 Joshua Broekhuijsen
Joshua BroekhuijsenI was inspired by a similar project called "Mitosis," but opted to try to shove an optical sensor into my split keyboard - which has turned out quite well, all things considered!
I originally did a write-up on Imgur, but decided to move stuff over to here to enter the Human Interface challenge! If you want to read the original write-up on Imgur, see here:
Here's the low-down, and I'll get into more details as I have time:
Dichotomy is based around the nrf51822 Nordic Wireless Transceiver chip (bluetooth-capable, but I'm not using it). It has 24 mechanical switches, 1 optical encoder, and a switched rotary encoder on each keyboard half. These are all wired directly, since the uC had enough pins. The firmware mostly waits for a hardware interrupt from one of the switches, does some debouncing, then sends the keystates (on or off) in a compact, 3-byte blob (plus 4 more bytes for optical encoder status, rotary encoder status, and the switch on the rotary encoder) to a receiver module.
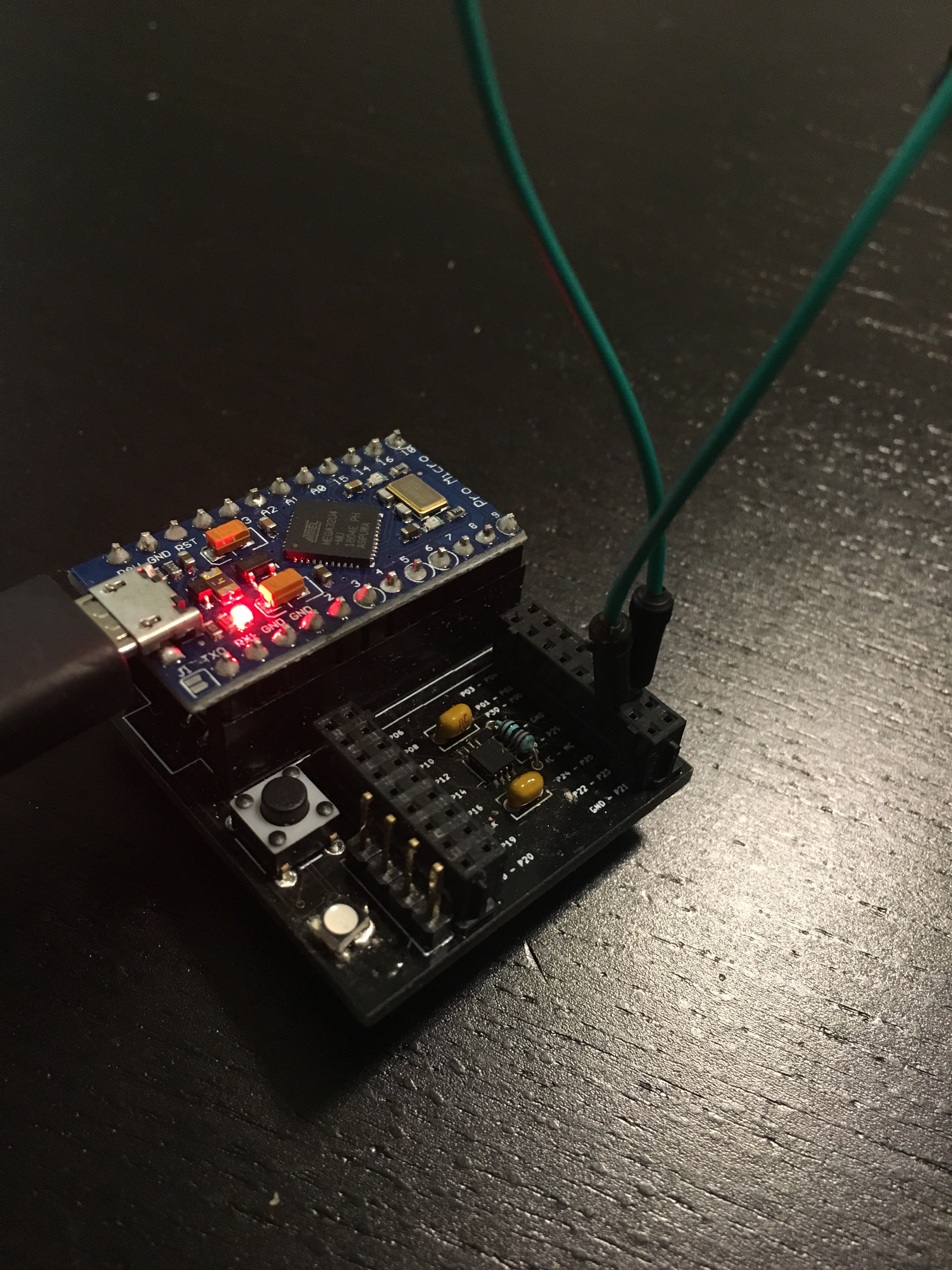
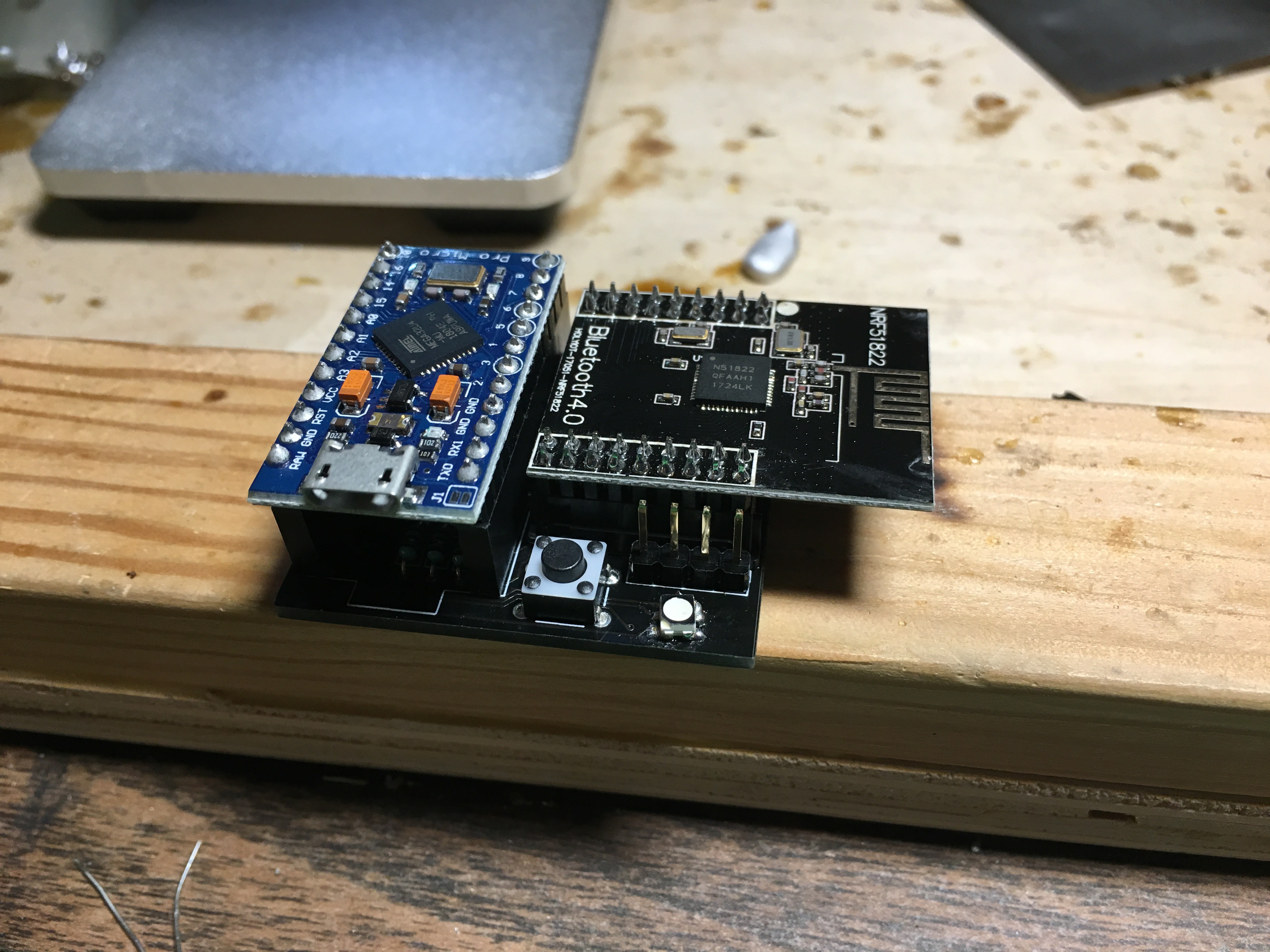
The receiver consists of an arduino pro micro with an NRF hat. The arduino runs QMK, a (fantastic, open-source) keyboard firmware derivative of TMK. The NRF receives the signals, concatenates them, and sends them via UART to the arduino, where QMK picks up the rest.
The circuit boards are many-function: first, you can break off the part to which the switch actually solders, and use it as a "plate" to hold all the switches mechanically. Second, it's mirrorable - so it's used for the left and the right halves. Finally, it contains a break-away receiver PCB underneath the battery holder: so it's all combined into a single PCB order.
The batteries should (haven't actually got there yet with active use) last 6+ months, so we'll see how that goes. The whole assembly is hot glued to a laser-cut acrylic base that slides pretty well on a standard neoprene deskmat (or just a desk). The base also holds a silicone wrist-rest to get a little bit of tactility when moving Dichotomy around.
Version 2 is currently in the works with some minor PCB updates and some software clean-up.
