 Giovanni Leal
Giovanni LealWe used to work with the myoWare sensor(https://www.adafruit.com/product/2699) and dont get us wrong, it works great and much better that our implementation in many ways.
But the main goal now it's ease of use, including the setup process. That in the myoWare involves sticking 3 electrodes.
So the video will give you a better idea :
We will introduce Andres fomrally in due time but the reason for grabbing a pulse sensor(https://www.adafruit.com/product/1093) and making it a muscle contraction detector its that it is really easy to put on and down.





 We hope you can make a great hand!
We hope you can make a great hand!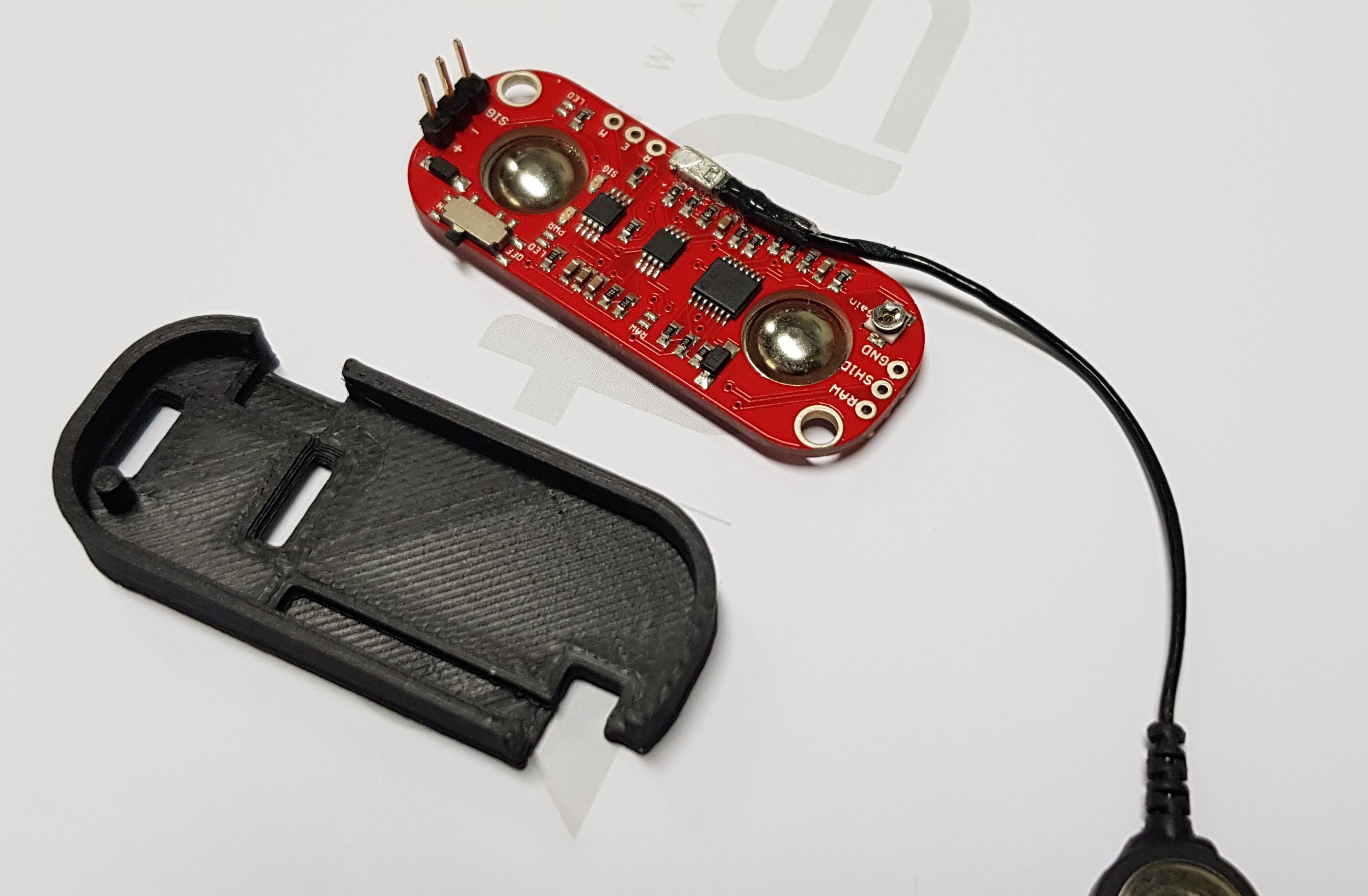
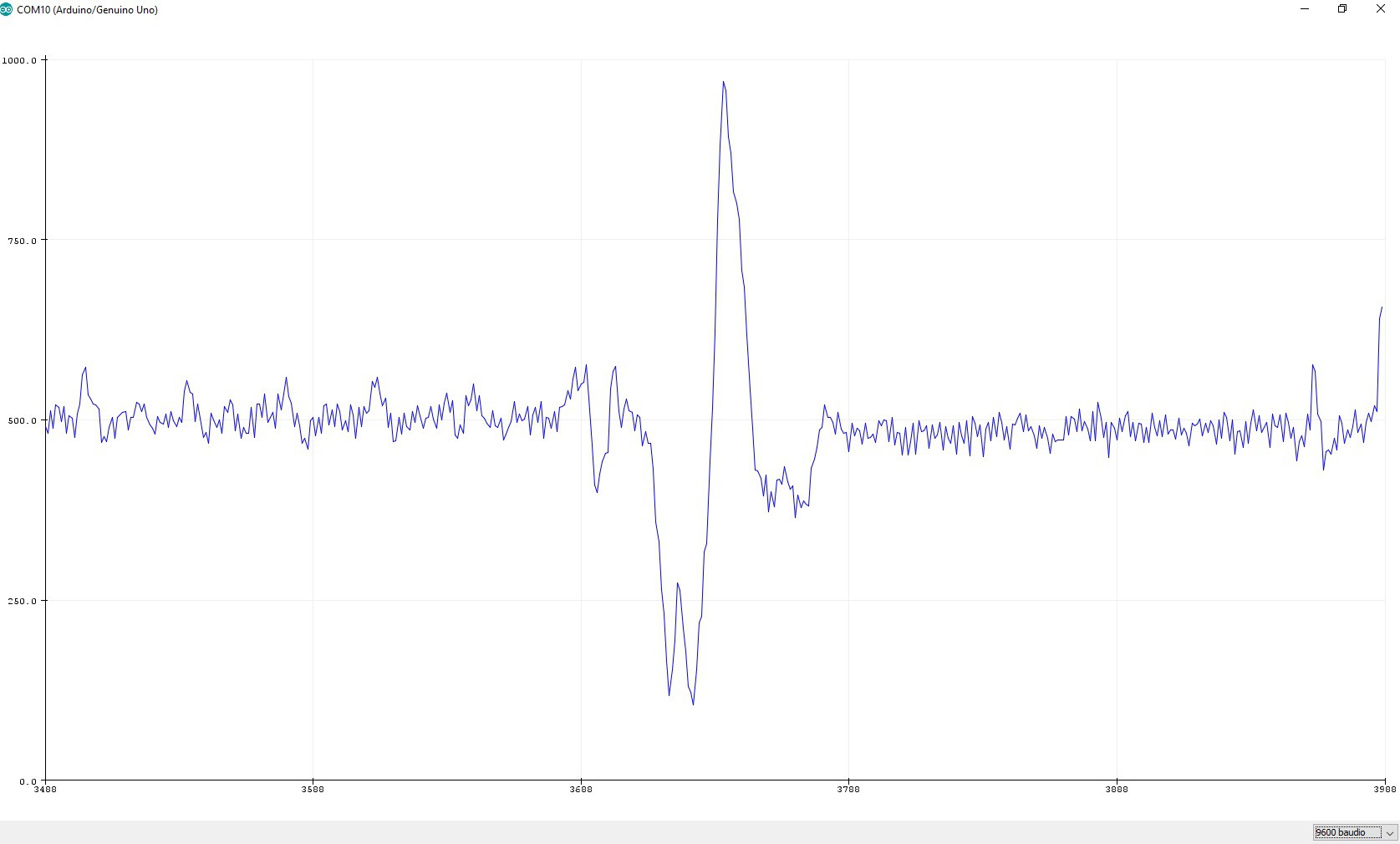
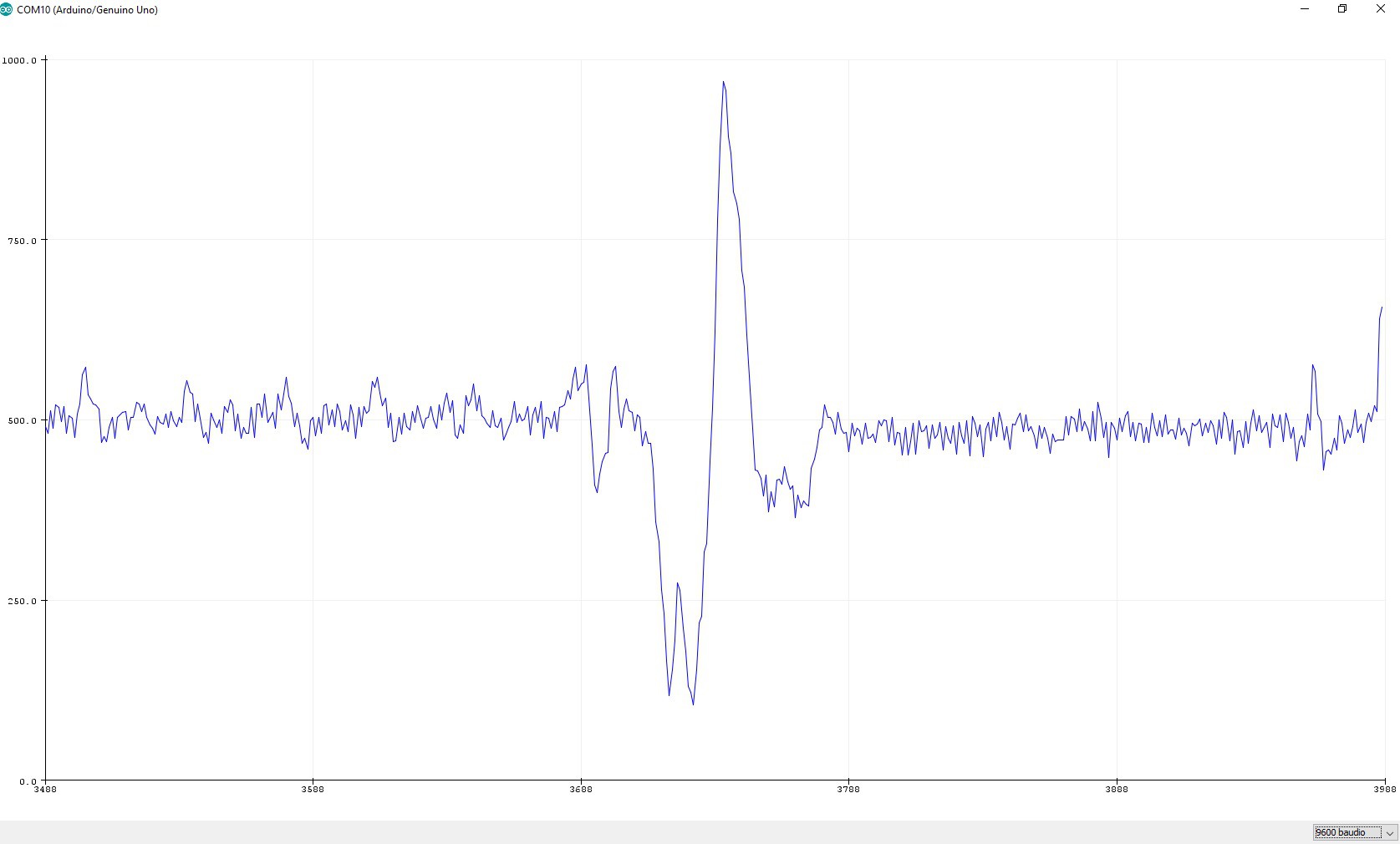 Clearly this one has a lot of noise but that's the subject for another post. So as always feel free to ask us anything, it would be great on the comments not private.
Clearly this one has a lot of noise but that's the subject for another post. So as always feel free to ask us anything, it would be great on the comments not private.






 shlonkin
shlonkin
 Laio Athos Nevar Fonseca
Laio Athos Nevar Fonseca
 CriptasticHacker
CriptasticHacker