Bill Eckman
Bill EckmanSee in depth connection examples and hardware details at the GitHub page. https://github.com/wmeckman/LCDC1000
Intro Video:
The LCDC1000 is open source hardware licensed under the Creative Commons Attribution-ShareAlike 3.0 Unported license.





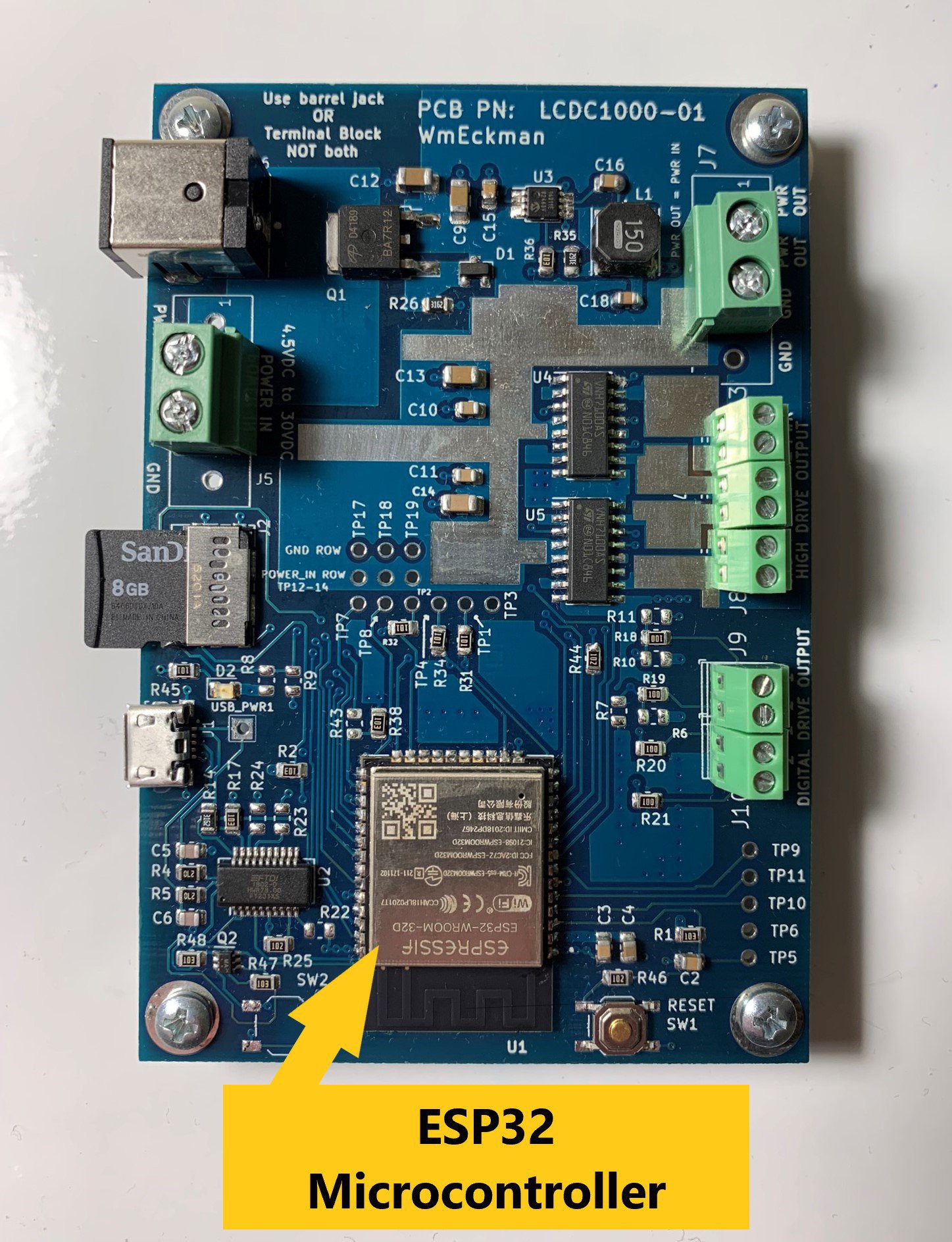
An ESP32 based controller that can drive any kind of LED strip, or motor. Includes microSD, USB-UART, and large voltage range input.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
See in depth connection examples and hardware details at the GitHub page. https://github.com/wmeckman/LCDC1000
Intro Video:
The LCDC1000 is open source hardware licensed under the Creative Commons Attribution-ShareAlike 3.0 Unported license.
