0%
0%
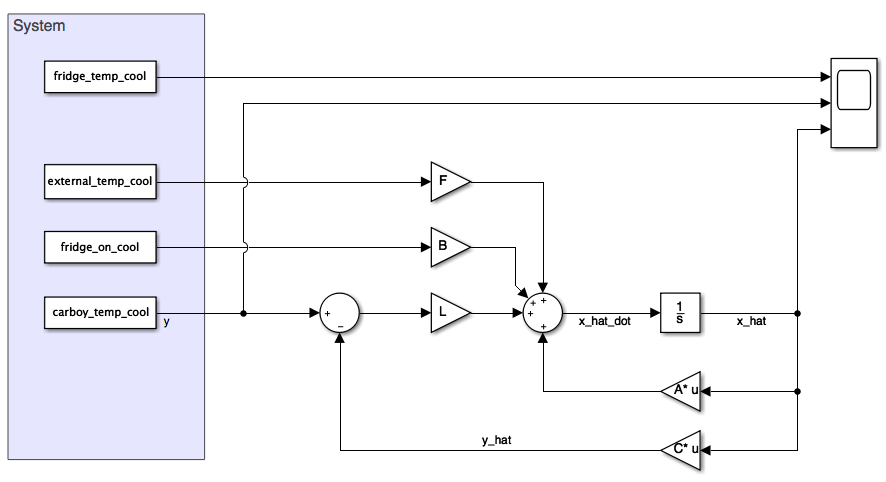
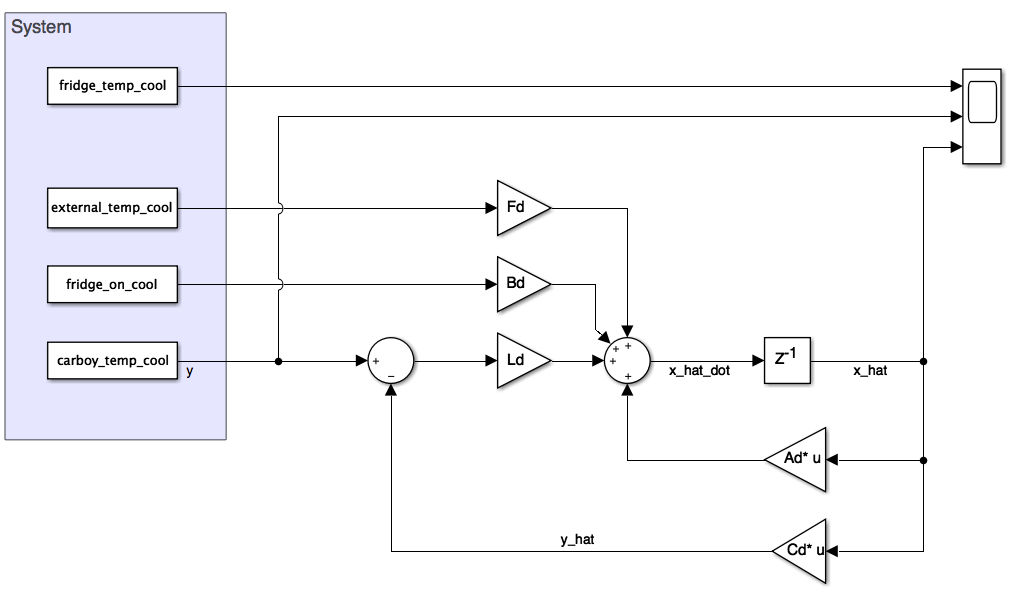
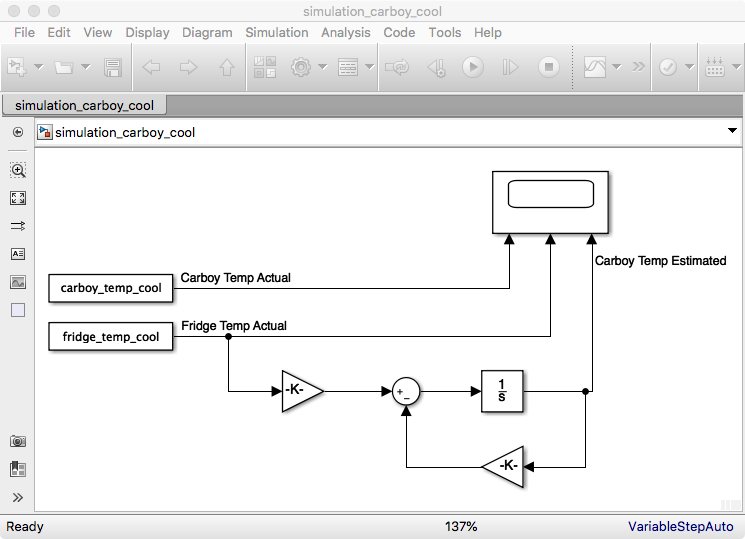
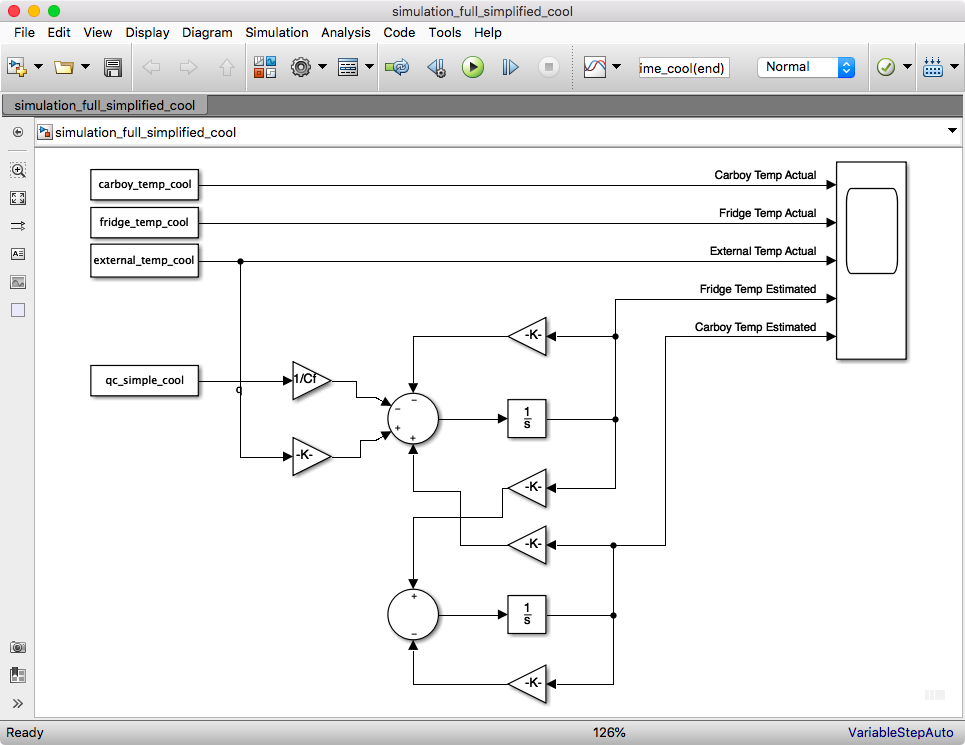
MIMO kegerator
A "kegerator" that can keep my beer cold and allow me to ferment my beer at precise temperatures using a MIMO (state space) control design.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 justin.richards
justin.richards
 2077762b
2077762b
 Krockwell
Krockwell