HyperIon
HyperIon-
PCB Designed and RFM
09/14/2018 at 21:08 • 0 comments![]()
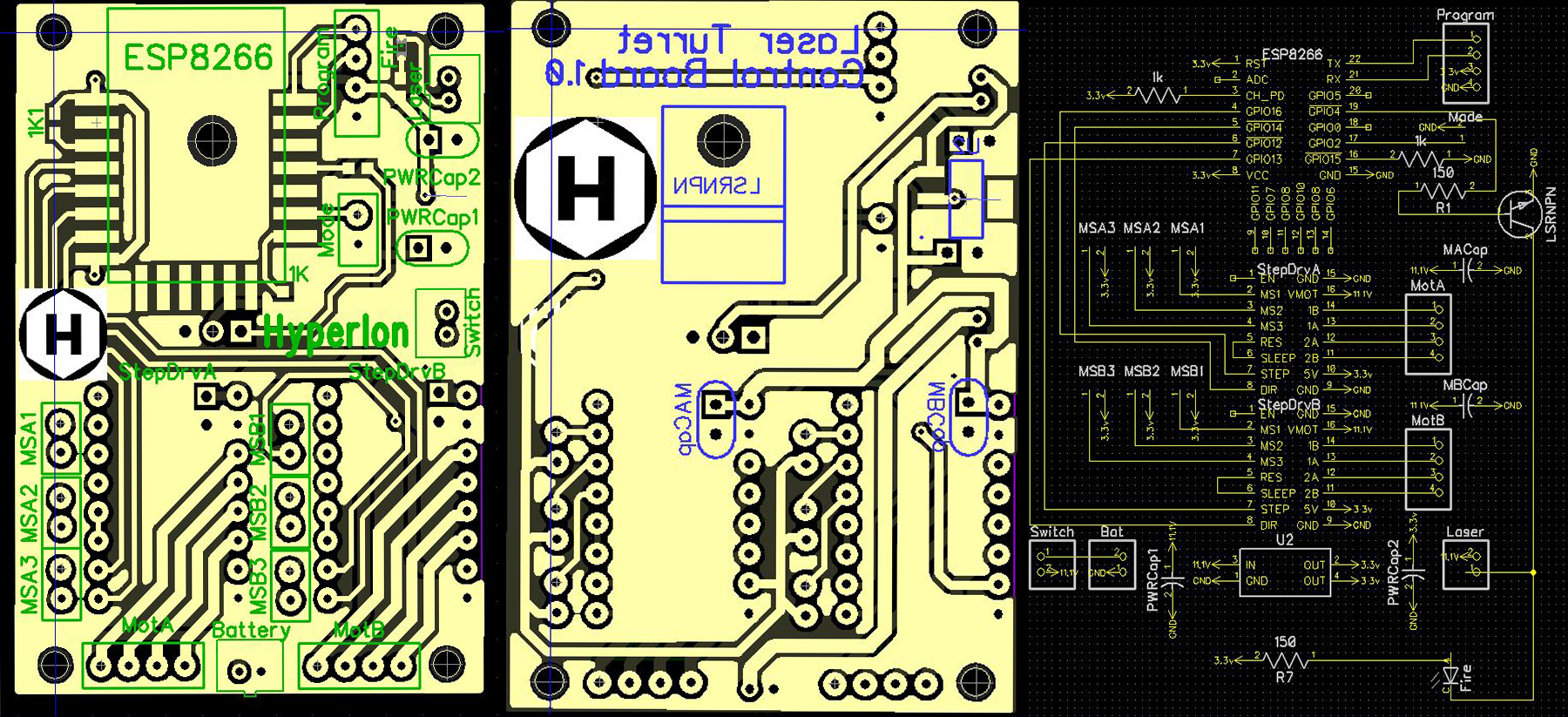
As of last night I finished the PCB design and sent it to allPCB to get manufactured. It should arrive 6 days from now on next Thursday. This is an incredibly simple PCB/circuit and would be great for anyone just getting into this stuff to try and make.
MCU:
The best way I could think of to coordinate a set of wireless turrets to work together in sequence would be to have them connect to a single wireless network where they all talk to the same server. My, and many others, defacto choice when you need wifi connection on a small and cheap board is an esp8266 12e. This board is small, cheap, and has just enough pins to control the rest of the systems. It and its cousin are the foundations of most of my IOT projects.
Stepper Control:
For stepper control I chose the A4988 stepper motor driver boards. Not much to say about them. They are solid for their price, which is why they have become such a strong standard in the 3D printer industry. The step size selection pins are connected to a set of jumpers, so they can be set after I assemble and test the design
Laser Control:
The module itself already handles all the current limiting for me, so all I have to do is get it roughly 12v power. I do that with a basic NPN transistor grounding a powered 2 pin JST connector. I also have an LED in parallel with this jst connector, which will illuminate whenever the laser would be powered, even if its not plugged in. This was I can test without the laser being enabled.
Let me know if you guys have any questions!
