 Dinithi Silva
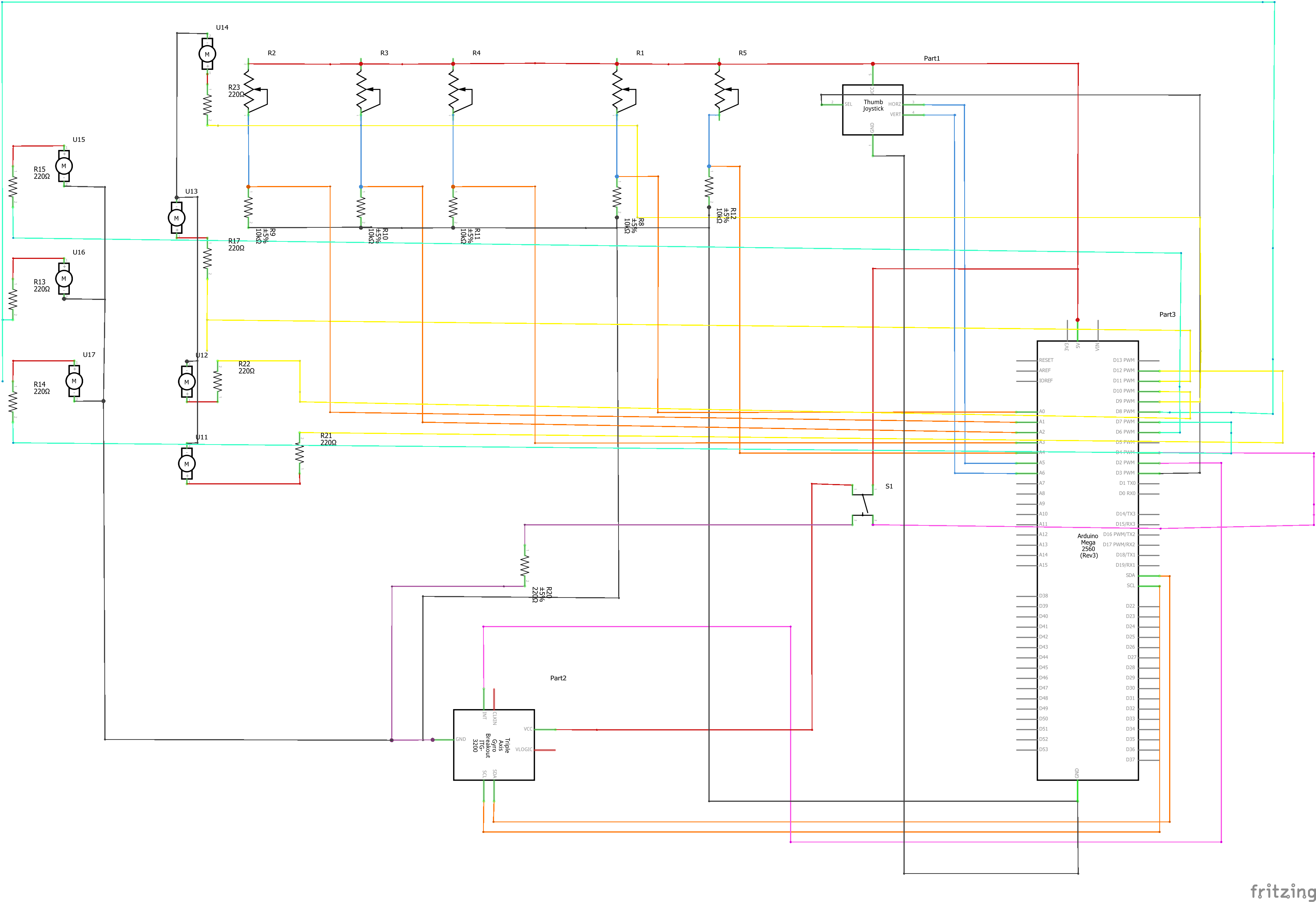
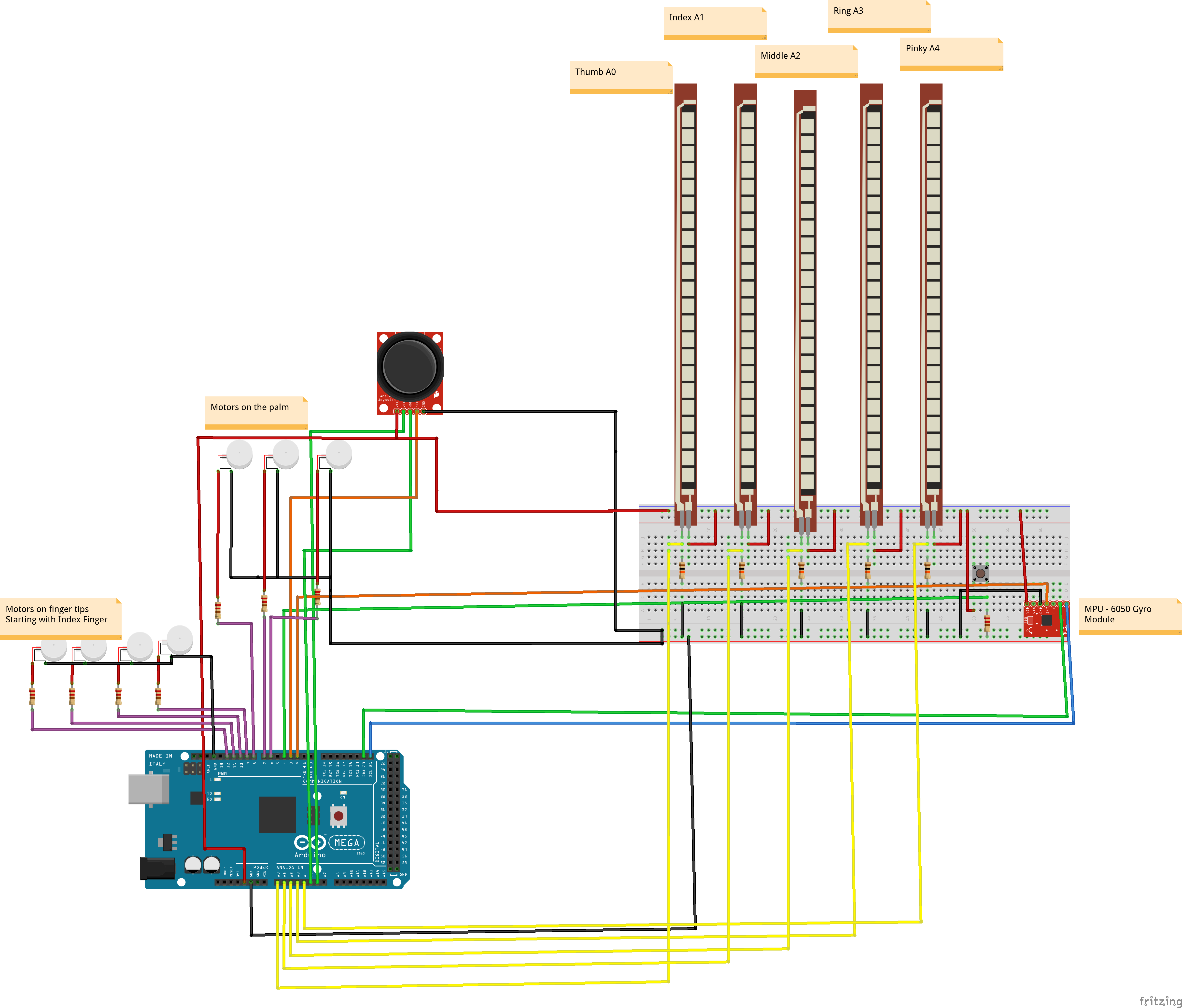
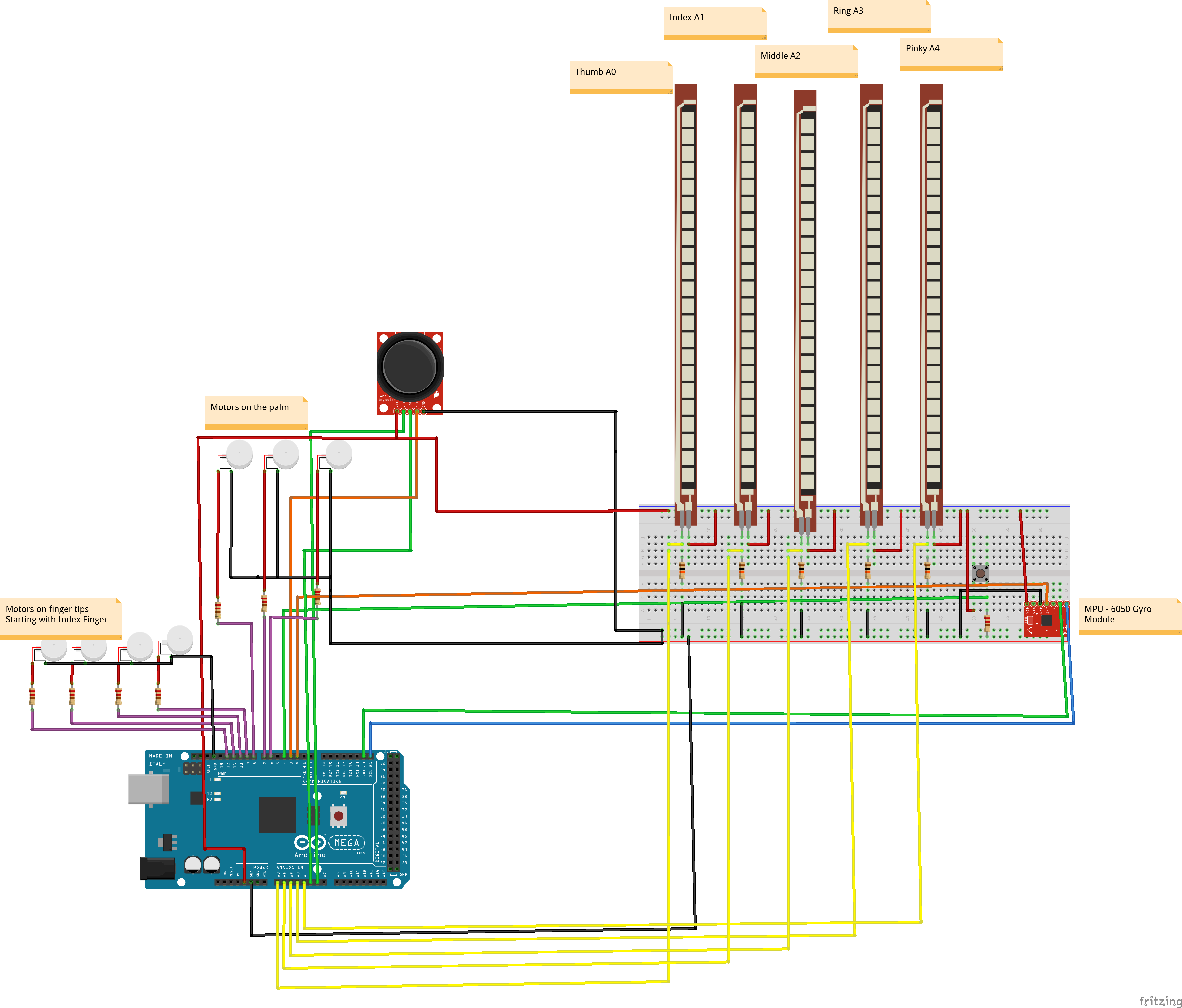
Dinithi Silva- Flex sensors for five fingers to understand the finger bend capacity
- Joystick and buttons to move the virtual hand
- Gyroscope to rotate the virtual hand
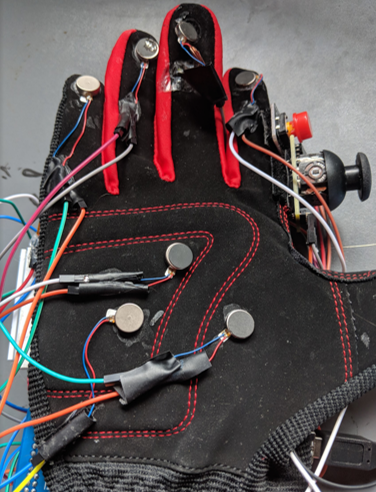
- Four vibration motors on finger tips and three vibration motors on the palm to feel when you touch virtual objects
- Multiple vibration patterns to understand the type of object being touched – a solid object like a rock vs putting your hand under a roaring waterfall
0%
0%
DIY Haptic Glove for VR
A haptic glove that vibrates when its touches a virtual object. It also tracks physical finger positions and hand orientation.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Chris B
Chris B
 finallyfunctional
finallyfunctional
 vladimir.hermand
vladimir.hermand
 OpenBionics
OpenBionics
Hi, i did as you instructed, mine is unity 4, when i opened the project, it automatically adjusted to unity 4.
when i run the program, the hand just started moving around the environment itself, i moved the mpu6050, and also joystick, but no use, the hand, with the purple ball rounds the environment. any idea what did i do wrong.