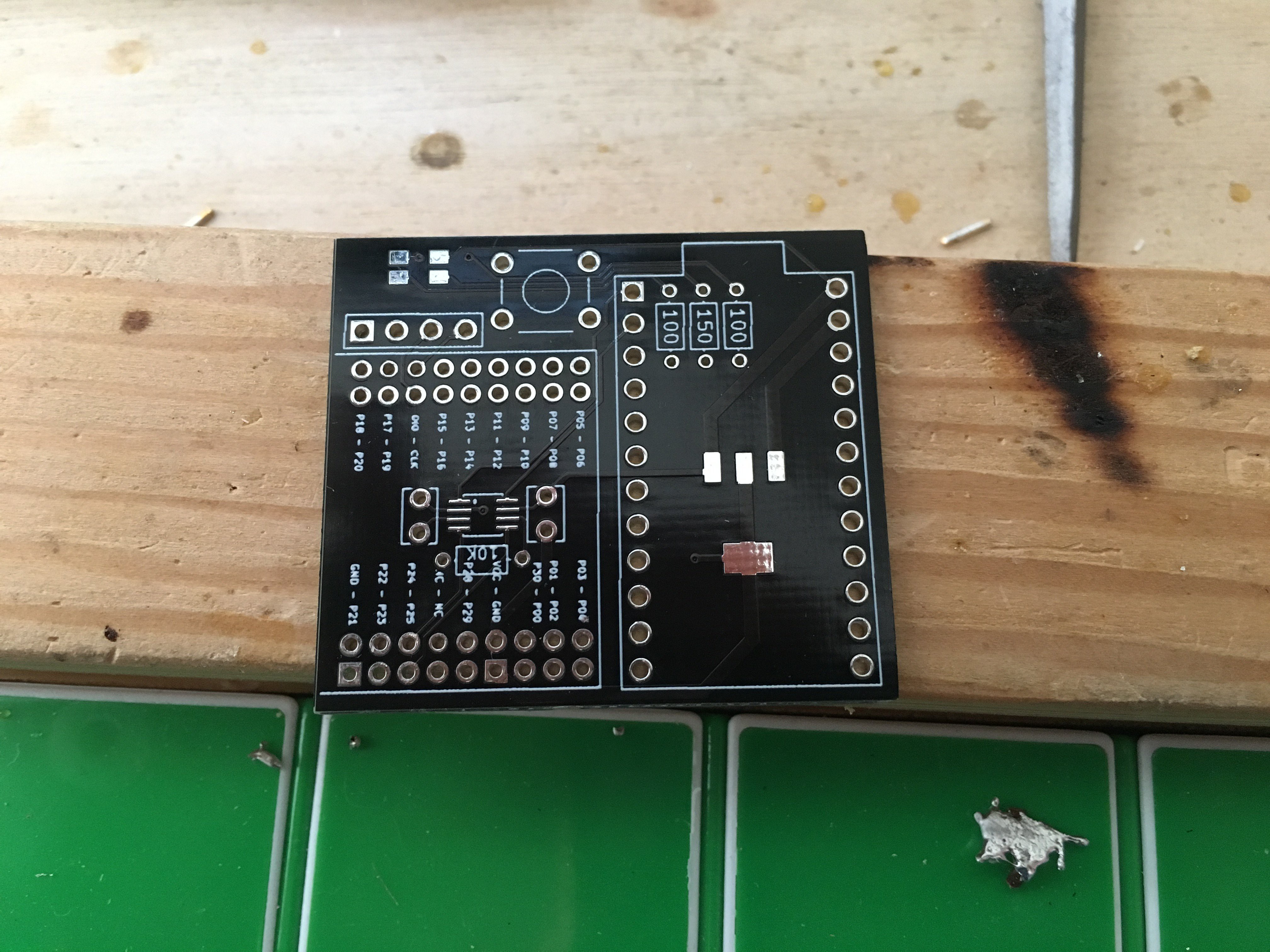
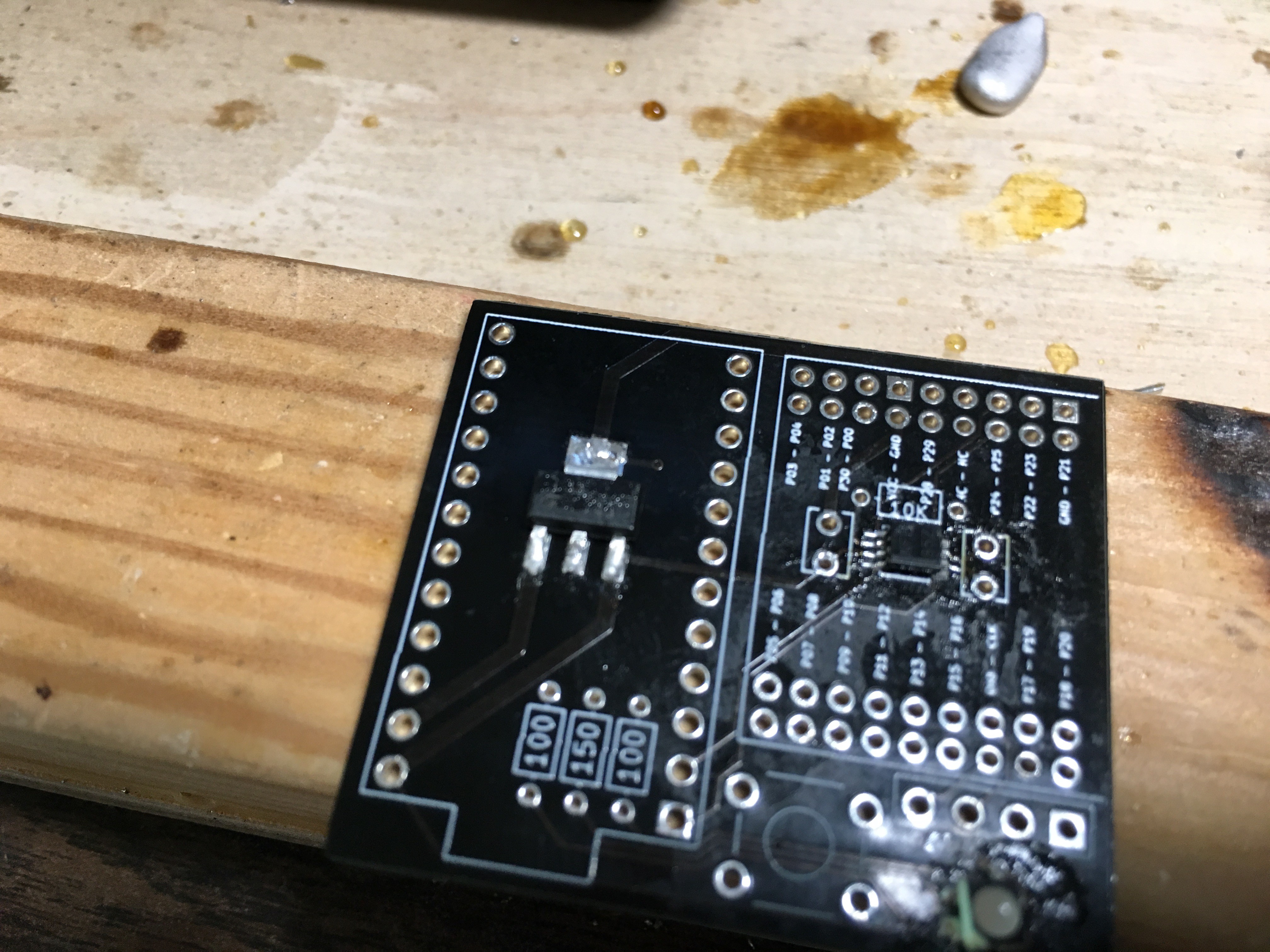
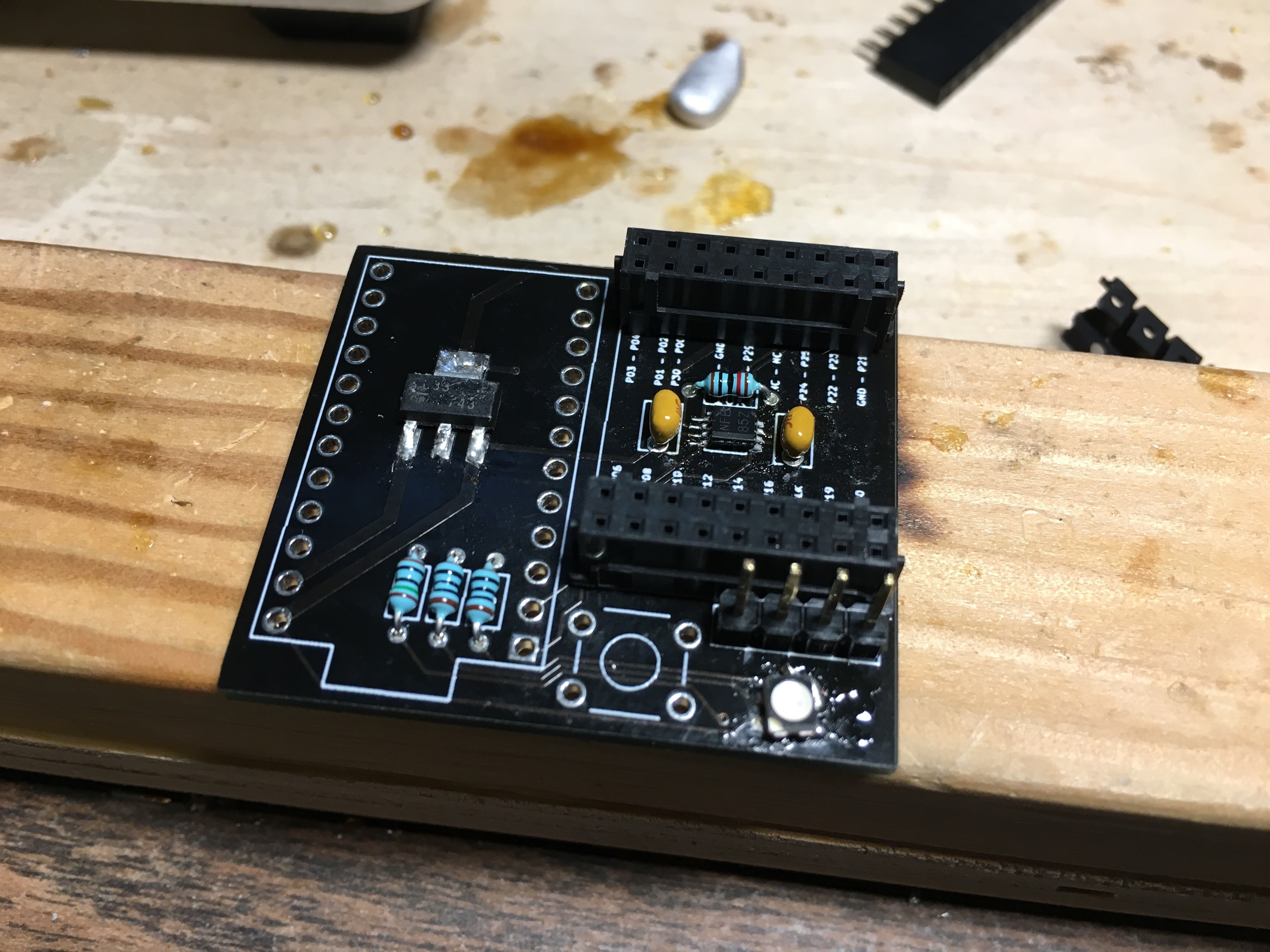
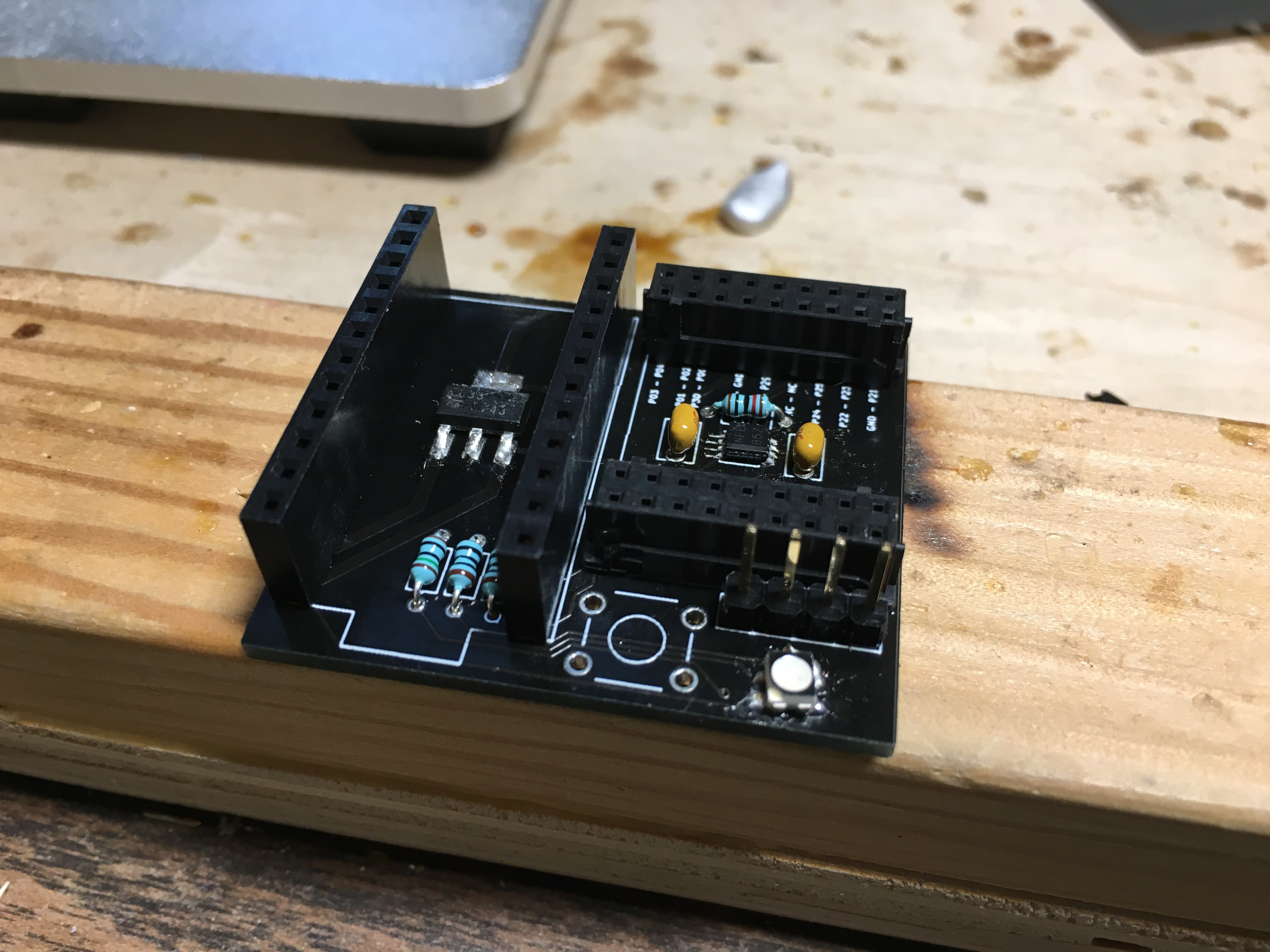
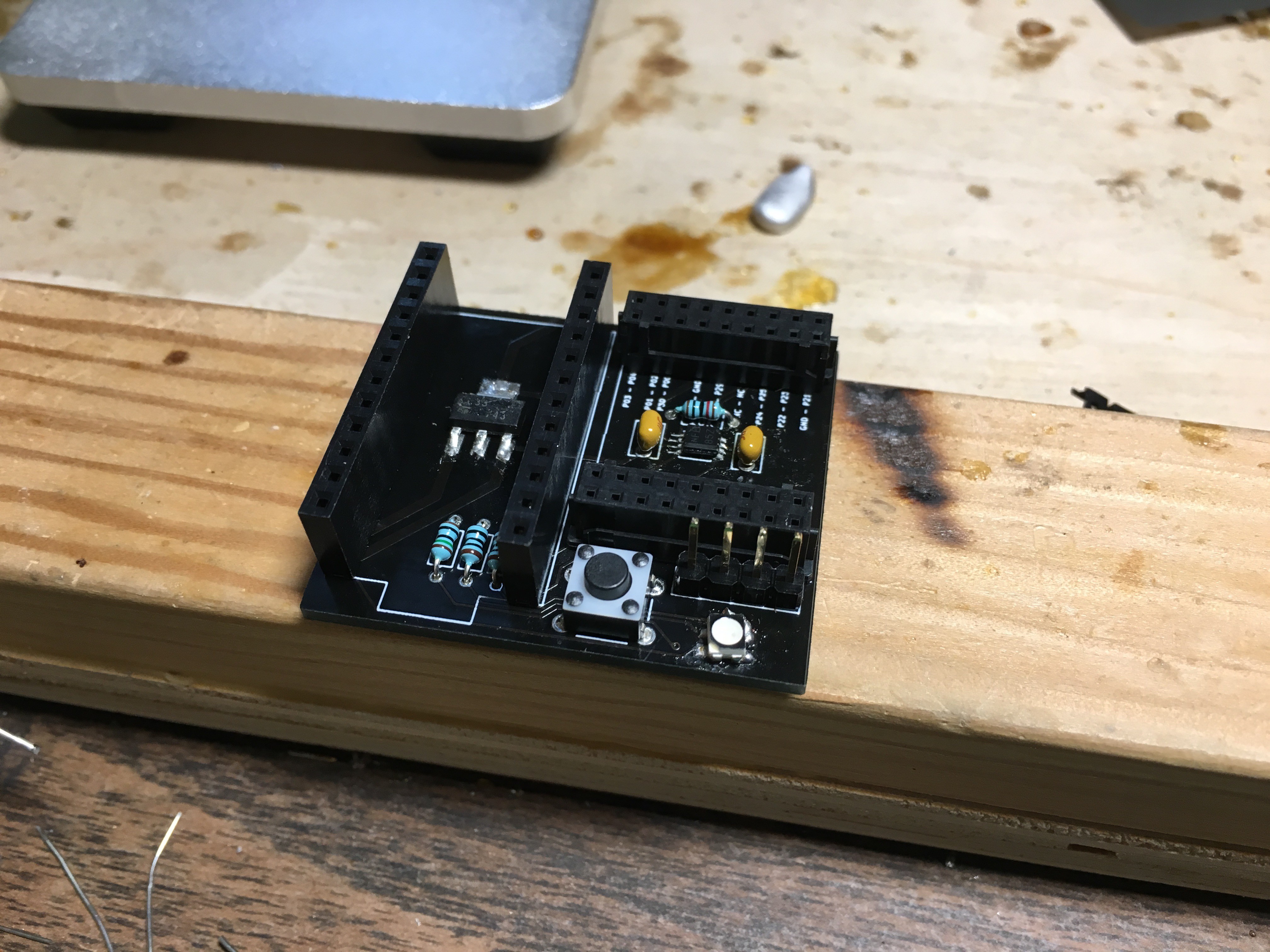
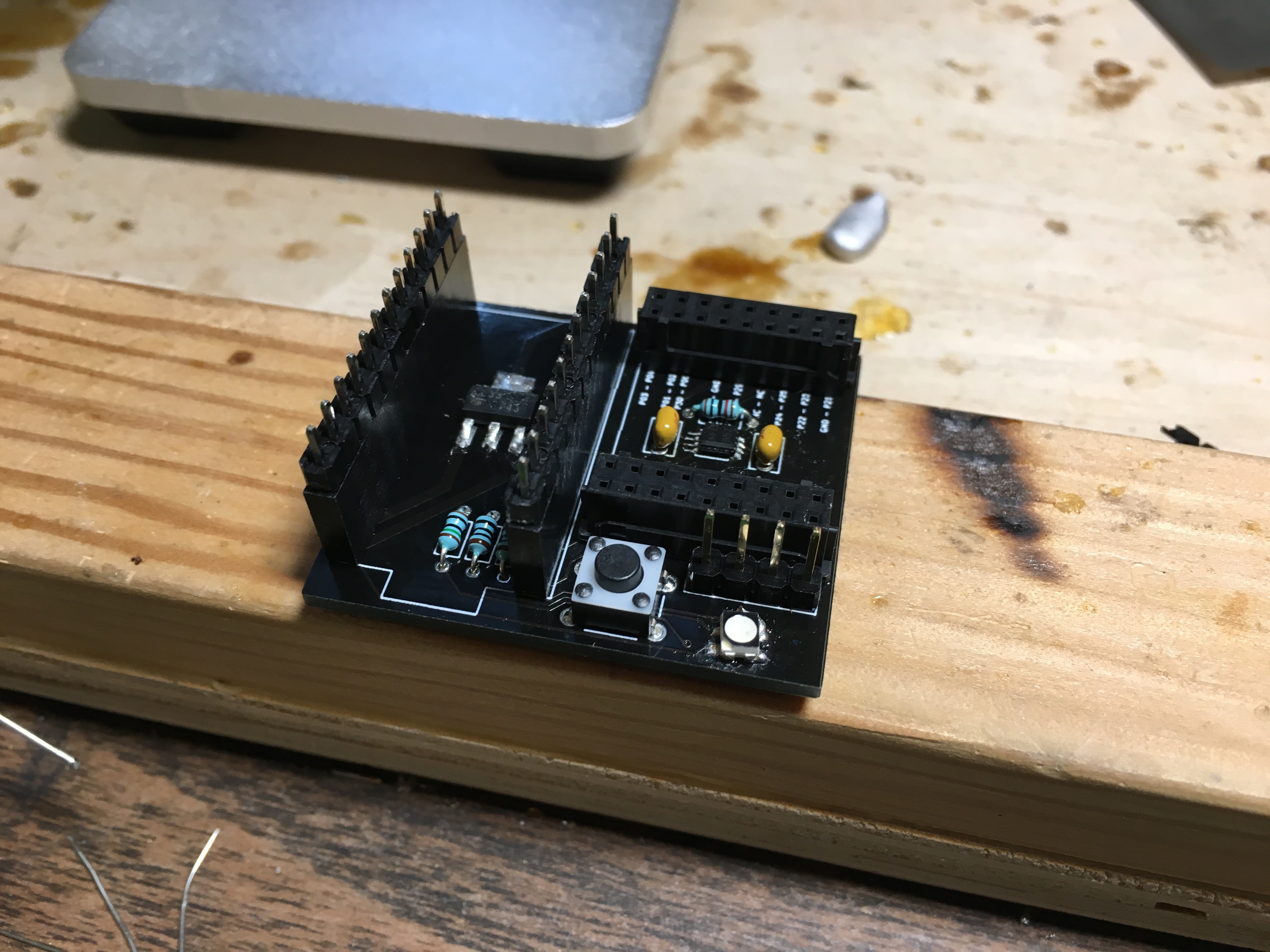
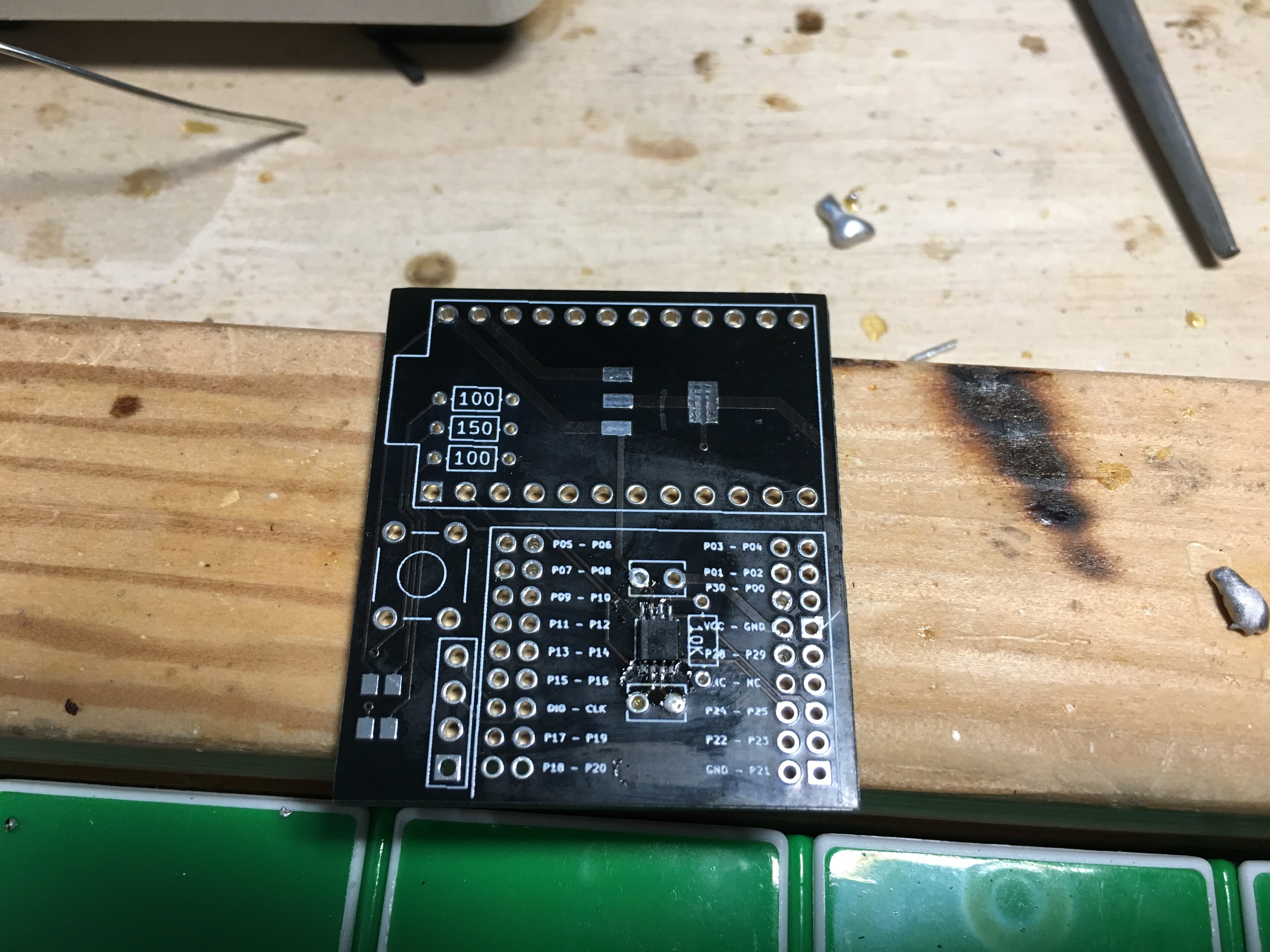 There we go, all soldered. Try not to clog the capacitor holes (you can