 silvio biasiol
silvio biasiolThe main challenges of constructing the sailboat will be:
I hope you will like my project! Please if you have any suggestions feel free to ask me I’ll be happy to discuss and answer!
The goal is to build a tiny autonomous sailboat able to travel potentially forever, powered using solar panels and wind.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
The main challenges of constructing the sailboat will be:
I hope you will like my project! Please if you have any suggestions feel free to ask me I’ll be happy to discuss and answer!
This is a table with the main power consumption that I will have. I'm planning to use a camera and image recognition, in addition to the sonar, to build a simple but effective obstacle avoidance system.
component | power mW | utilization % (estimation) |
Arduino UNO/micro | 5v * 25mA/50mA = 125mW/250mW if active) 5v * 4mA = 20mW (sleep mode and hardware modifications) | 80-90% |
HRXL‑MaxSonar (ultrasonic rangefinder) | 3.3v * 3.1mA = 10.23mW | 40% |
IMU (inertial measurement unit) * 2 | 3.3v * 145-350µA = 0.725mW/1.75mW each | 100% |
GPS unit | 3.3V * 30mA = 99mW (average) 3.3V * 12mA = 39.6mW (for the antenna) | 10% |
DYMOND D 47 Servo (for the rudder) | 5V * 250mA = 1250mW | 50% |
SW5513-4MA Sailwinch Servo (for the sail) | 5V * 110-350mA = 550mW/1750mW | ?? |
So the total power consumption should be around:
1750mW + 1250mW * ½ + (39.6mW + 99mW) * 1/10 + 1.75mW * 2 + 10.23mW * ¼ + 250mW * 4/5 ≅ 2594.91mW ≅ 2.595W
An eolic vertical turbine with an efficency of 35% (a round down estimate from average efficency), diameter of 10cm, height of 50cm and a wind speed of 7m/s c.a. (based on the average wind speed in Italy) should produce c.a. 3.230W (source: http://www.windstuff.org/calc/calc.php)
If, in addition, I use 4 solar panels 85x115mm of 18V and 100mA I should get:
18V * (100mA * 4) ≅ 7.200mW = 7.2W and supposing an efficency of 40% (day/night, circuit losess, water, dust, etc..) I should get c.a. 2.88W
These are just estimations of course! Please feel free to correct me if I've said something wrong :)
