 siddharth.c
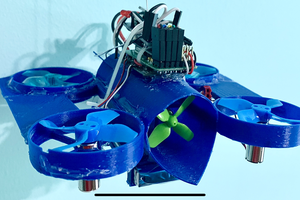
siddharth.cI created a 3D model on Autodesk Fusion 360 in 4 parts. The front flight controller cockpit , the two dihedral stalks at 8 degrees inclination and the tail which is a double motor mount .
I used corrugated cardboard around 5 mm as the wings . For such a winged air craft the CG is at Maximum Aerodynamic Chord (MAC) by 6 .
I used two brushed motors which are rated at 50,000 rpm for the propulsion system . It is powered by a 1s 3.7 V Lipo battery. This setup gives a thrust of 50 grams in total . This is only a few grams heavier than my setup.
Using the Pluto X flight controller and the API based SDK ,Cygnus I coded the two motors to use the accelerometer and gyro to keep the plane stabilised during flight.
To open drone experimentation to the world, Drona Aviation is crowdfunding for PlutoX on Indiegogo . Support them and help them bring it to life: https://igg.me/at/flyplutox/tinkerers


 Harry Gao
Harry Gao
 Shashank Shekhar
Shashank Shekhar