see I ignore my own advice if you look at the hole to the bottom-right of the IC we just soldered). Next, we'll be soldering on the LED. Again, my board (the one in the picture) and the boards I shipped have slight differences. The board YOU have should have a small triangle in one corner of the LED footprint. Align the triangle on your LED with the triangle on the board. Don't do what I did.
There we go, all soldered. Try not to clog the capacitor holes (you can see I ignore my own advice if you look at the hole to the bottom-right of the IC we just soldered). Next, we'll be soldering on the LED. Again, my board (the one in the picture) and the boards I shipped have slight differences. The board YOU have should have a small triangle in one corner of the LED footprint. Align the triangle on your LED with the triangle on the board. Don't do what I did.
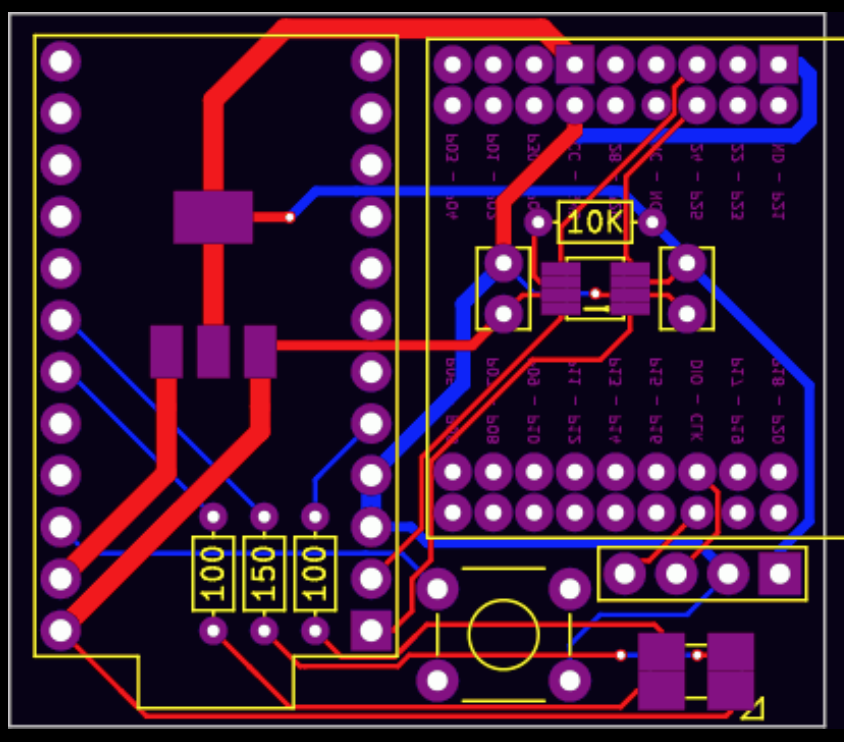
 Now we'll get on the resistors and capacitors. Another deviation (WHY AM I EVEN POSTING THESE INSTRUCTIONS?) from the picture to your board: I put my resistors (the three that are right next to each other) in the "wrong" places. The brown-green-black-black should go in the MIDDLE of the three, and should be flanked by brown-black-black-blacks. The brown-black-black-red is the 10k, and should go by the 8-pin IC we soldered earlier. Neither the resistors nor the capacitors are directional, so you can flip them around however you want.
