 Myles Eftos
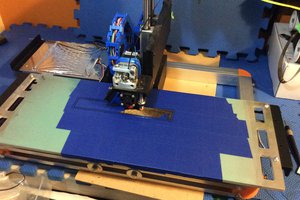
Myles EftosYou might remember the Makibox A6 - it was a sub-$400 3D printer that, like a lot of cheap printers at the time, was crowd-funded. It took forever to deliver, and there were a lot of problems with it.
Personally, I managed to print a single cube on my first print. On my second print something went wrong and I blew up the control board. I suspect because of the stalled extruder motor. The extruder needed replacing, as did one of the plastic lead screws (that was my fault - I over tightened it).
In the process of trying to get the parts replaced, the delivery got lost - they claimed it had been delivered, but I hadn't received yet. While trying to work this out, I had to quickly move interstate for work. To make matters worse, the company that made the Makibox disappeared around the same time, so I resolved myself to writing off the printer.
I decided to move to Melbourne permanently, so I flew back to Perth to collect my belongings - included what was left of the Makibox - and jammed it into my car for long drive over the Nullarbor.
And there is sat almost three years - dejected, in a cardboard box in my workshop.
On a recent trip back to Perth, my mother handed me a package which a person I worked with have given her. Apparently. it was delivered to the office years ago - so I had no idea what it was.