So I managed to attach the drop keel and the rudder to the hull. I think it came out quite nice, here's some pics:


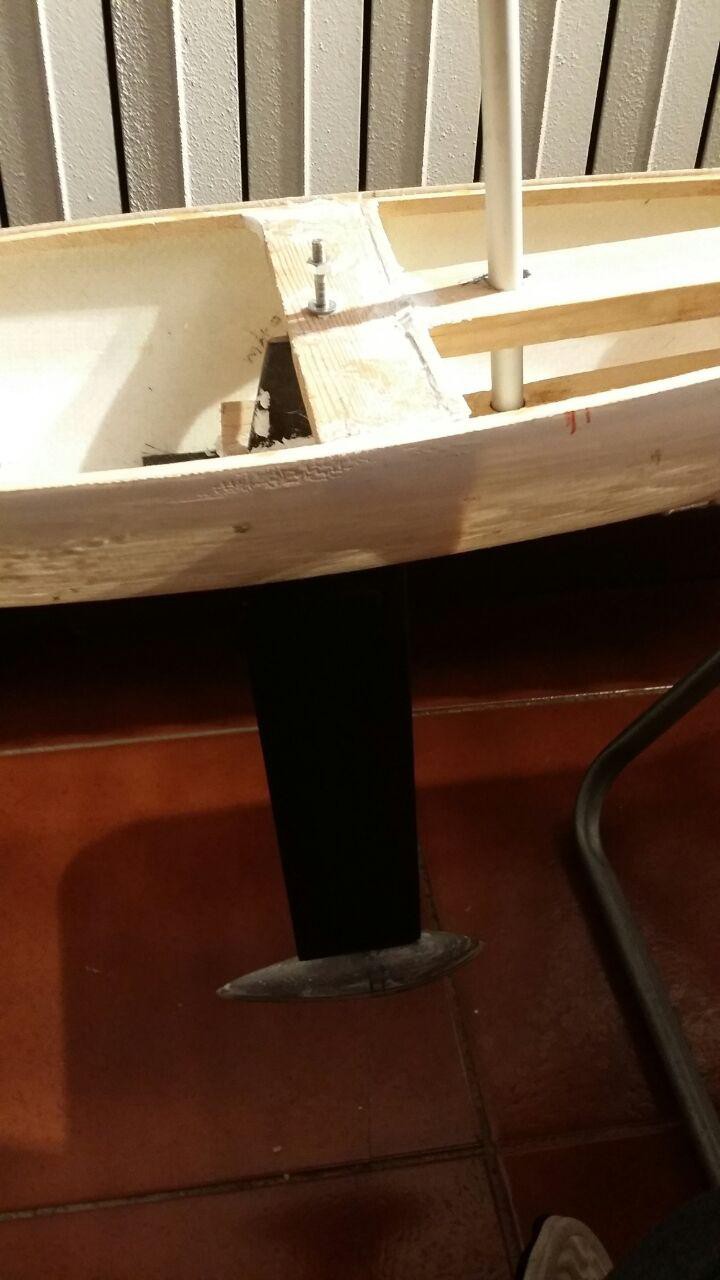

more info on the howto will come under here ;)
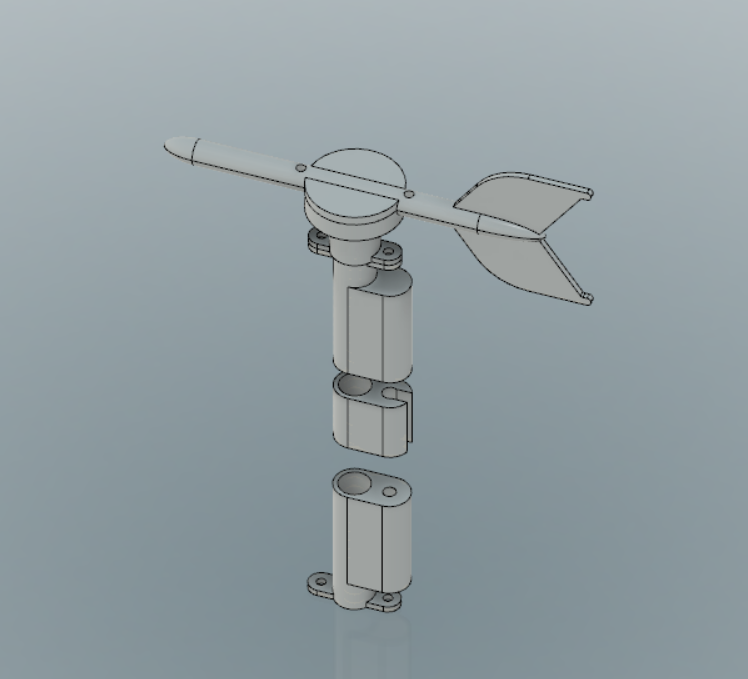
I've designed with autodesk fusion 360 the anemometer that I would like to use. It is attached to the mast. It is composed by two main hardware parts:
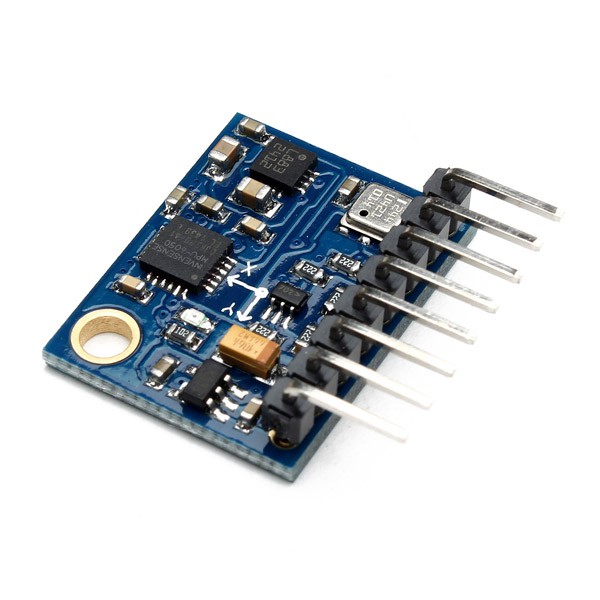
- The GY-87 IMU
- the 12.4mm 300Rpm 6 Wires 6 Conductors Capsule Slip Ring 240V AC for Monitor Robotic SRC012C
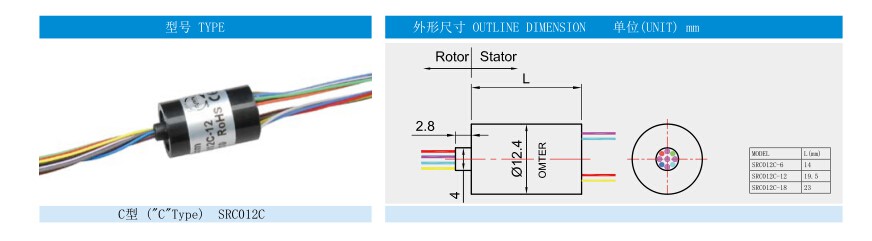
I didn't know about the existence of the second one, it is a very useful piece that allows to connect electric wires from two rotating components.
Both of them can be purchased for a few dollars on the web. The IMU will provide the wind heading and is placed in the anemometer rotating part:
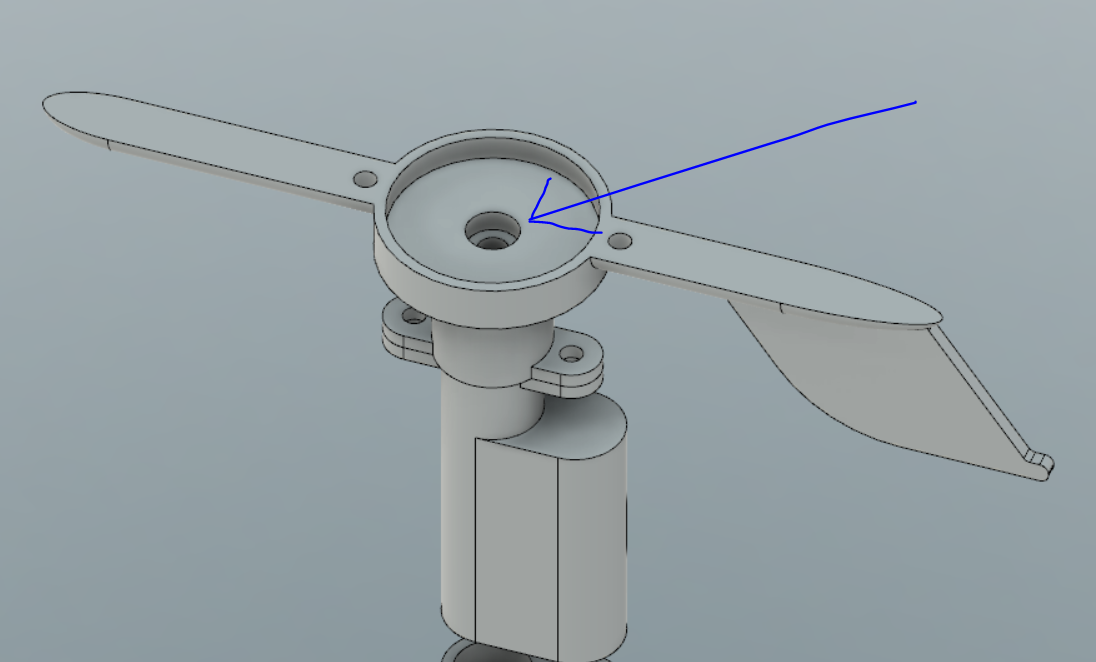
while the second one will be placed between the rotating part of the anemometer and the base.
