 Ates Goral
Ates GoralI mainly used a mixture of the LEGO pieces that I kept from my childhood and the ones my son had accumulated through years of gifts received. Just had to order a LEGO servo motor and two additional power cables to avoid destroying the only cables we had.
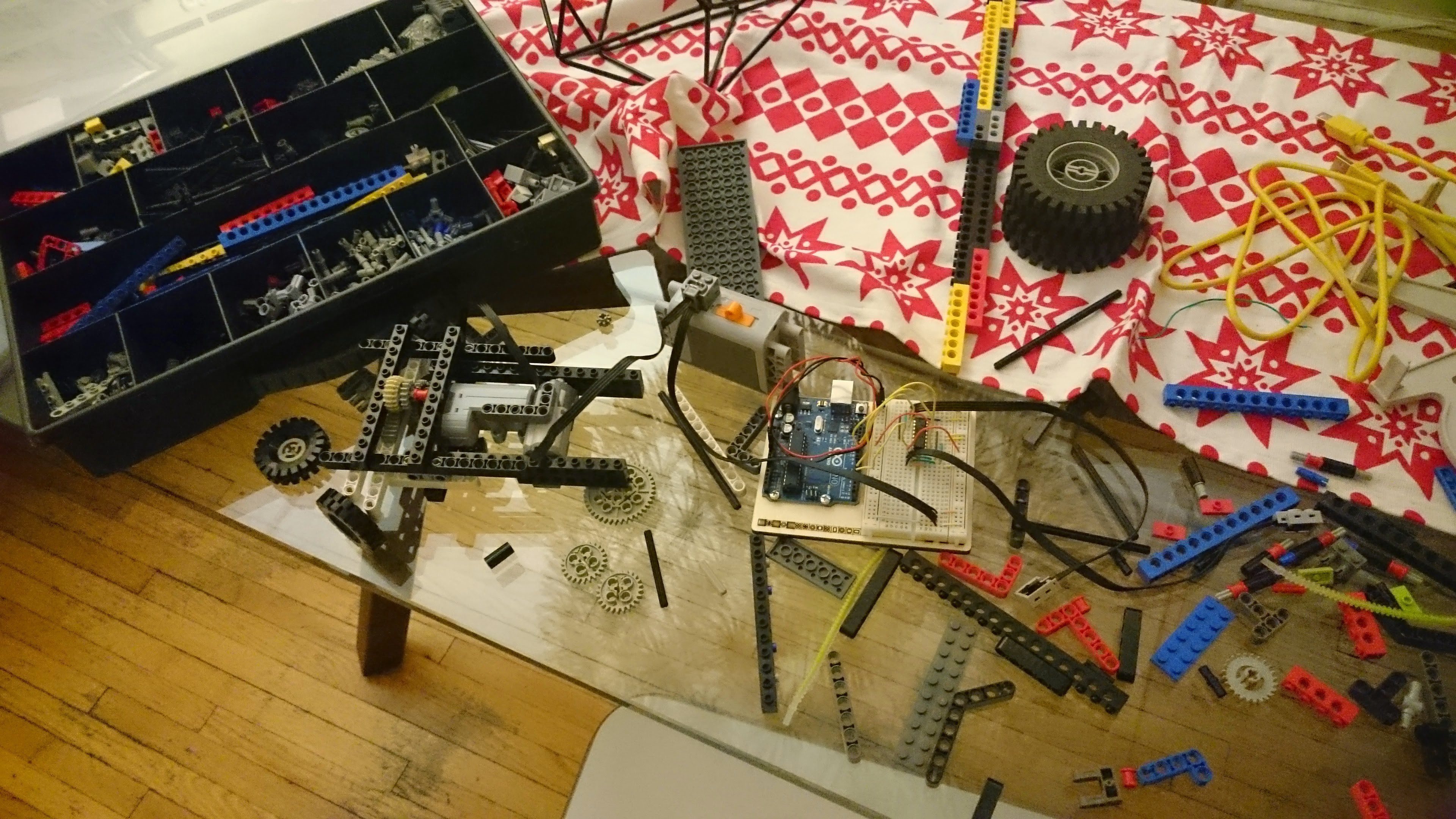
Building the drivetrain probably took the longest time in the entire project. Challenges were:
- I had a limited set of LEGO Technic pieces at hand and didn't want to bother doing a design and ordering pieces and waiting
- I had a mixture of studded Technic bricks from my childhood and modern studless ones and I had to get creative to reconcile the different connection paradigms and orientations
- I had to fit a servo and a regular motor in confined space
Ended up building the drivetrain with rack-and-pinion steering -- which in retrospect was a mistake because it gives the robot limited mobility.