Low and behold, It was the replacement parts from my Makibox! Well, this was a sign. I put the parts next to the printer, as I wasn't sure what I was going to do with it. I had an M3D printer which was pretty terrible - maybe I could frankenstein the two designs and get one printer out of them?
Fast forward a couple of months - I come in to a bit of spare cash after selling off my time tracking application, and I decide to bite the bullet and buy a real 3D printer - a Lulzbot Mini. After setting it up and kicking out a number of awesome prints, I placed the M3D next to the Makibox. I now had a collection of old, cheap and not very good printers. I had to do something about that.
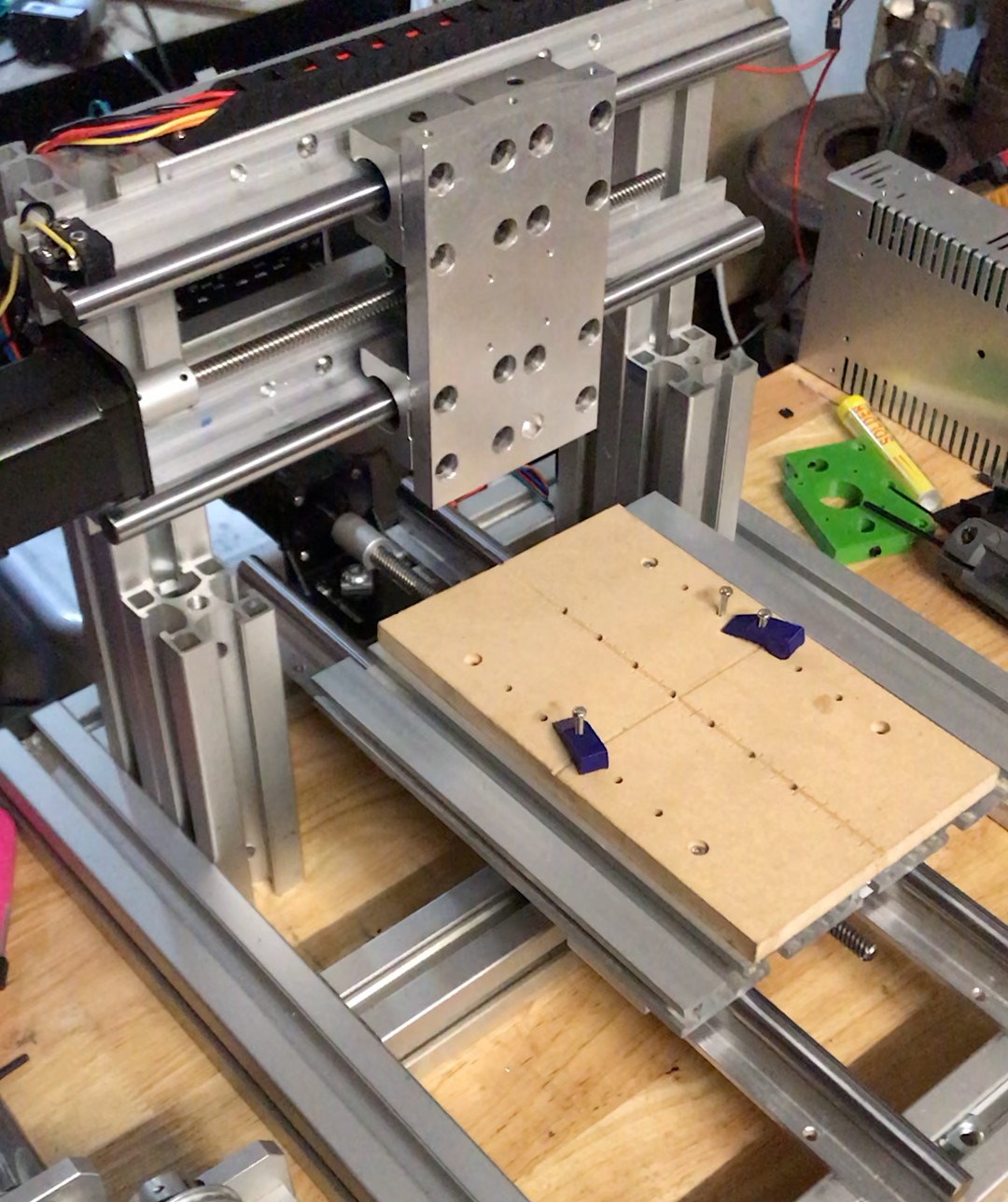
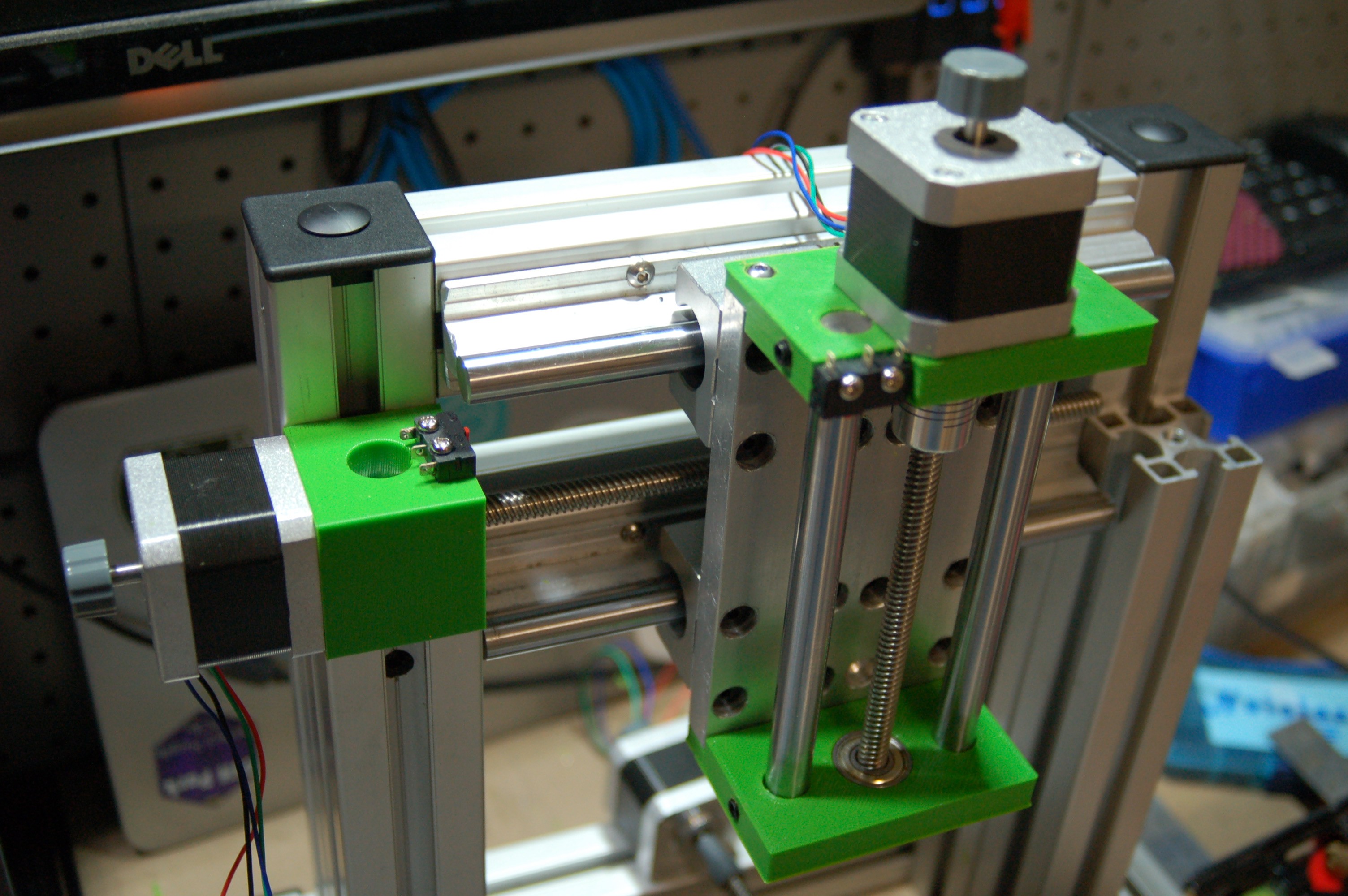
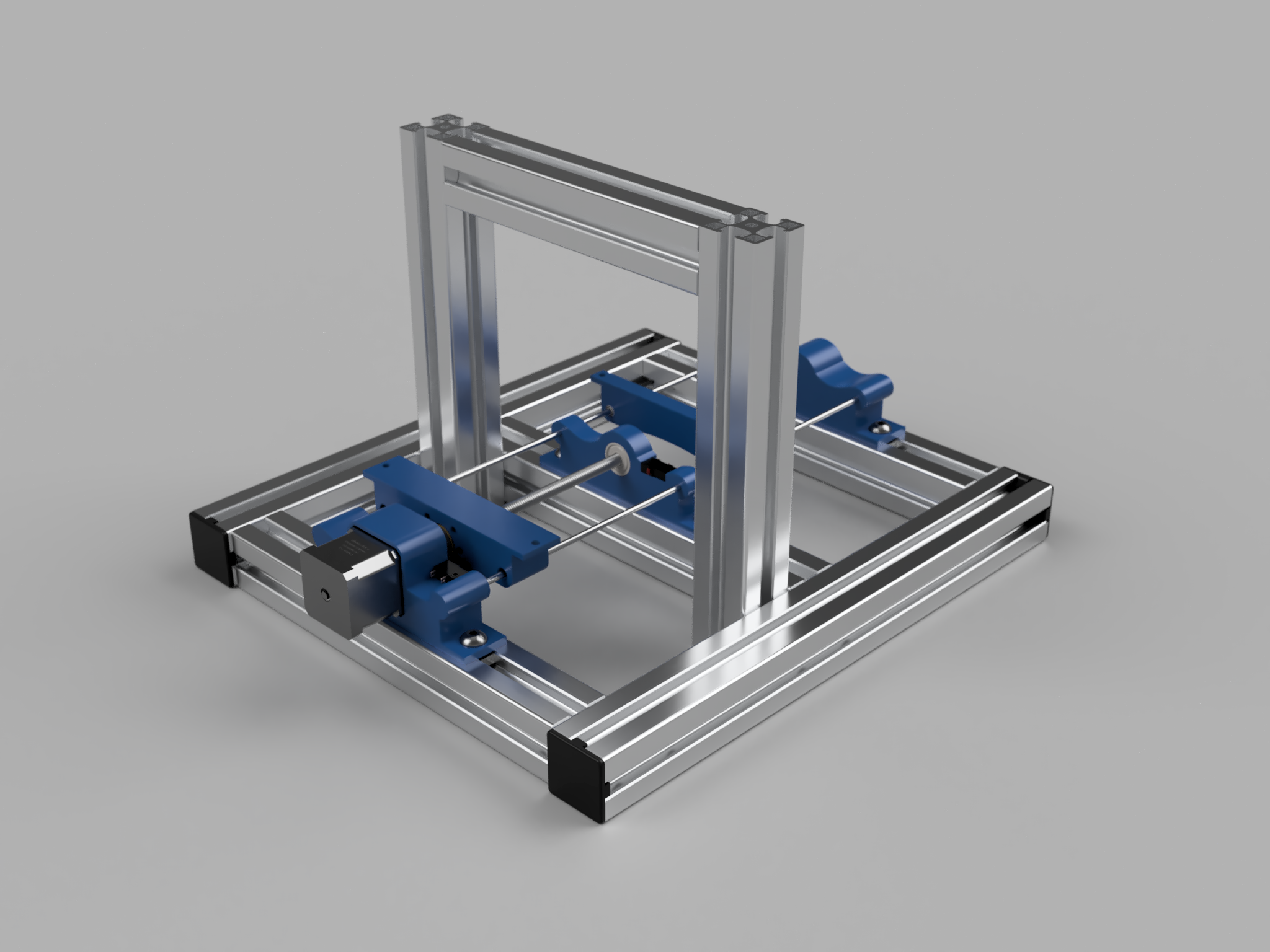
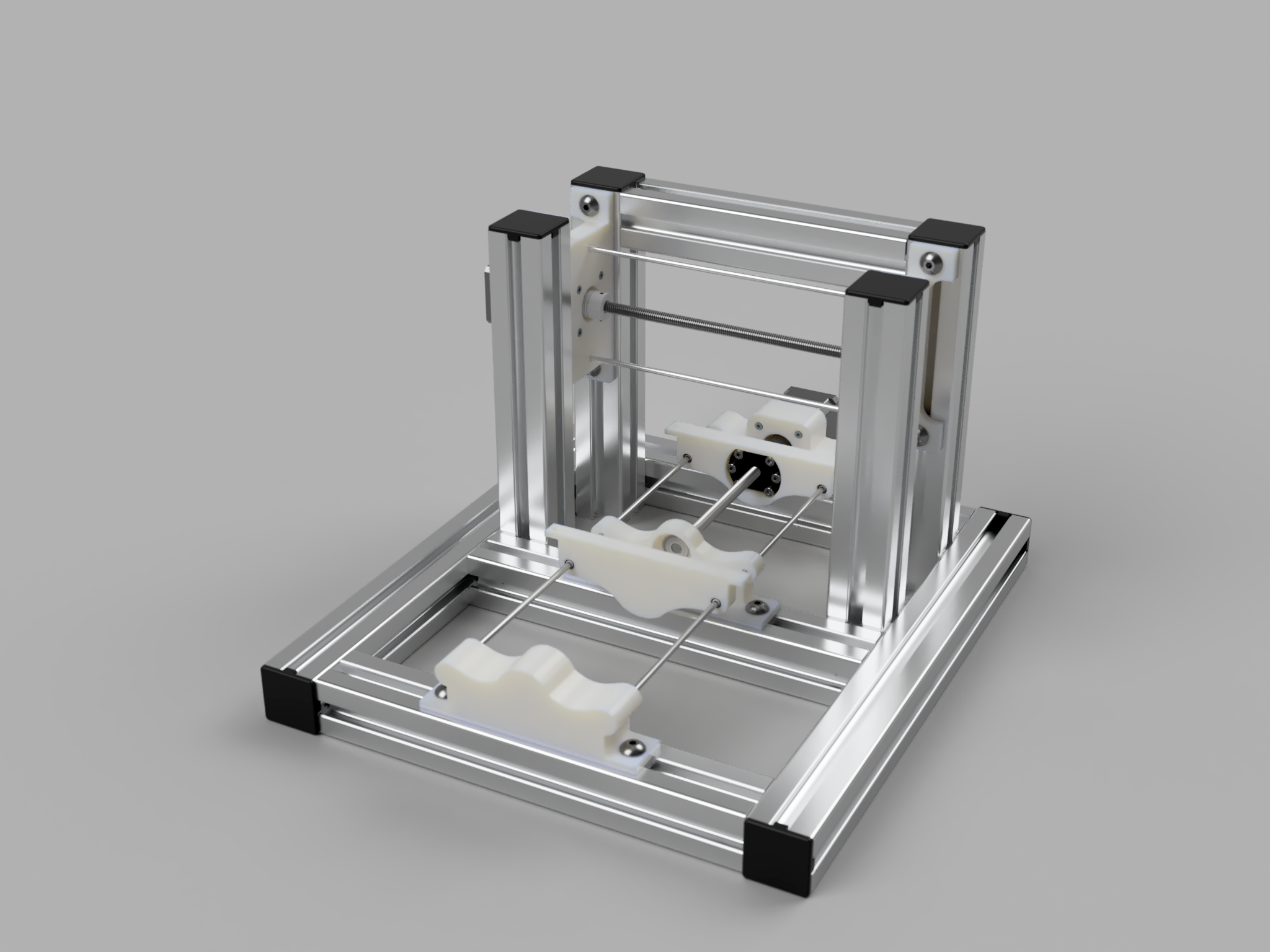
The Makibox has some decent steppers and screws in it (the M3D really doesn't - half the problem really) so I started looking at the parts and wondering if I could convert it to a PCB mill. Ideally I'll eventually want a proper mill that can do aluminium and stuff, but I reckon I can cobbled together something good enough to grind a few hundred micros of copper off some fibre glass. Bonus points if it'll drill through holes.
