 Yannis
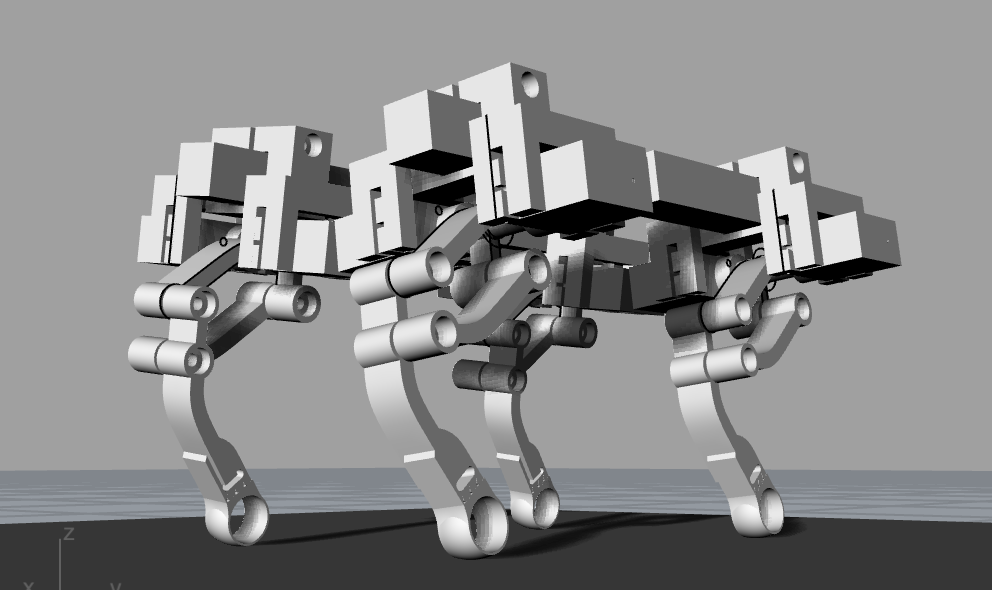
YannisI just finished modeling an alternative leg design with motors mounted at root. This should allow for faster leg response, although the overall width of the design increases due to the placement of the servos. Will print and test tomorrow.
A project log for Quadruped Robot
A quadruped robot using cheap servos closed-loop control and force-sensing resistors for ground force feedback. Uses Teensy and PCT.
I just finished modeling an alternative leg design with motors mounted at root. This should allow for faster leg response, although the overall width of the design increases due to the placement of the servos. Will print and test tomorrow.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thanks for the comments! I'm currently printing the parts to have this tested. @davedarko do you have your design public somewhere? I'd love to take a look. Also looking forward to seeing your idea. Will post back on this one.
Are you sure? yes | no
seems I was a bit sloppy with the documentation and all... here's the project: https://hackaday.io/project/29187-4-legged-robot
and here's the latest version, "only" have it on video https://youtu.be/_zLsArh_GZ0?t=7m57s
Are you sure? yes | no
Great thanks for the links! I've posted a new project log with the printed design. It's like a scissor mechanism. Seems to be woriking well so far, we'll see.
Are you sure? yes | no
I think @davedarko tried something similar recently, and the problem is that very small differences in the movements of servos translate to large movement of the legs, which means that you lose precision and strength. I think in his case there was one position where the play in the servo gears was enough to move the legs freely a couple of centimeters.
Are you sure? yes | no
yep! this exactly. hope you're having more luck with this though! I have another idea on how to use servos a bit more efficiently as well.
Are you sure? yes | no