Intent
Remotely control a knob -- controlling GTAW amperage in this case -- using a tilt sensor to create a simple foot pedal. 3d printed gears and mounting allow adjustment of gear ratios and mounting style to suit a wide variety of motion tracking and remote control projects.
Result
Process
An immediate difficulty I encountered was that the gear generator linked from Hackaday seemed to require money to download models.
I found this DXF exportable gear generator online instead: http://hessmer.org/gears/InvoluteSpurGearBuilder.html
From there, I imported the model into InkScape:
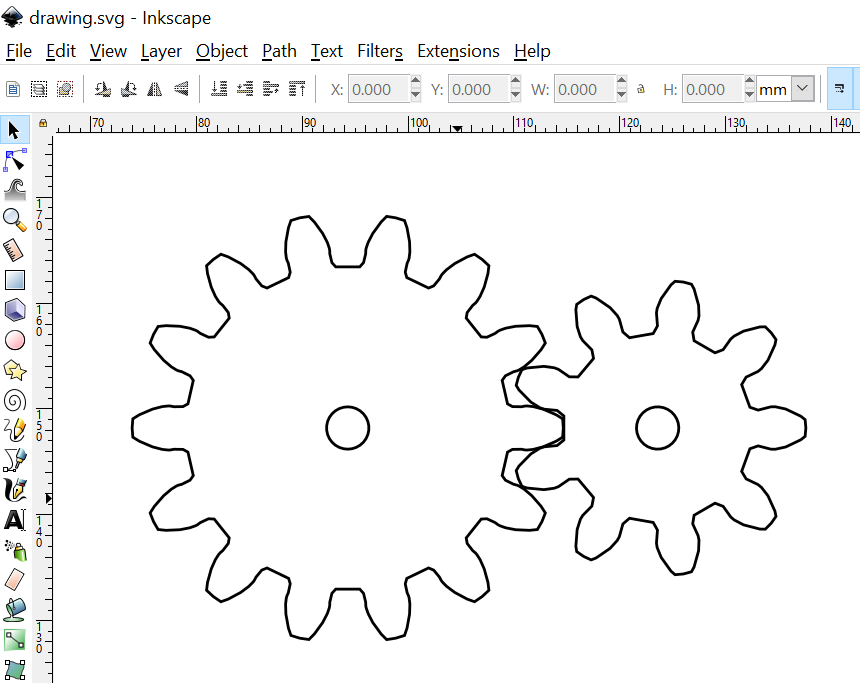
This allowed me to save it as an SVG, which TinkerCad can take as an input:
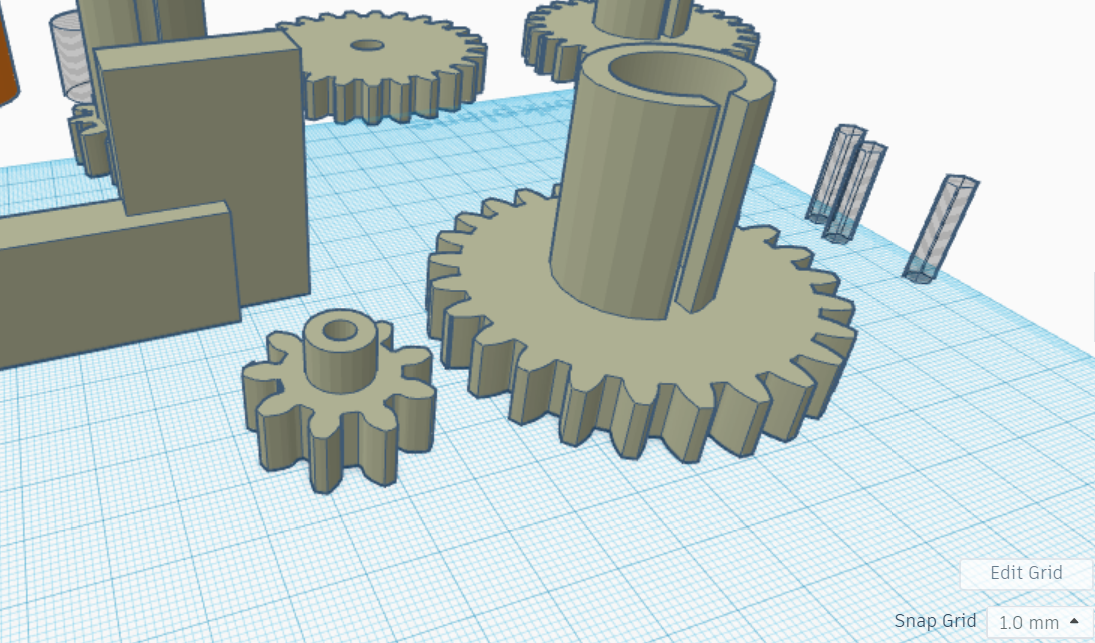
I originally was at a gear ratio of about (1 : 3) and using a memsic2125 accelerometer, but I ended up on (1 : 1.3) and an MPU6050 gyroscope to measure the angle.
In the end, i used an Arduino clone, an MPU6050 gyroscope, a SparkFun EasyDriver, a stepper motor, and the 3d printed parts.
I used the on-chip Digital Motion Processing of the MPU6050 to get filtered angle measurements. This is mapped to the min/max stepper limits coming from the potentiometers.
All in all, I'm extremely pleased to have a fun and hackable alternative to a purchased GTAW foot pedal for amperage control. It's pleasing to think that I can easily program in current pulsing functionality, a display, or more advanced features on a future whim. I'm working to remedy MPU6050 DMP FIFO Buffer Overflows on long stepper moves, general stabilization, and pulsed current routines next!

 aeropic
aeropic
 Corsix
Corsix
 Drix
Drix
that works well, was surprised how little lag there was between foot pedal movement and knob turning. Has other potentials also.