 Christoph
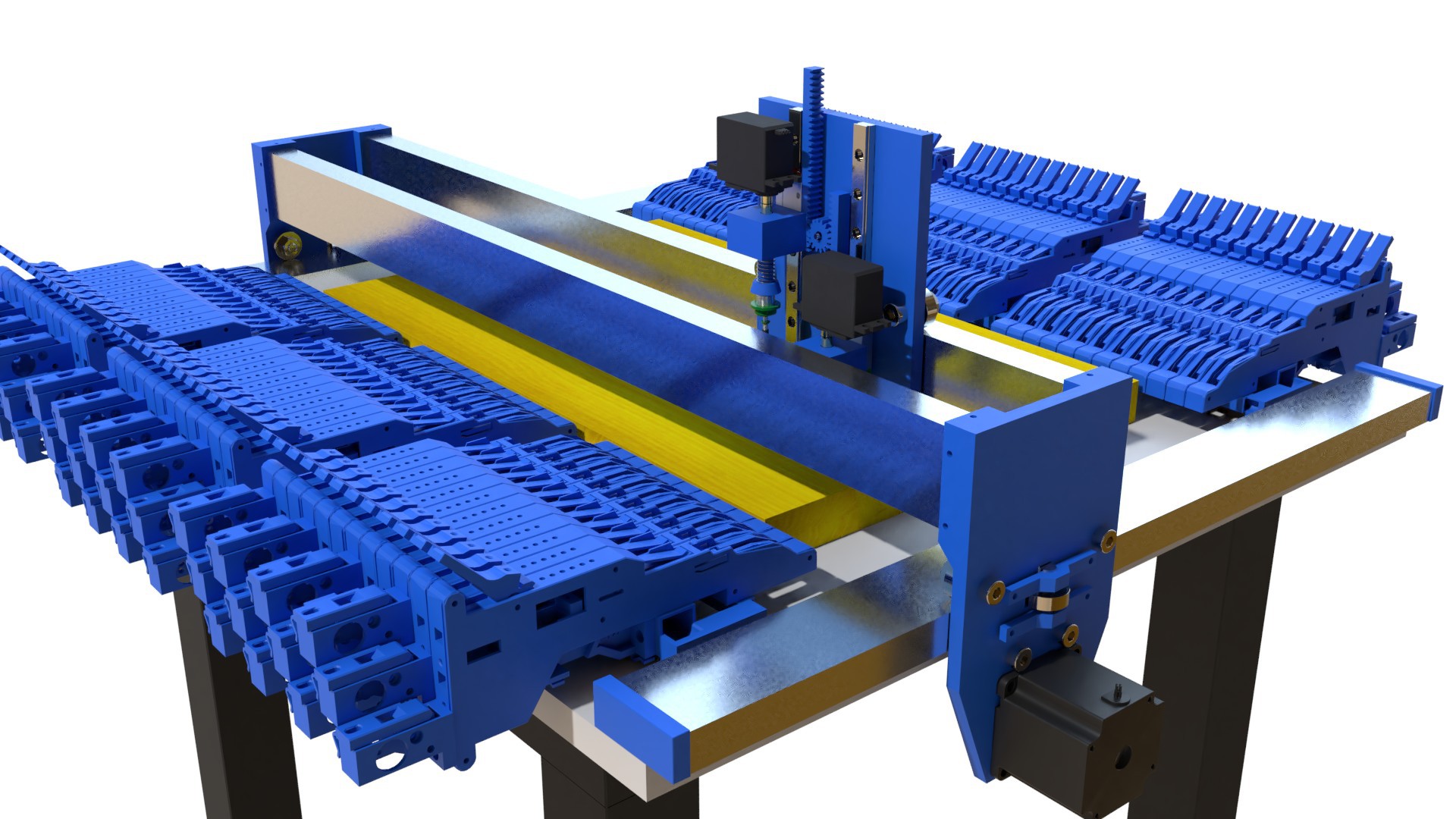
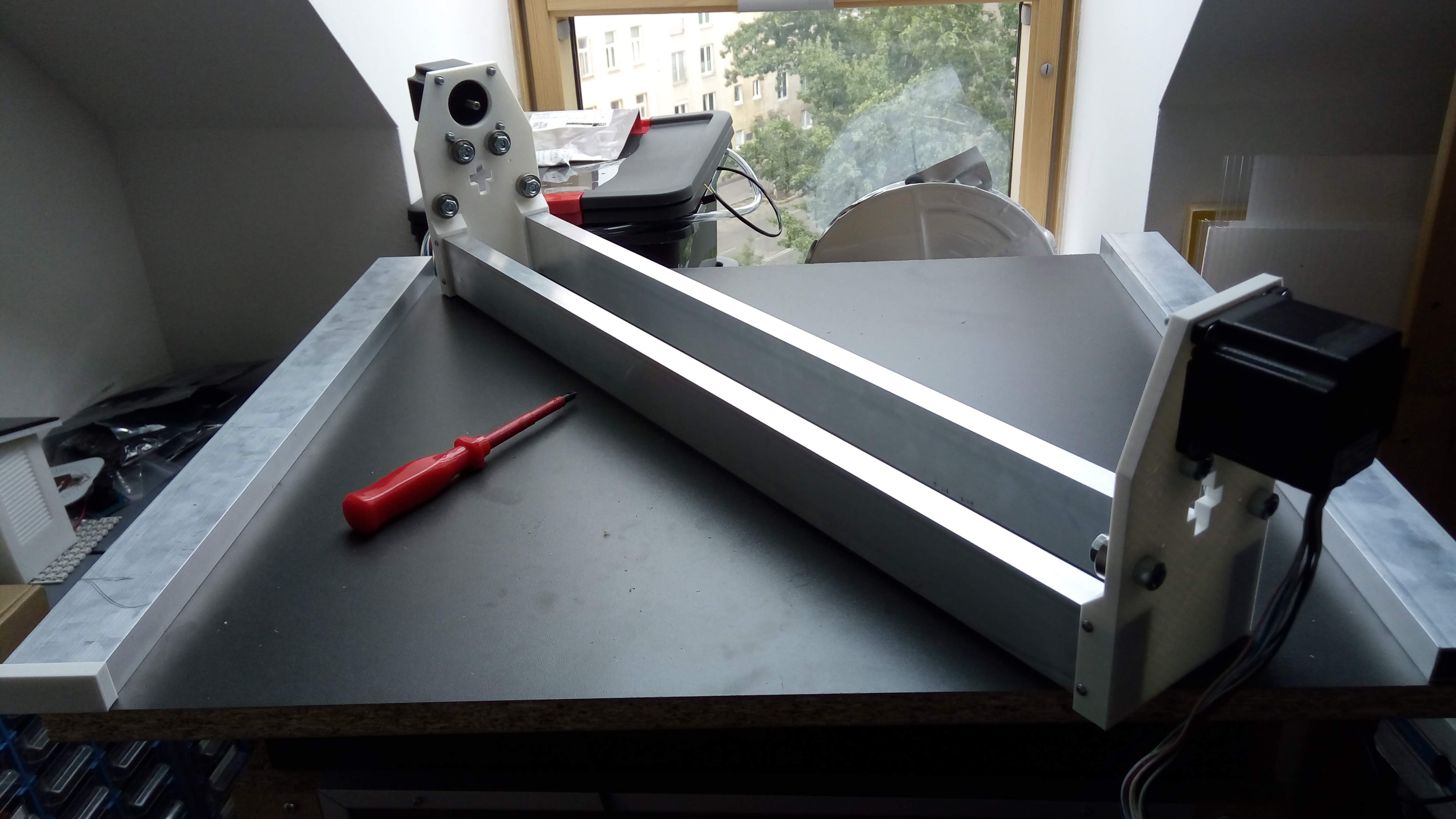
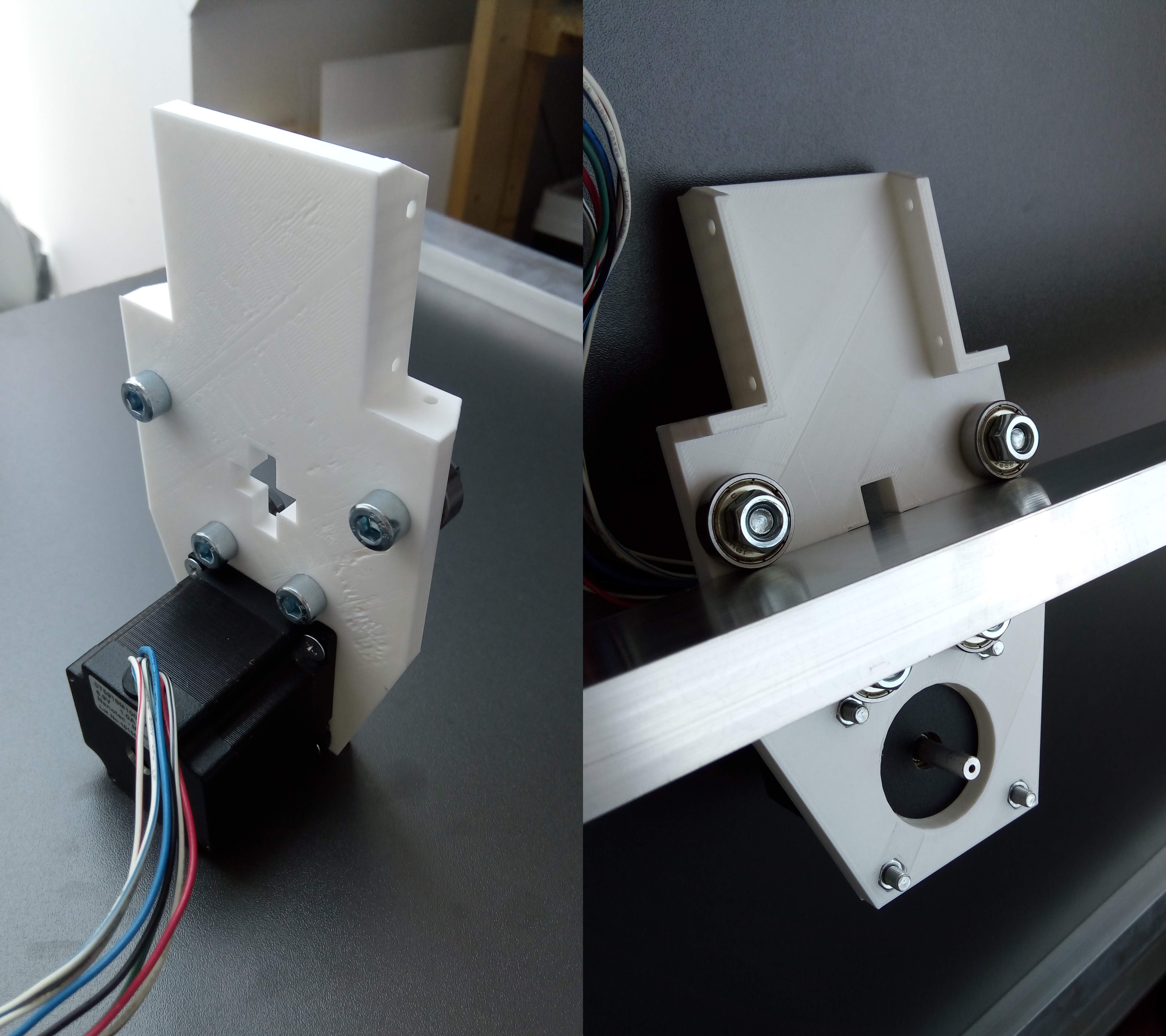
ChristophI'm trying to build a production-ready pick and place machine for prototyping and small production runs. The goal is to have the components loaded in the feeders all the time, so populating a new design is just a matter of sticking the boards in and uploading the pnp file. I normally try to use standard parts and to reuse most of the parts in my new board designs, so the number of different components should be manageable. The current plan includes space for 72 feeders (8mm, https://docs.mgrl.de/maschine:pickandplace:feeder:0816feeder), which should last me for a long time. If I ever need more space, I can move the side rails outward and make the machine up to 2m wide. It should also be possible to add a second gantry for twice the speed. The thing will be driven by NEMA23 stepper motors, which I have lying around. In the future, I might swap them out for brushless DC servo motors (https://odriverobotics.com/ seems promising).



 wschneider
wschneider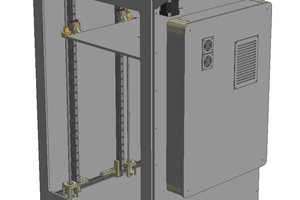
 Patrick
Patrick
 Ted
Ted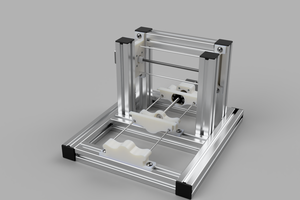
 Myles Eftos
Myles Eftos