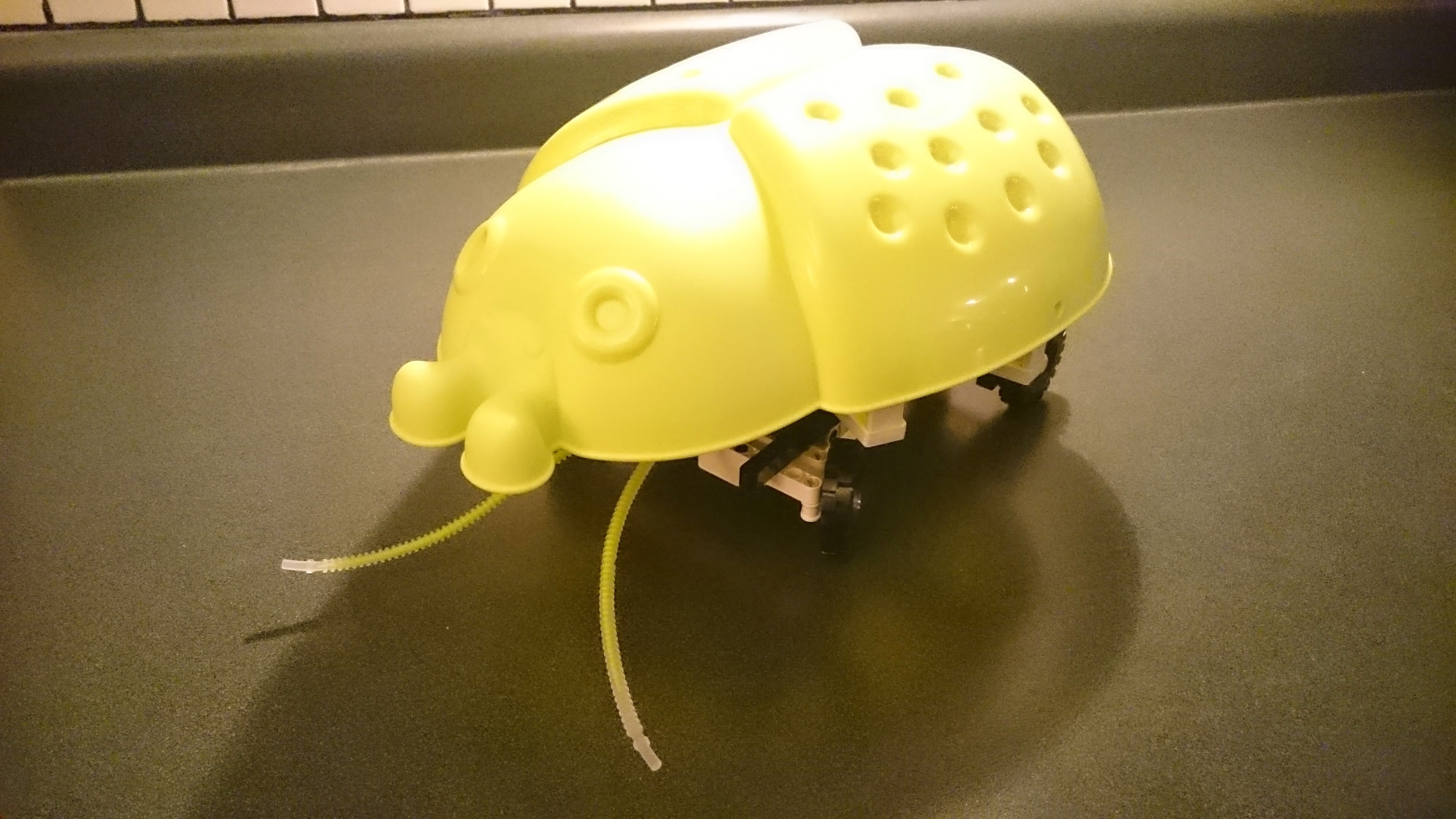
We had an IKEA SMILA ladybug children's room lamp lying around and I decided to use it as the enclosure for the circuit as well as a finishing shell. It's not a cockroach, but it's at least