What's the worst that can happen? I have a broken Makibox?





 dekutree64
dekutree64
 ken.do
ken.do
 Christoph
Christoph
Thanks for the comments. This project is on hold at the moment, while I finish some other stuff.
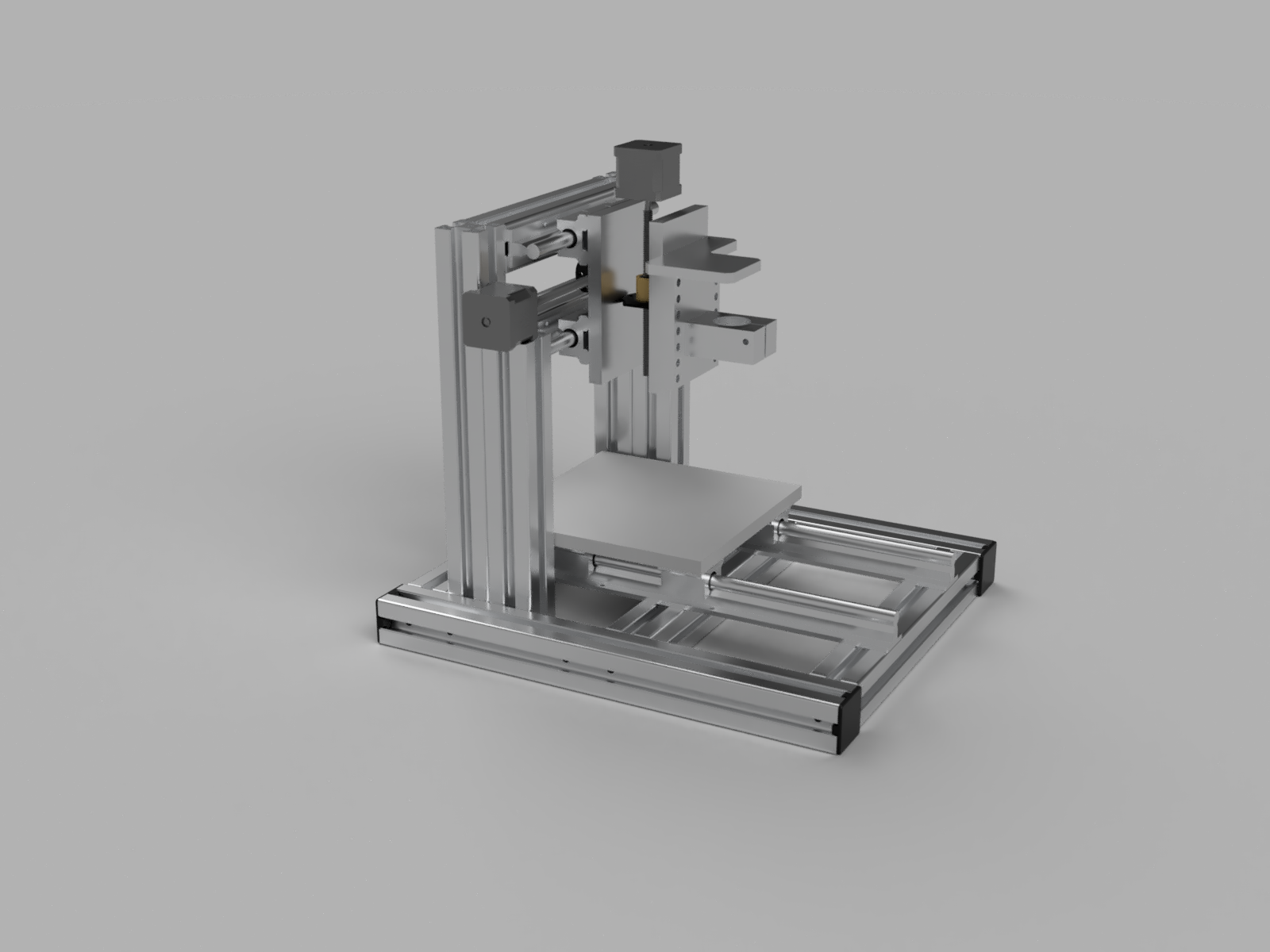
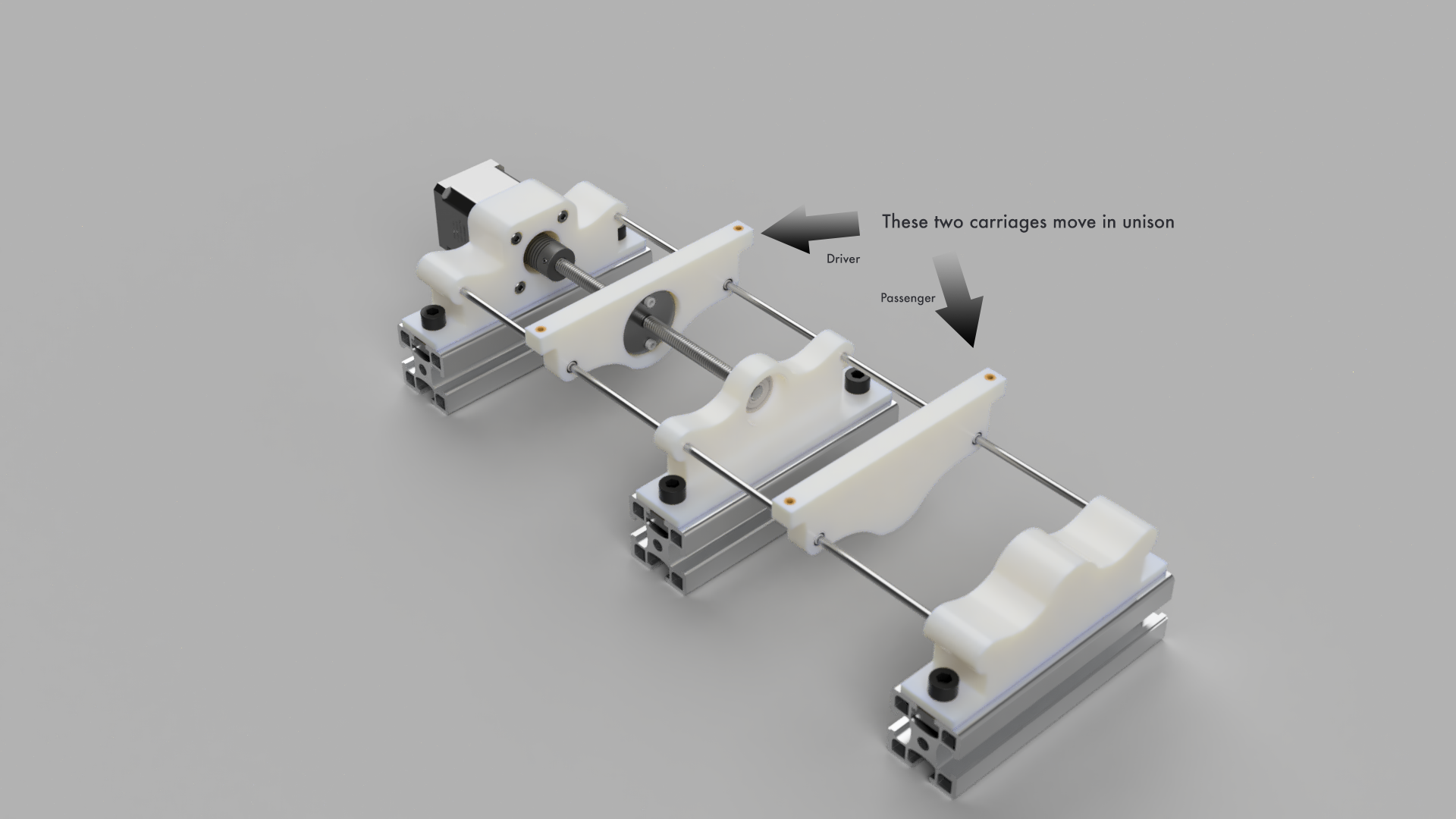
Power supply and controllers aren't show, but they are there :)
