manner, The external shell follows two main function of Unit-to-Unit Interface: Construction & Communication between units, Construction is concerned with Connecting & Disconnecting and Interlocking between a Unit’s faces, Communication with Body-Plan Awareness and sequencing.
A single unit can be fabricated with simple diy components all parts except the electronics can be printed within 12 and assembled within 2 hours with any desktop 3d printer.
![]()
![]()
noMad - Open Source Self-Assembly System
Self-assembling modular robotics utilizing machinic behaviour & real-time decision making to enable architecture with a sensory system.