LCDC1000_01_schematic.pdfRevised schematicAdobe Portable Document Format - 344.95 kB - 06/07/2019 at 02:13 |
|
|
61A7C73F-EAA1-4E06-AE58-C8E41C3DF97E.MOVDriving LEDs and a 12V motorquicktime - 10.52 MB - 05/03/2019 at 00:01 |
|
|
|
Adobe Portable Document Format - 363.11 kB - 03/31/2019 at 23:50 |
|
|
6-6-19: I updated the schematic and layout with the following changes.
REV -01 Changes:
1. Changed high current drive connector to 2.54mm spacing.
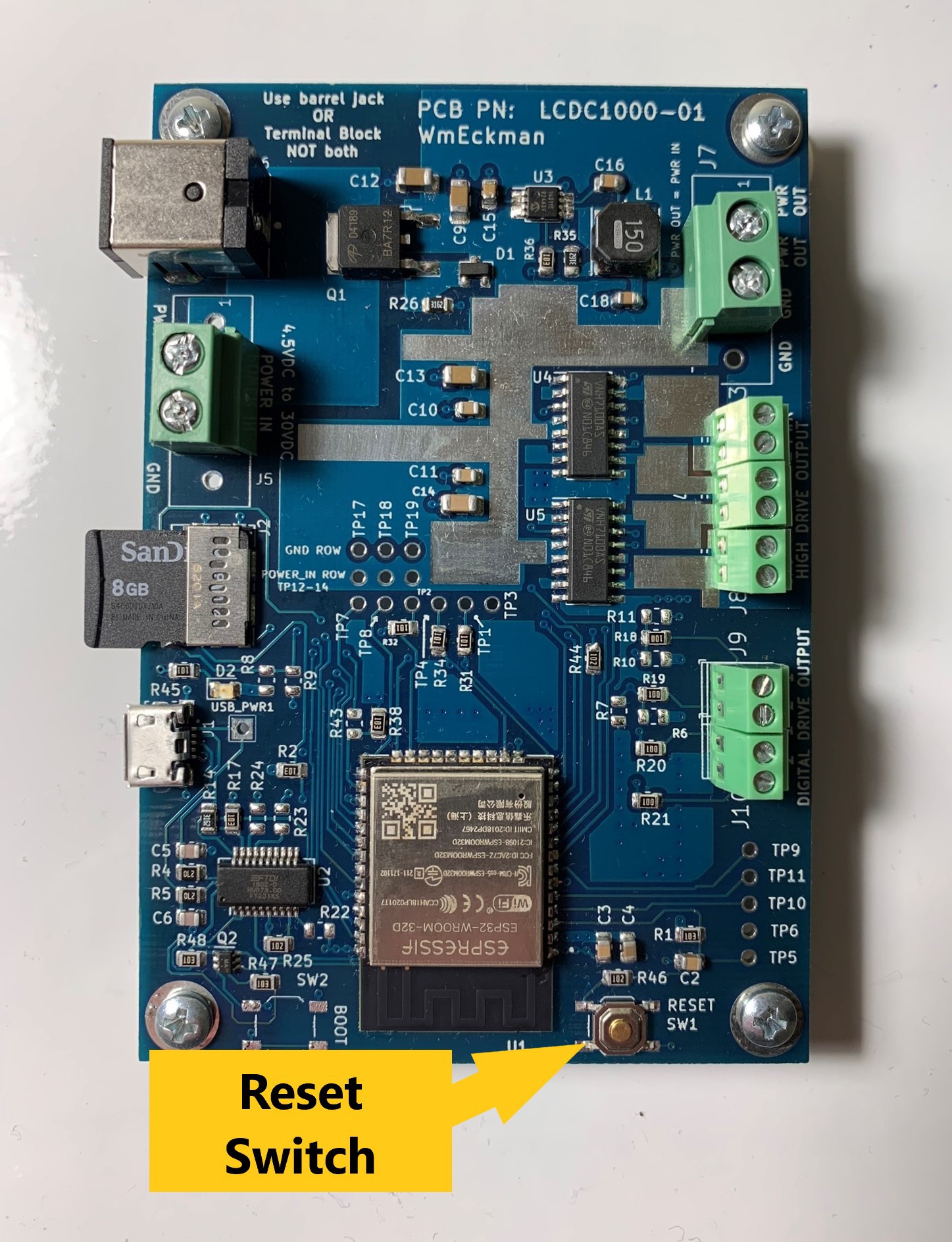
2. Changed D1 to 4.3V.
3. Added reset switch.
4. Added GPIO0 switch for bootloading.
5. Changed LED connector to connector
with 2.54mm spacing.
