 John Loeffler
John Loeffler

0%
0%
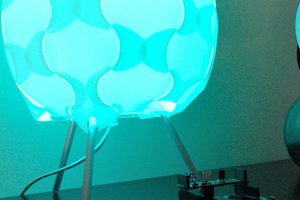
Lumos - Spotlight Drone
A GPS controlled Spotlight Drone
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests










 Michał Nowotka
Michał Nowotka
 Ronaldo Rezende Junior
Ronaldo Rezende Junior
 bobricius
bobricius
I like the insights you are sharing here. It reminds me of https://www.mippin.com/best-spotlight/