 Made In workshop
Made In workshopThe GT2 belt in combination with the nema 17 stepper motor is currently the most common form of linear motion for 3D printers.
This combination offers an economic solution to linear motion for most 3D printers, however it is not without its disadvantages.
- The belt can stretch over time,
- The gantry can overshoot, and
- Outside elements can interfere with motion cause or X and Y.
Most of the time the Z-axis has been driven by a lead screw. The stepper motor is attached to the lead screw by means of a coupler. Out of all the axis, the Z-axis is the most stable, as it is not affected by the above mentioned points . Although lead screws can be incredibly accurate, the main disadvantages of them, and ball screws in particular, is that they can be quite costly and very slow. The slow speed is not an issue for the Z axis as it only needs to move less than one 1 millimeter per layer. The only change with this movement is active bed leveling which means the motor is active all the time but the speed will remain slow.
For example, a 20 millimeter calibration cube with 15% infill would take up to an hour to print compared to the 15 to 20 minutes it would take to complete on a belt driven unit. The quality as well as the bridging capabilities are much better, however this comes at the cost of speed. But if it is quality you are looking for, this is not a bad thing.
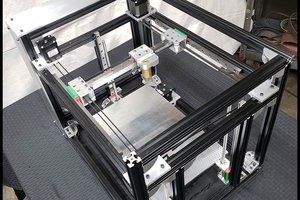
Converting a traditional belt driven Fused Deposition Manufacturing (FDM) printer to a ball screw creates a 3D printer with a completely new personality. We are talking some serious frontal lobe modification here. From MIW’s mini CNC, Quintin Mallac started replacing the unipolar stepper motors with bipolar ones.
“The current motors had bridged wires and were driven by a CNC controller that only had an old serial interface. Modern computers don’t have serial ports anymore and I was not in the mood to try and find one.” Says Mallac.
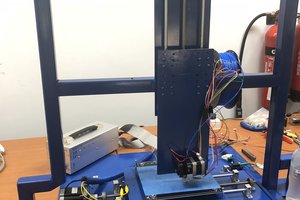
The Mechanics were the first thing to be changed. The old stepper motors and the cnc controller were removed and replaced. Mallac says he elected to use salvaged nema17 motors available from MIW’s salvage store. “They were half the price of new nema17 motors and as a bonus they already had Du Pont connectors on the wiring” The Ramps 1.4 3D printer controller board was chosen as there was a salvage unit available from an old prusa clone but the firmware had to be reloaded.
“Apart from some creative wiring management, the new motor installation was not the hardest part. The firmware was all that stood between us and a working printer.” Mallac smirks.
A pre-configured version of Repetier firmware was loaded by going into their web site and used the wizard to generate the configuration files.
The machine was powered up final configuration was done on a live unit:
- Used the M119 command to check the indication of the end stops to make sure they were triggered at the appropriate times. The X min and Y min values had to be inverted The z probe was wired straight to the Ramps, which meant a voltage divider was not needed to install the z probe.
- Checked the direction of the motors. When movement was reversed, the connectors on the ramps board was swapped around. At first the motors were moving too fast and seized. The feed rate was dropped down so that the calibration could continue, but increased the rate later. The online Prusa calculatorwas used to calculate the number of steps for the stepper motors.
The final result was a 3d Printer using a very rigid CNC gantry. The printer is incredibly accurate but very slow. The printer has a large X and Y area (340mm x 530 mm) with a Z height of only 70mm high. But combined with the bigger X and Y, the overall volume is huge.
"Future plans for MIW-QM_3DPRT-v2 include dual printing with...
Read more »



 Shane Hooper
Shane Hooper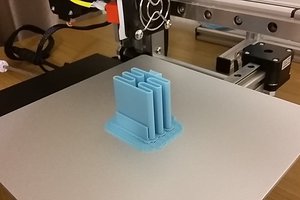
 Lukas Koch aka Ast
Lukas Koch aka Ast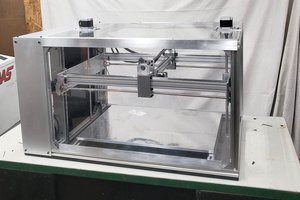
As we continue to use the machine we have noticed the following nuances or characteristics on the machine. During a 30 hour printer at 0.2 mm resolution the steppers motors were get hot. We did turn the voltage on the stepper drivers and this did drop the temperature somewhat. We then installed heat sinks (Lumps of aluminium we had around and that did improve the temperature situation. We will document this during the week.