0%
0%
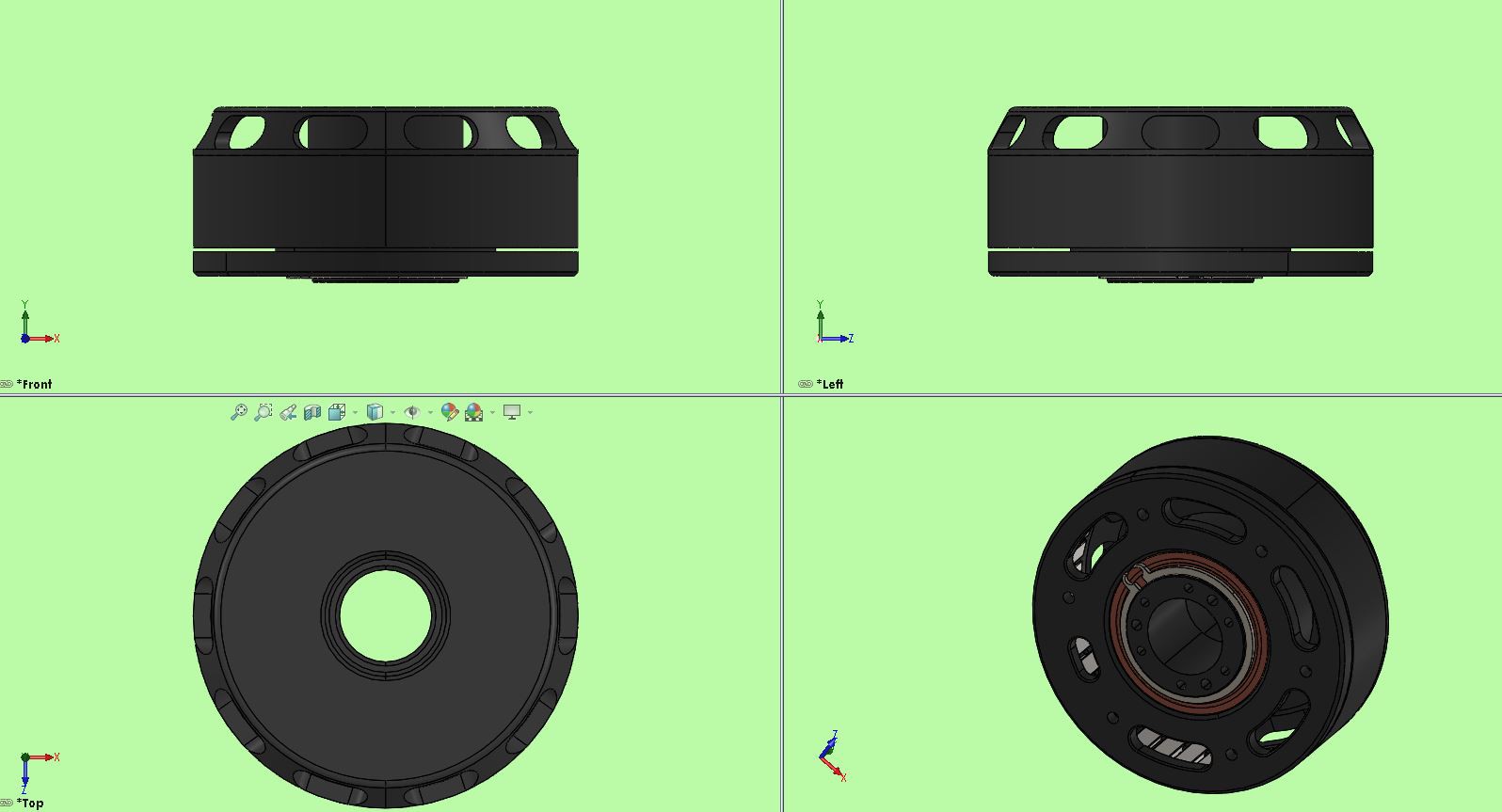
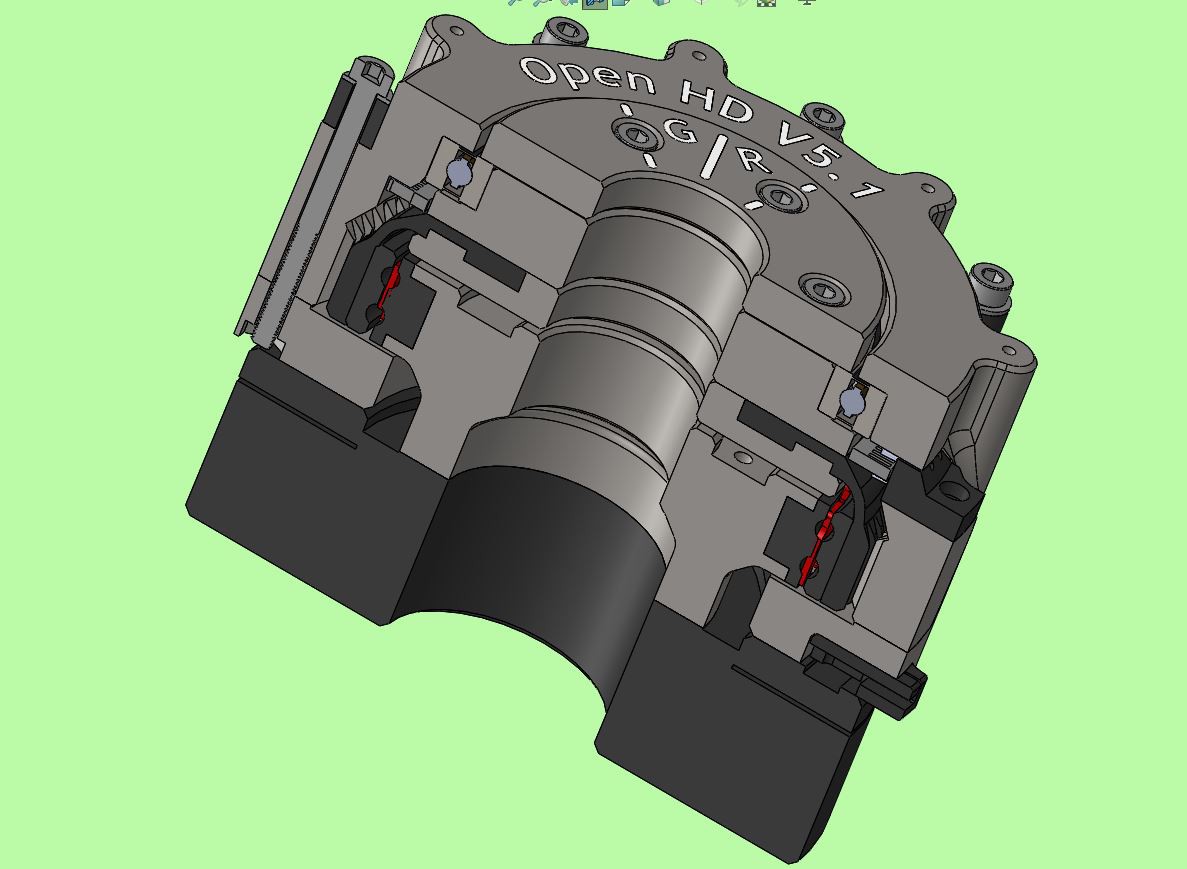
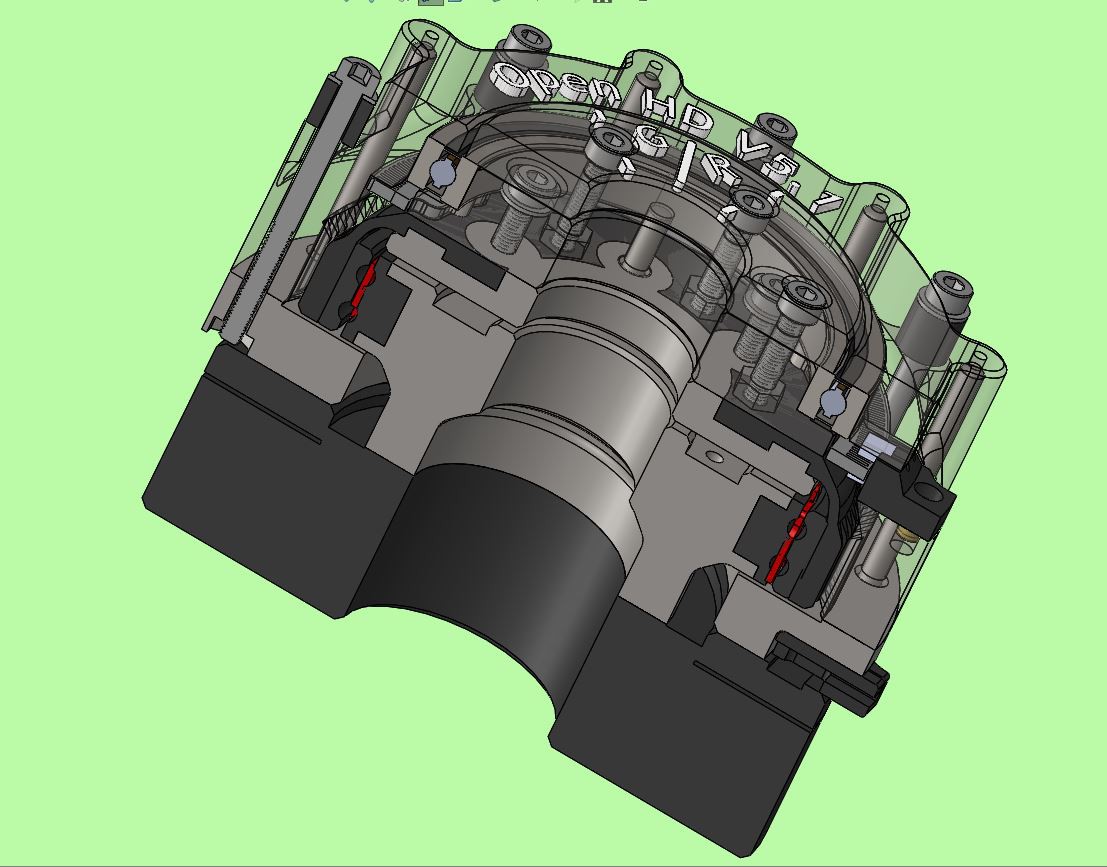
Open HD
A high torque, high precision, Strain Wave Gear (harmonic drive) based 3D printable closed loop servo actuator for use in robotic arms
 Sam Armstrong
Sam ArmstrongBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


















 Peter Sinclair
Peter Sinclair
 Simon Merrett
Simon Merrett
 Damian Lickindorf
Damian Lickindorf
 Tim Wilkinson
Tim Wilkinson
HI please provide files for the amazing project