 Eric
EricThe Power Racing Series limits competing vehicles to look like a "children's ride-on toy", operate on less than 48V with a maximum power input of 1440W, and cost around or less than $500. There are some other rules regarding safety and other build conditions, but those are the main ones. The features I've planned for the final result have changed over time due to budget constraints, scope-creep realization, and my desire to just get this finished because it's been in limbo for a long time. The unique features have boiled down to capability to remove the steering wheel and control the car wirelessly, "drive-by-wire" brakes (to allow for steering wheel removal), and enough infrastructure built in to allow for bolting on components for autonomous driving in the future.
0%
0%
Small Car EV
Power wheels overhaul to compete in Power Racing Series
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 I had a few iterations of shoulder levers that didn't feel right. The biggest problem was finding the right shape to get a good amount of contact with my pointer fingers while also allowing for a significant range of motion. In the end, I went with a simpler straight-bar shape but that extended a little bit deeper int the z-direction to contact more of the width of my finger. The metal tubing for the grips and torsion springs for the shoulder levels all came from a rusted out bike at GoodWill that I bought for a couple bucks.
I had a few iterations of shoulder levers that didn't feel right. The biggest problem was finding the right shape to get a good amount of contact with my pointer fingers while also allowing for a significant range of motion. In the end, I went with a simpler straight-bar shape but that extended a little bit deeper int the z-direction to contact more of the width of my finger. The metal tubing for the grips and torsion springs for the shoulder levels all came from a rusted out bike at GoodWill that I bought for a couple bucks.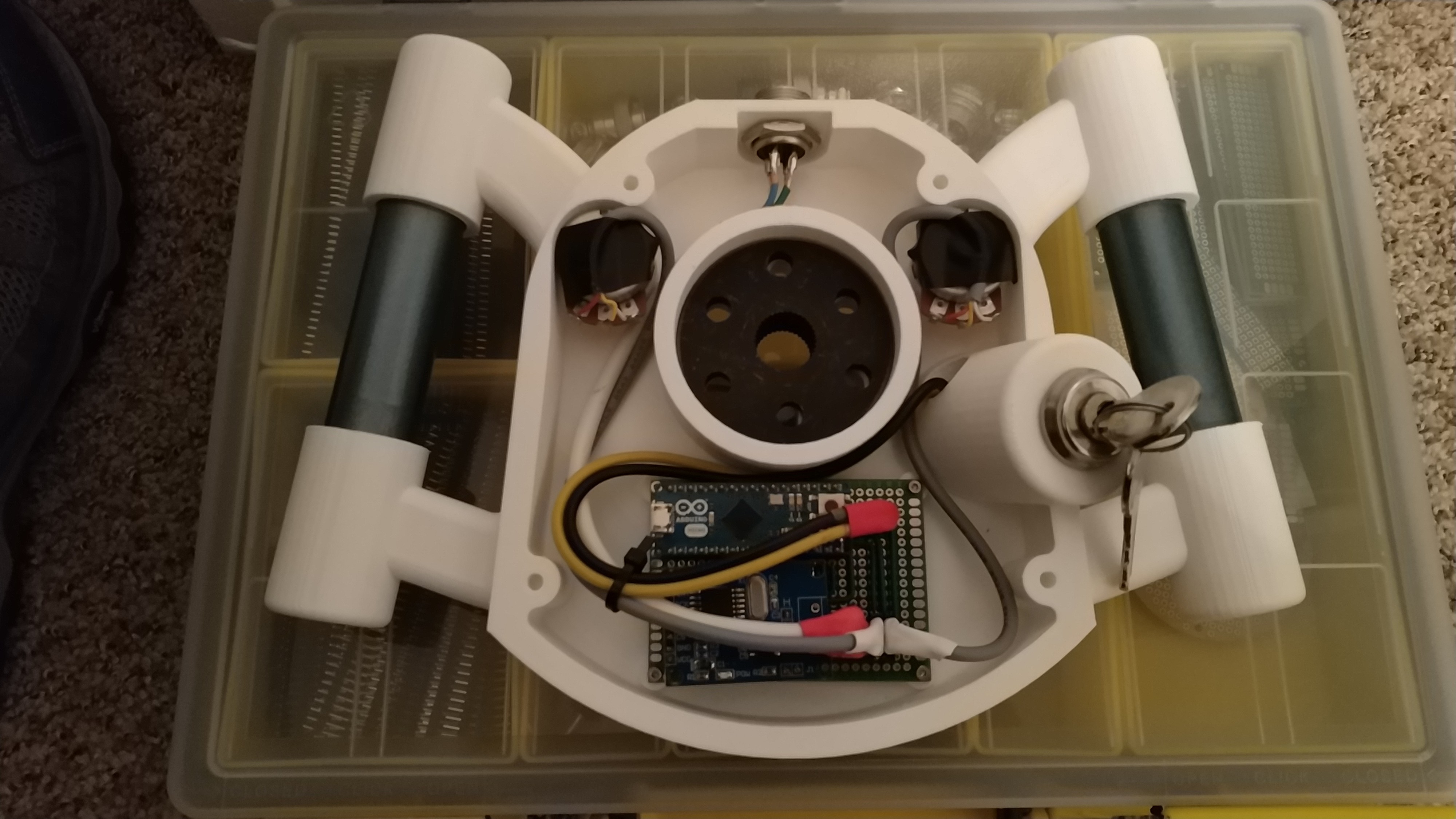










 rawe
rawe
 Jorj Bauer
Jorj Bauer
 Quinn
Quinn
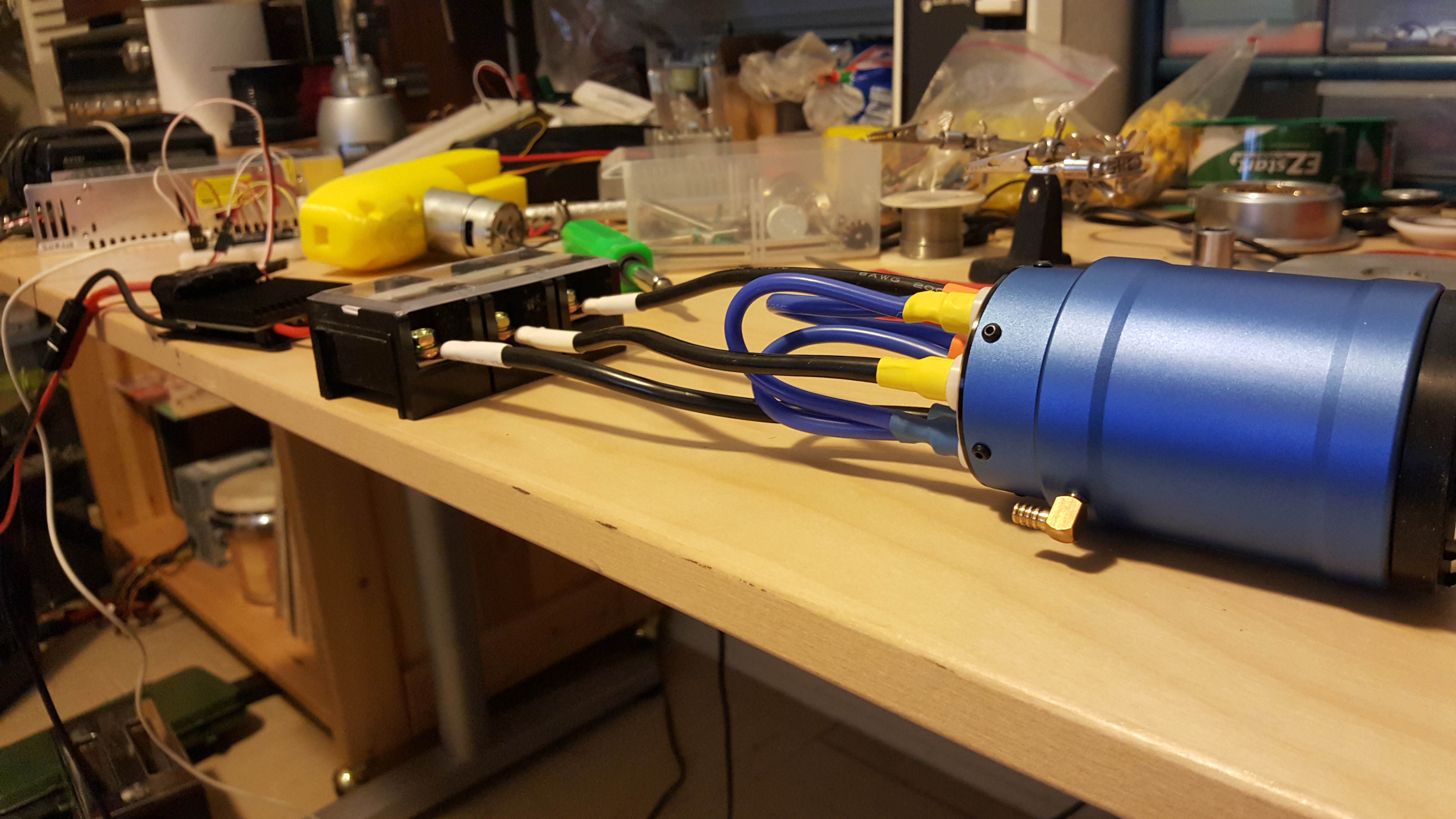
Your gearing setup greatly concerns me.
you know the AquaStar has a max speed of ~30krpm right? With that chain you are certainly exceeding the maximum linear surface speed spec by a lot.
I would recommend somthing with directly meshing gears, (like an angle grinder gearbox, Ala mini mukivan) or a belt at the very least (though you will likely still violate the max surface speed, just by Less.)
The body looks like it's coming together real good. Hope to see you at a race this next season!