Here's the page with the STL files:
http://www.thingiverse.com/thing:1916259
I'm wondering if to add a dc motor a the front extremity of the "arrow" in order to get some more electricity, probably in the next log I will add it :)
Hello, I'm writing this log to inform everybody that unfortunately, I will not be able to finish the project within the concourse deadline due to university apprenticeship and exams. However, even if a little bit slowly I will continue to update and work on this amazing project in which I really believe. I would like to thank Hackaday and its users for the opportunity they have given me! I will keep you posted :)
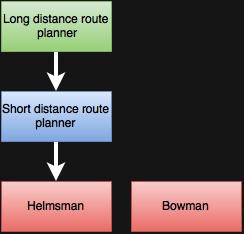
The software of the sailboat will be based on a layered system which can be seen above. The behaviour is based on a incremental process of data refinement level by level. The main entities will be:
Furthermore it can dynamically change the route in case of repentine changes of the wind conditions or if the boat has come too far from the next intermediate objective or if an obstacle is approaching. It gives as output the desired direction to follow in degrees) to reach the next intermediate objective.
The following picture represent a typical LDRP and SDRP interaction:
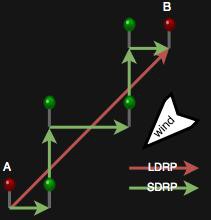
I'm developing a little Java software that will visually simulate the path choosing algorithm in optimal conditions. It will also show the dynamic changing of the path in case of wind direction changes. Hopefully I will finish it soon and upload both the code and a demo version :)
Thanks to @Leonard that pointed out the possibility of creating a redundant system!
Redundancy is basically the duplication of critical components of a system with the intention of increasing reliability of the system.
In my case I'm going to use two Arduino that do the same task: sail the boat. In the event that one fails the other could take his place.
One is gonna be the master Arduino which in normal conditions operates the sailboat by himself. The other one is gonna be the slave Arduino that will provide its sensors readings in case of failure of sensors of the master Arduino or will substitute the master Arduino in case of complete failure. They will be located in two independent waterproof enclosures.
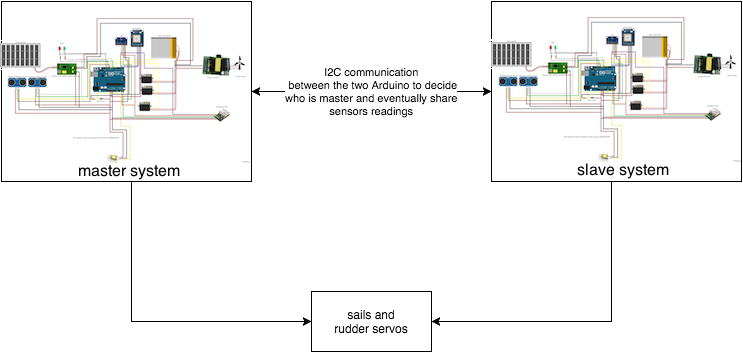
The only parts in common are the I2C bus between the master and the slave and the servos operating rudder and sails.
The slave Arduino will be in standby mode most of the time in order to prevent as much as possible power consumption, periodically it will wake up to send a signal over the I2C to the master to see if everything is working fine. It can also be activated by the master in case of necessity.
The master/slave choosing policy is quite simple: the slave periodically check if the master is alive and if it does not receive any answer switch to master mode. From its part the master periodically checks if the slave is not in master mode, if this occurs the master automatically switch to slave mode.