-
Prototype Two Design Done (almost)
09/12/2018 at 04:42 • 0 comments![]()
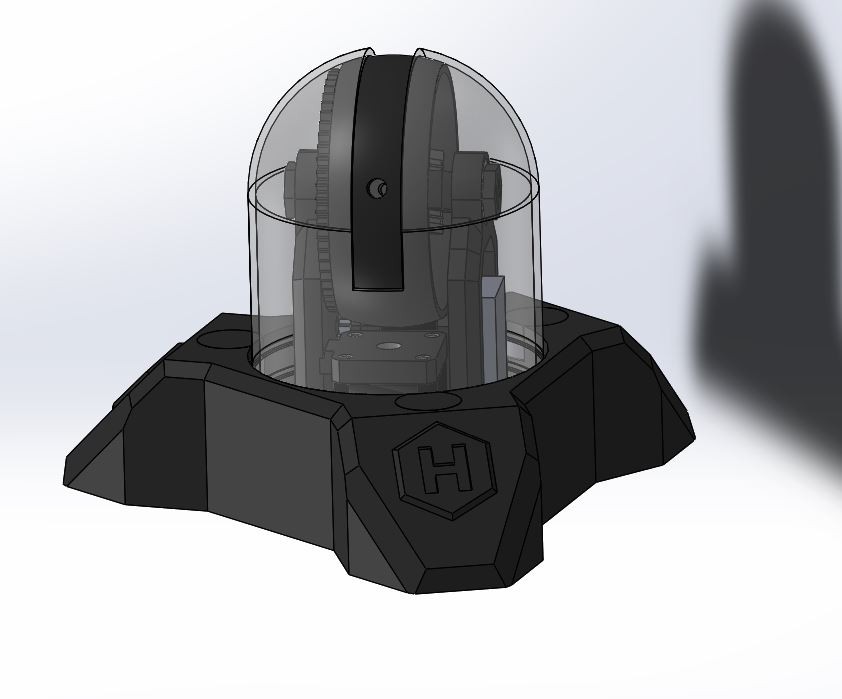
I just finished the design for the Laser Turret Version Two!
This prototype is far less of an experiment compared to the last one, and hopefully will be pretty close to the final model.
As you can see I have shifted around the mechanics. The tilt stepper motor is now in line with the laser, allowing the entire assembly to be dramatically thinner.
The advantage of this thinner design means I can cover the entire top section in a single "shroud". The advantage of THAT ability, other than aesthetics, is I can move all of the electronics up top. This dramatically simplifies assembly as well as giving me room for a bigger battery.
I also completely changed the way the top plate connects to the bottom base. In the last model I had a single bearing supporting the entire top plate. This worked well enough, but without a second mechanical constraint there was quite a bit of play. I knew that walking into the last design, but didn't want to mess with anything more complicated in the first model.
Instead of a single bearing on the bottom there are now three bearings which press into the side of the "shroud". These bearings are guided on the top and bottom by a set of rims which prevent the shroud from moving up or down. There is a small divot in the top ring which allows for bearings to be installed. I am concerned that this divot will cause problems down the road, so I will most likely have to change the way I install bearings. I might even do this before I print the shroud.
You'll notice I didn't design in space for a set of limit switches this time. That is because I plan to use magnetic hall effect switches, with a small magnet in both the bottom plate and the ring the laser is mounted too.
So far I am pretty happy with how this turret is going. It may not quite be to the standards
I hope to eventually hit, but its getting close. Its definitely one of the better laser turrets on the internet already.
My next step is to print off this model, design and manufacture a circuit, and write a basic library to drive it. After that I will probably only have a few small improvements to the design then I will make a few more of these! I would prefer at least four or five, though I will probably be limited by cost ($100 per laser turret). The more turrets the more notes can be played at one time.
Let me know if you have any suggestions!-HyperIon
-
Turret Prototype One
09/10/2018 at 00:00 • 0 comments![]()
![]()
![]()
Turret Prototype one is done! This prototype is mostly to explore the mechanics of the eventual design, as the design needed for this project will have to be very different than the vast majority posted online.
So I decided to start off this project by researching what kind of laser turret designs others had created. While I wouldn't say the designs are bad, the vast majority are simple pan tilt servos with a laser pointer. These aren't the most mechanically sound designs, and they have some very real limitations. Limitations which would make such a design unusable for this projects eventual goals.
So, the first step is to make a turret design from scratch. It won't be an incredibly complicated design, but I need something fast, precise, and designed to a high quality standard. The most important feature that I haven't seen in other designs is I needed the turret to be able to rotate 360 degrees continuously. The initial way I've come up with to pull this off is through the use of a set of geared down stepper motors. All of the electronics, including a battery, are designed to be mounded to one pivoting plate, with teeth on the base itself. By driving against these teeth, the upper plate can spin 360 degrees around continuously.
Unfortunately there are some problems with this first attempt. They are as follows:
- I didn't allow for enough space to fit the electronics under the base. That makes it so this prototype can't technically spin a full 360 degrees, though it can mechanically.
- I wasn't able to mechanically constrain the top to the point I would like, so there is a slight amount of "play". Not much, but more than I would like. This will likely lead to a total over-hall of the way I secure the plates together.
- I used a handheld laser pointer, as its what I had on hand. It works, but its heavier than I would like, and looks very unprofessional. I am most likely going to switch to a laser engraver diode.
- I am just not a huge fan of the exposed top. In my opinion it doesn't look very professional, and limits where I can put the electronics. A shroud would look better and allow me to move the electronics.
However, on the bright side, the motion is perfect. The laser is able to target quickly and accurately, exceeding my expectations. This is mainly what I was hoping to explore with this prototype. With a lighter laser this could only get better, so I am very optimistic for the next prototype design.