6. USB device changed to FT231.
7. Added ESPtool compatible reset circuit.
8. Changed R12 to 10k.
9. Changed green LED to a different type.
So far the testing is going well without issues. ESP compatible reset circuit makes uploading files a lot smoother.
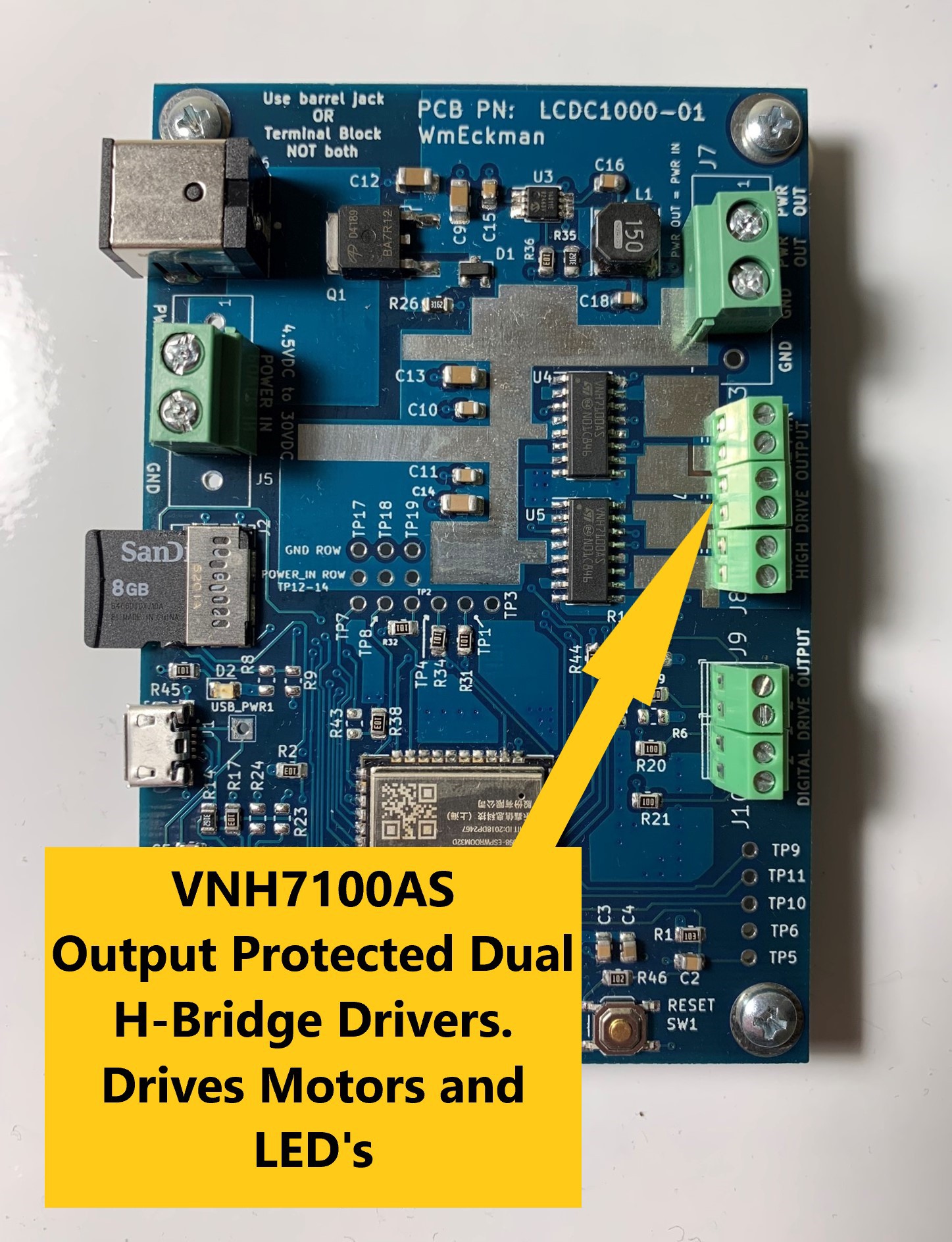
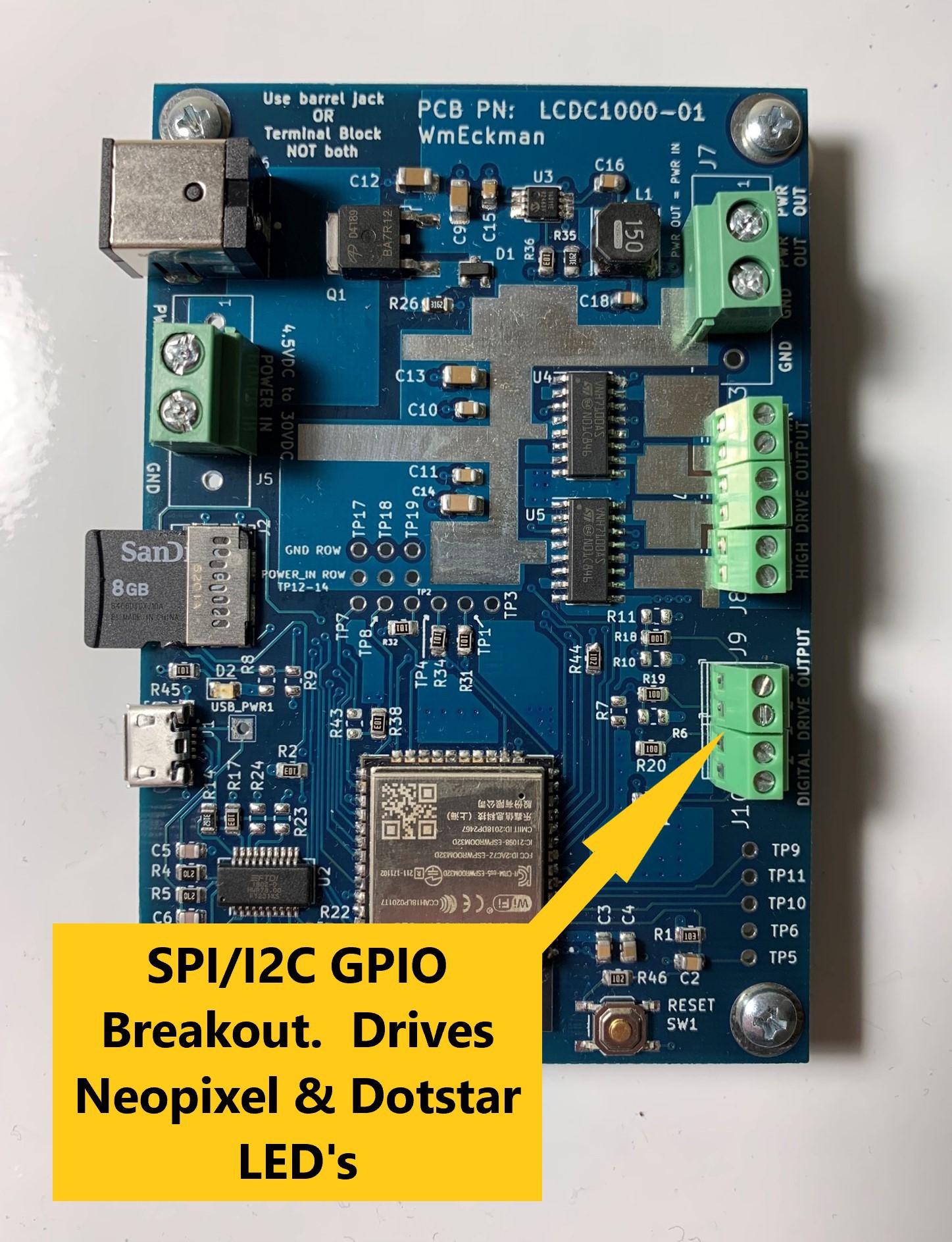
So far so good with the debugging. I’ve verified that the board can drive Neopixel dotstars, RGB, RGBW leds and motors. I also verified that the SD can be used in MicroPython.
The board is assembled. No major issues. There are three minor issues that will be fixed in the next revision of the PCB.