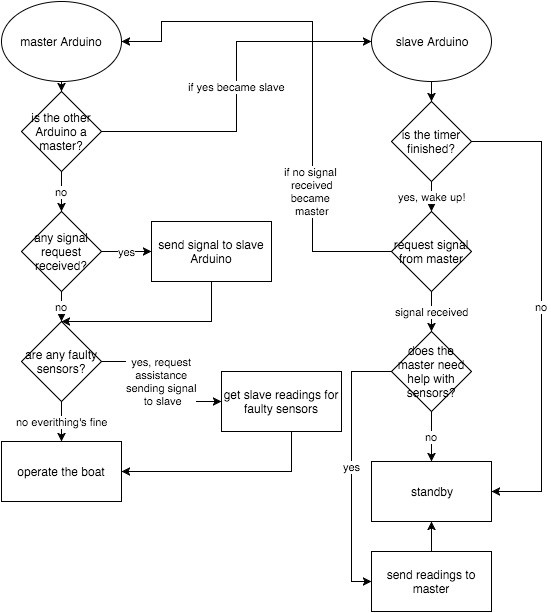
There can be a problem in the scenario in which the connection between the Arduinos fails but both of them are still operating. In this case there will be two master Arduino in competition for operating the boat. I'm evaluating two options:
If you have any questions or suggestions please feel free to comment :)
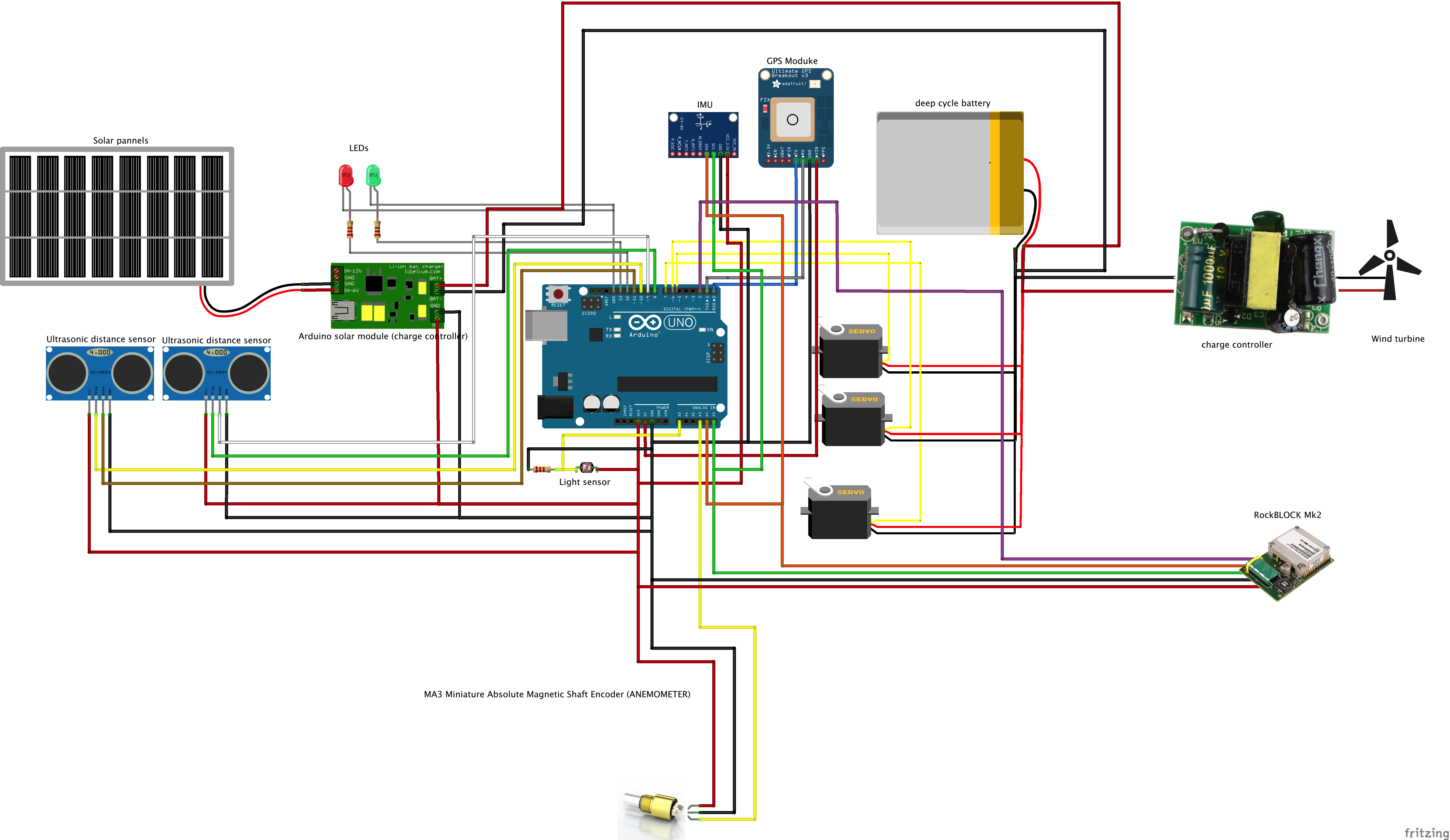
So here's the first electronics diagram.
