This is going to get long, so I'm going to break it into chunks that you can skip to if you are interested in a certain part of the project.
- Design Goals
- What Went Well
- What Went Poorly
- Future Plans
- Hard-Earned Tips
Design Goals
I didn't have all that many specific goals when I first started thinking about designing the printer, but there were a few broad things that were important to me.
The first priority was to make a properly built machine. What I mean by that is I didn't want sloppy bearings, misaligned belts, a wobbly frame, or unnecessary cantilevered forces present in the design.
The second priority was price. If I couldn't make it affordable, then I simply couldn't build it. However, this goal conflicts with the first goal of making a properly built machine. I didn't have an exact budget, but I wanted it to come in at $350 or less.
The third and final priority was modularity. I absolutely love my Prusa MK3 (thanks Hackaday!), but it's a workhorse that isn't designed to be constantly modified and tinkered with. I wanted to make my delta a platform that could serve any purpose that fit its motion system.
What Went Well
These effector arms are awesome: https://www.filastruder.com/collections/electronics/products/12-magballs-6-360mm-arms-for-delta-smarteffector. They are stiff, super smooth, and have surprisingly strong magnets. Thanks to those magnets, it will be easy to create different effectors that I can swap out quickly and easily.
The meter-long 20x60 OpenBuilds rails serve as both the frame and linear guides for the printer. The whole printer really hinges on these rails. It would cost WAY more to build a printer this size with quality smooth rods and bearings.
I used 4 V-wheels for each carriage to guide them up and down the rail. They only cost about $20 for a pack of 12 off of Ebay. In my opinion, getting knock-off wheels is the way to go. The wheels I got work well enough and saved me $40 compared to the genuine OpenBuilds ones.
Surprisingly, I was able to use an 8-bit board to run the whole thing. I know it could move much faster and at higher micro-stepping if I upgraded to a 32-bit board, but an Arduino Mega and Ramps 1.4 board combo only cost about $20 compared to a Duet 2 Maestro that costs about $130.
I used crowned pulleys to keep the belts centered without flanges. If you're unfamiliar with the magic of crowned pulleys, there is a good explanation here: https://woodgears.ca/bandsaw/crowned_pulleys.html. They do their job well and the belts don't grind against any flanges.
Putting an E3D Titan directly on the effector actually worked out pretty well. I know I'm limiting myself a bit when it comes to acceleration and jerk, but it's still very nimble. Also, I like not having to deal with a super long bowden tube.
Using MDF to hold the frame together at the top and bottom was a cost-effective way to make a very rigid frame. It only cost about $12 to get a 2x2 foot 3/4 inch thick slab of MDF, and my awesome brother was able to get it routed for me on the machines he has at work. Thanks, Bro!
What Went Poorly
OpenBuild's 14-tooth pulleys didn't work out like I had hoped. I might be missing something, but the 3 pulleys I ordered all had incomplete threads for the set screws. I was able to run a normal m3 bolt through a couple times to clear the hole a bit, but I still stripped the heads on a couple of the set screws. It's not that big of a deal, but for $5 apiece I would expect something better.
My belt clamping mechanism also needs some work. I patterned a GT2 profile into the carriages, which worked well enough, but how snug the belt fit into the profile was inconsistent from print to print. Sometimes it was uncomfortably...
Read more »
 secretbatcave
secretbatcave
 finallyfunctional
finallyfunctional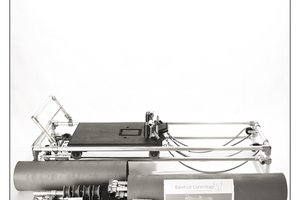
 joseph
joseph