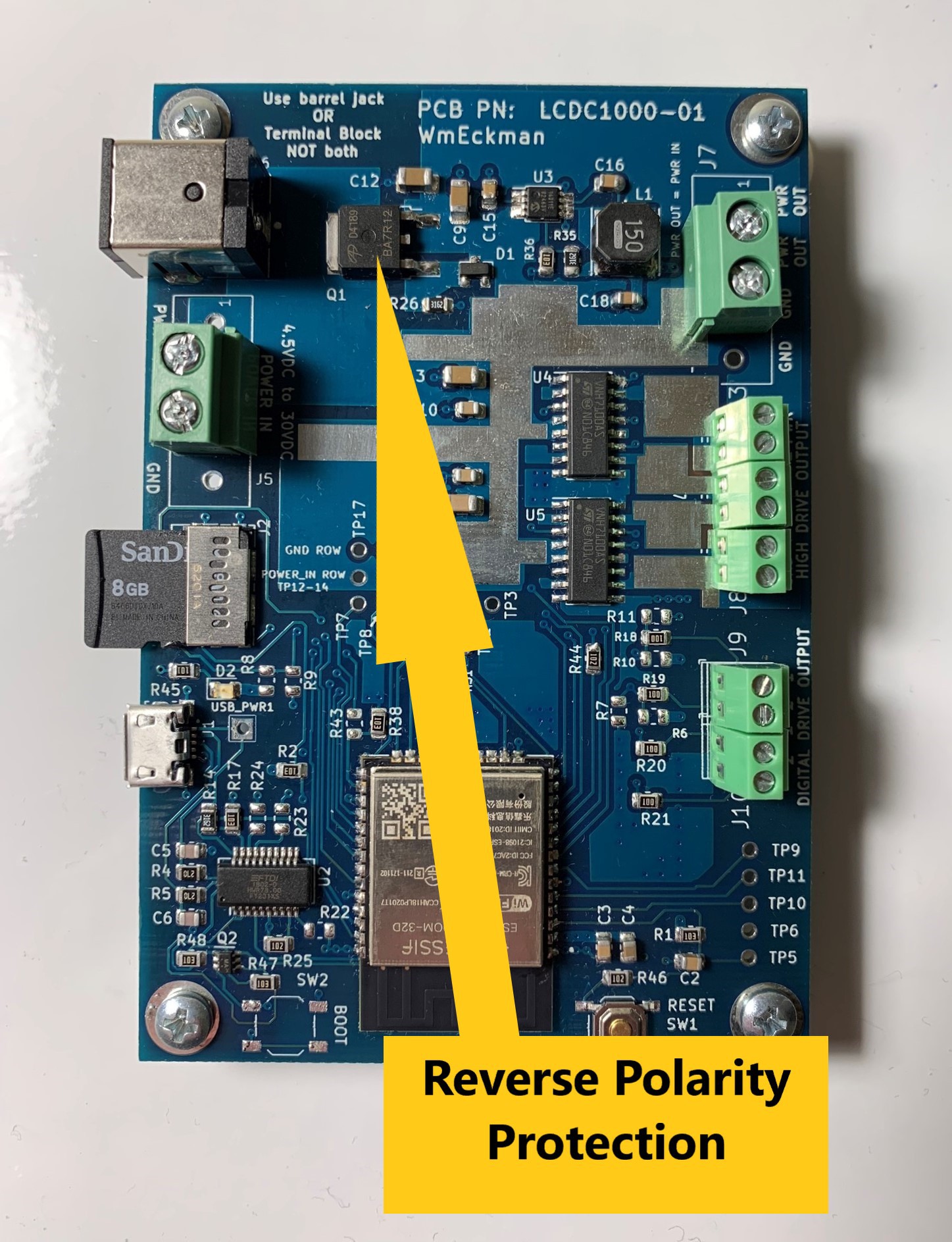
I powered the board from a 15V power supply. No issues with power were found.
I loaded Micropython on the ESP32 over the USB port. No issues were found. I successfully setup the ESP to connect to the network over wifi. I will continue development and testing.
All parts and PCB's have been ordered. I'll be assembling boards soon. I'd like to develop an open source web based interface for controlling LED strips, and I'm looking for contributors. The web UI is for non-coders who want a higher level of programmability than is currently available on other controllers. If you're interested, let me know. I plan on putting this on Tindie when it's ready. In addition to the standard color and pattern controls, it would be cool if the web interface had advanced features like:

 Zoé
Zoé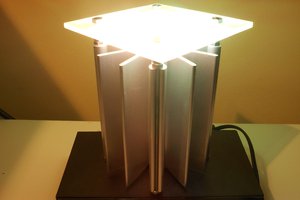
 Enrico
Enrico
 Alexis
Alexis