It's schematic (and simplified) but enough detailed to give an idea.
It doesn't represents all the hardware parts that I've decided to use but the main ones are here. So here are the new additions:
EDIT:
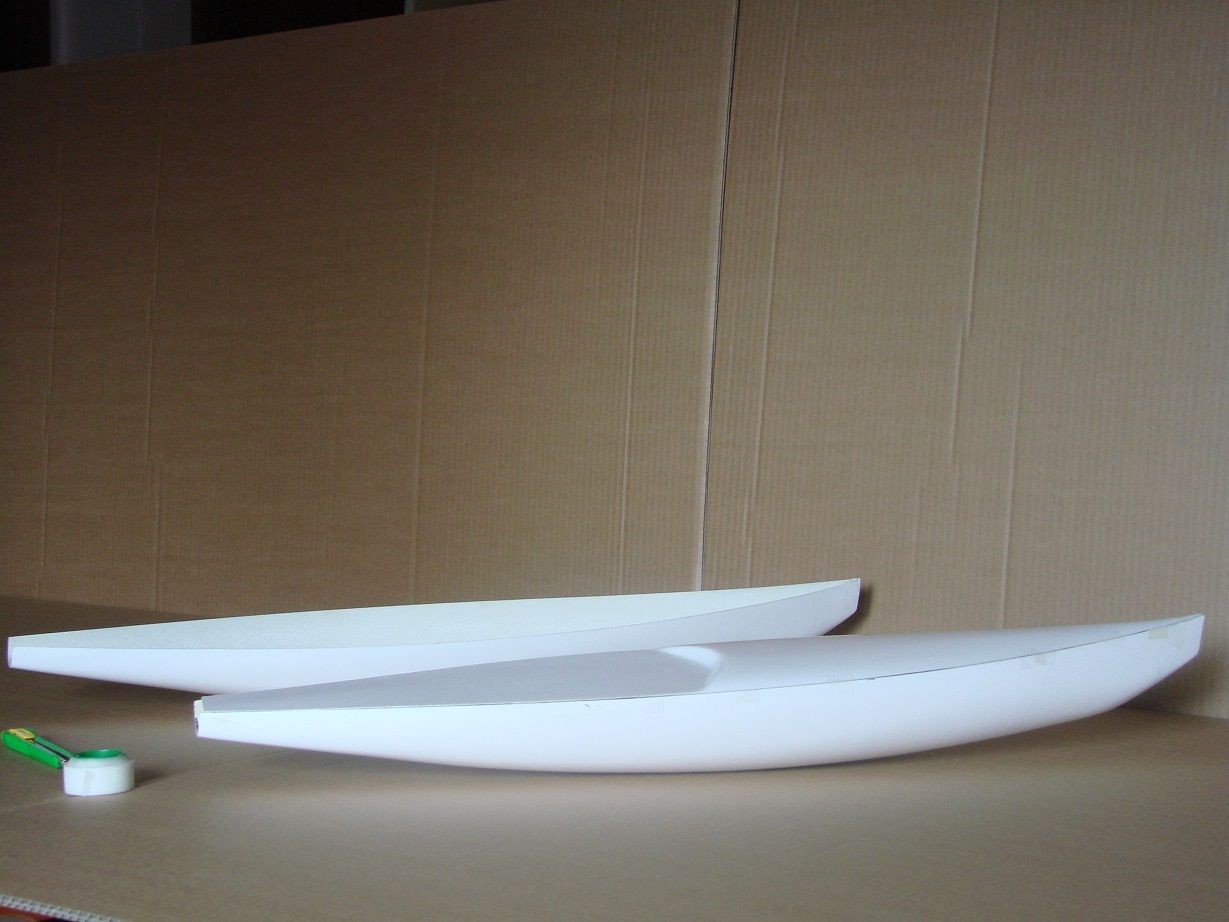
I found this hull on the web. It is quite good to me because of the possibility to customize whatever I want.
