 Nicolas Guilbert
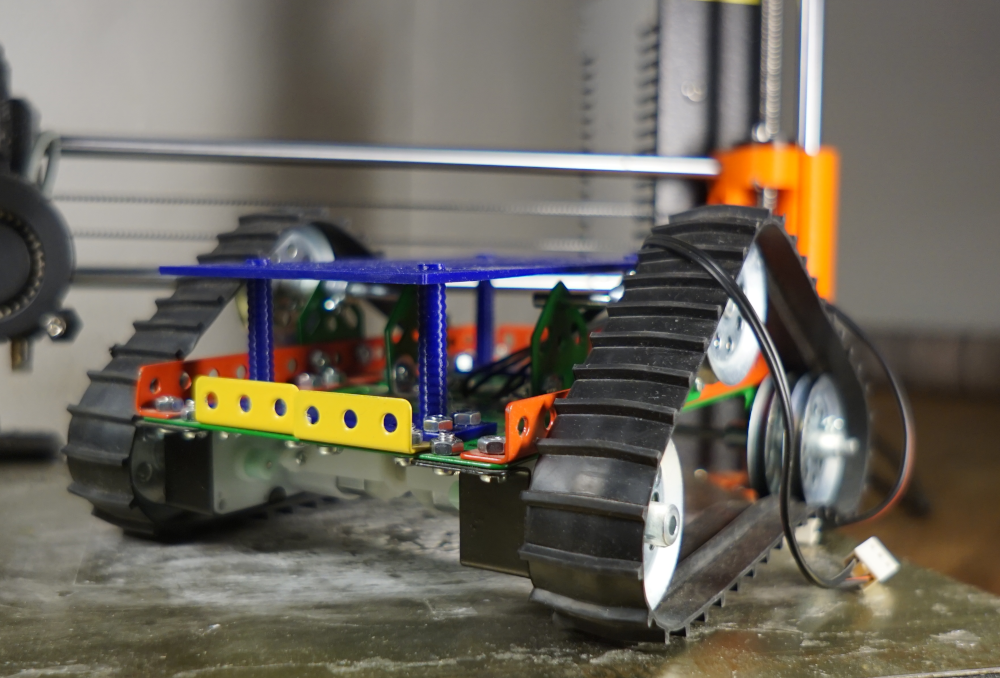
Nicolas GuilbertThe system consists of an Arduino Uno R3-based rover communicating via WiFi using an ESP8266.
The current version features an ultrasound distance sensor and a camera.
The rover polls its commands from a server which, if it has a public IP, can be accessed from anywhere. Commands are sent to the server via a web page and a REST interface.
All code is available on Gitlab.
The system was built to be as simple and accessible as possible and with the purpose of teaching programming and computational thinking.



 However, when these are printed in PLA as we do, the strength, precision and elasticity are far from those of the injection-molded versions of Lego. It sort of works, but the pins are too difficult for the kids to insert into the holes of the plates on their own and break after a while. Good enough to get started, but not a feasible way forward to our ultimate goal of building robots that can build robots.
However, when these are printed in PLA as we do, the strength, precision and elasticity are far from those of the injection-molded versions of Lego. It sort of works, but the pins are too difficult for the kids to insert into the holes of the plates on their own and break after a while. Good enough to get started, but not a feasible way forward to our ultimate goal of building robots that can build robots.
 The invention is in the public domain and is completely free for use.
The invention is in the public domain and is completely free for use.




 ... the idea being to make it an actual Dark Side device for remote sensing/possibly acting.
... the idea being to make it an actual Dark Side device for remote sensing/possibly acting. Discovering the wonders of the glue pistol!
Discovering the wonders of the glue pistol! Wearing the badge in a debate on girls in STEM at the annual "Folkemøde" on the island of Bornholm.
Wearing the badge in a debate on girls in STEM at the annual "Folkemøde" on the island of Bornholm.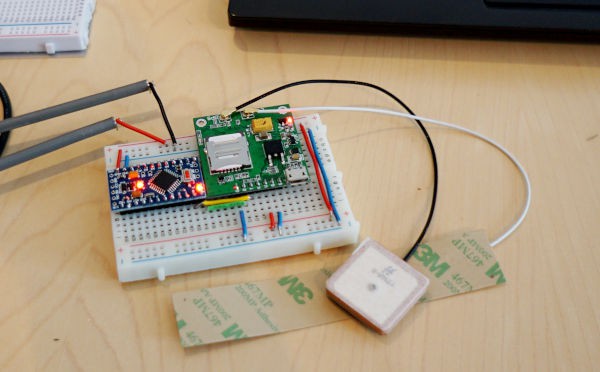






 RoboPandaPDX
RoboPandaPDX
 jean.perardel
jean.perardel
 silvio biasiol
silvio biasiol