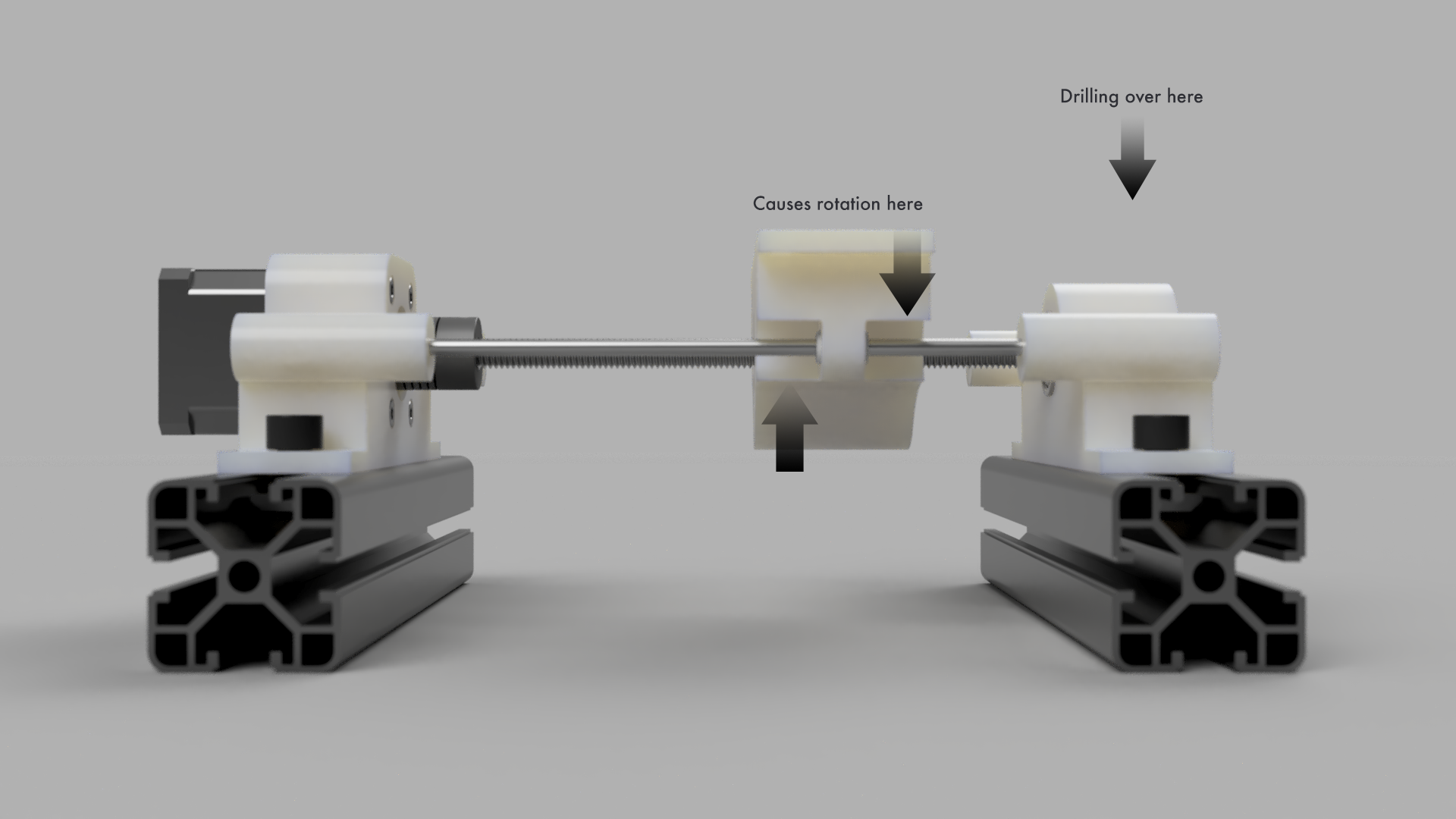
I have similar concerns around the plastic - it might just end up being a pen plotter. We'll have to see!