The purchase price amounts to € 29 plus € 9 of delivery charges.
If, like me, you’re not a nautical expert but you wish to build up everything from scratch,
my advice is to search the hull on websites like ebay.
The best keywords to use are: “boat hull”, “fiberglass sailboat hull” or similar.
You’ll have a chance to find many boats with interesting designs with could be traded close to you allowing you to save money on delivery charges.
For the realization of the internal frame I’m going to use a 3d printer in order to optimize mass distribution and secure electronic components.


I just wanted to thank @Durvir for letting me know that there are several “sailbot” competitions all over the world.
I found a very interesting source of information (regarding both hardware and software), to witch I’m going to take a deep look :)
Here it is:


There is similar to the project I worked on. I took a similar boat to the World Robotic Sailing Championships.
https://www.hackster.io/anemoi/lean-green-rc-sailing-machine-2cdde5
[this comment has been deleted]


Nice work. Im very envious....I started a very similar project some years ago. Got hull, sw and electronics/ servos done, but never finished ( rigid, symmetrical) sail :( Good luck. https://www.facebook.com/dave.merrett/media_set?set=a.102826460158.113015.776150158&type=3
It's a shame you didn't finish it! If you decide to restart building it I will be happy to help you with code and suggestions!

What are your considerations for choosing between the Pi Zero and Uno?
Normally I would go for an Arduino because it's easier and it's real time (instead of the Pi that can have some latency because of OS subroutines delaying the calculations of the boat) but since I recently stumbled across the zero I'm evaluating the possibility to use it mainly because it's quite simple to implement GPS functions and it can do more "high level" tasks without adding extra hardware. Anyway 90% I will go for the Arduino or Ardupilot or simiar... Thank you for the question, hope I've been clear and sorry for the bad english
Your English is fine enough! I'm sure I can't speak your native tongue. I appreciate your answer and definitely agree with your thoughts. I just can't get my head around the Pi, yet. I think most projects do just fine without a Linux OS overseeing everything. I think that non-OS projects are much simpler to get rolling (or sailing, in this case).

There are some never-finished projects on the internet. They have good advises:
- http://diydrones.com/profiles/blogs/sailboat-autopilot-design-for-ardupilotmega

That's amazing! Thank you I'll have a look! :D The second one gives pretty useful advices for the wind vane..

Are there any autonomous sail projects in the RC community?
I've not looked around to be honest but I think that probably if you look around you can find some :)
There is a World Robotic Sailing Championship going on for several years now. Have a look at http://www.roboticsailing.org/ for a collection of the past events. Maybe this helps you finding more information on autonomous sailing.

 Juan Sandubete
Juan Sandubete
 dennis
dennis
 Alpha Charlie
Alpha Charlie
As an alternative to sail check out wave based propulsion. The motion of the waves will propel the craft and if you toss in some linear generators it will also produce power with the wave motion. The sea can be vicious so the fewer external moving parts, the better.