Now we'll get on the resistors and capacitors. Another deviation (WHY AM I EVEN POSTING THESE INSTRUCTIONS?) from the picture to your board: I put my resistors (the three that are right next to each other) in the "wrong" places. The brown-green-black-black should go in the MIDDLE of the three, and should be flanked by brown-black-black-blacks. The brown-black-black-red is the 10k, and should go by the 8-pin IC we soldered earlier. Neither the resistors nor the capacitors are directional, so you can flip them around however you want.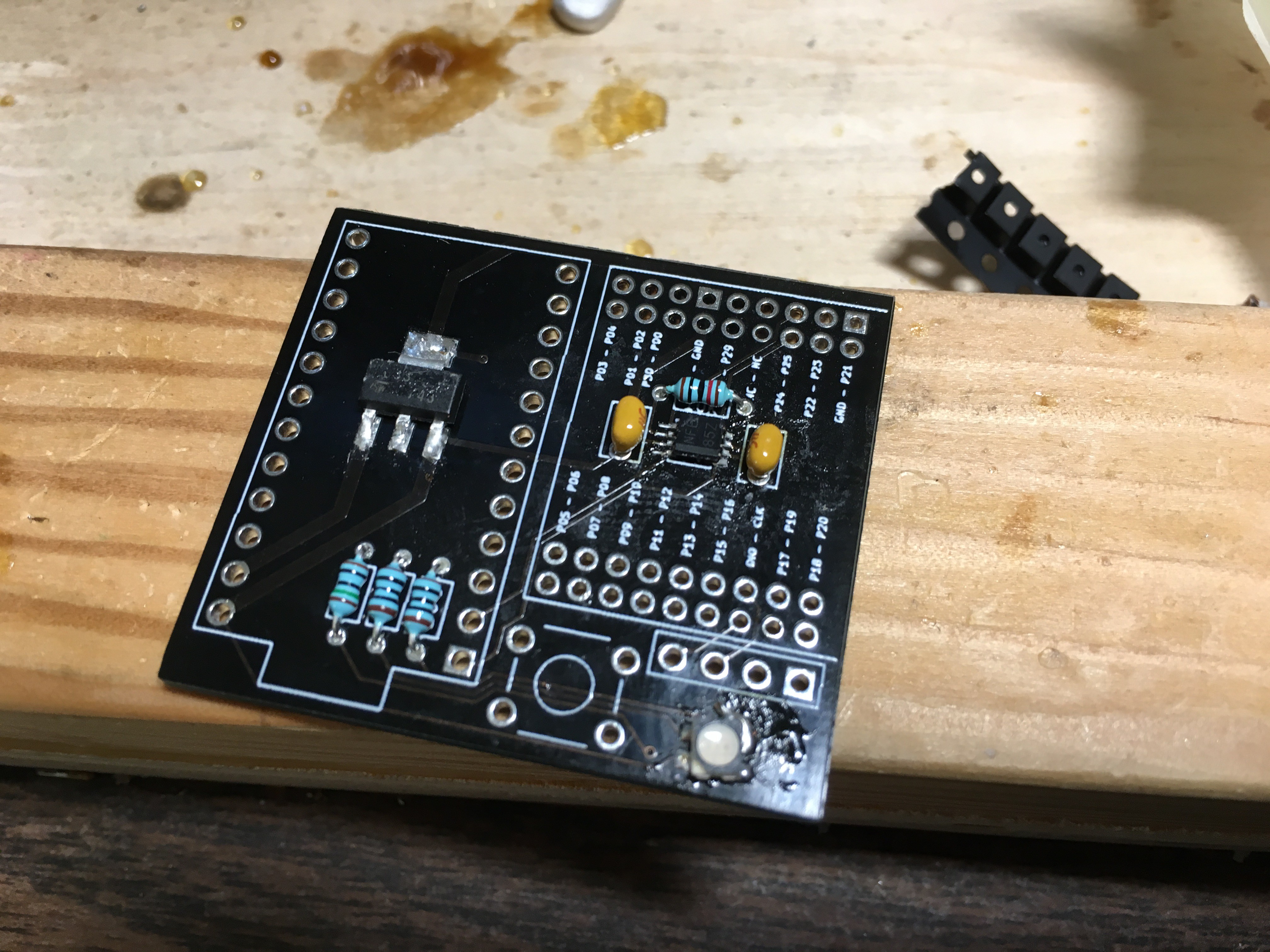




 Oleg Utkin
Oleg Utkin
 RasmusB
RasmusB
 Owen
Owen
 mr. mosby
mr. mosby
I can't imagine how my hands will rest on the wheels. Can you post an image showing how to use it and how the ergonomics are solved?