a six-legged relative. This is what that product looks like:

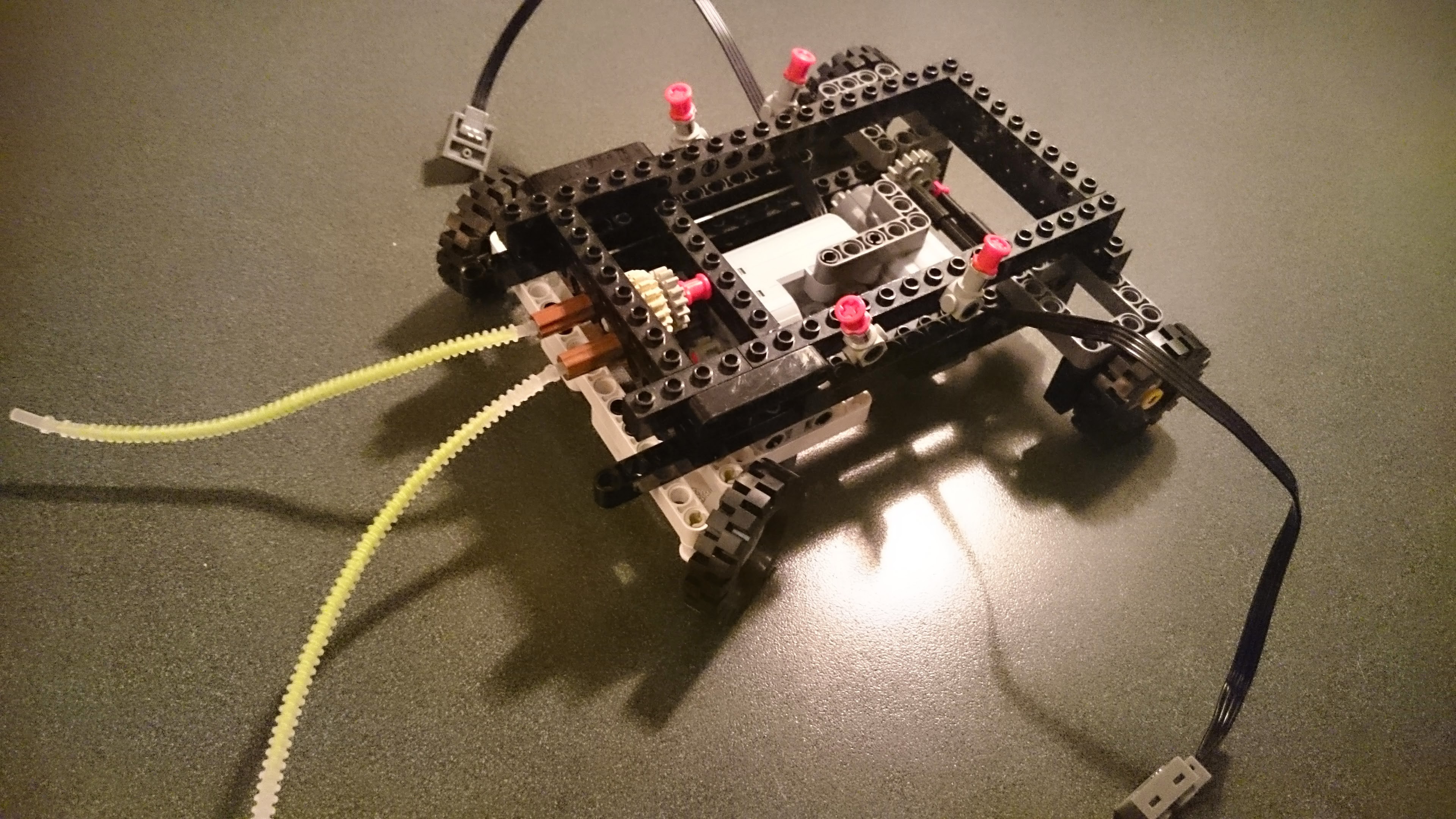
I was happy with how it came together. I kept things modular/serviceable. Here's how the robot is dismantled module by module:
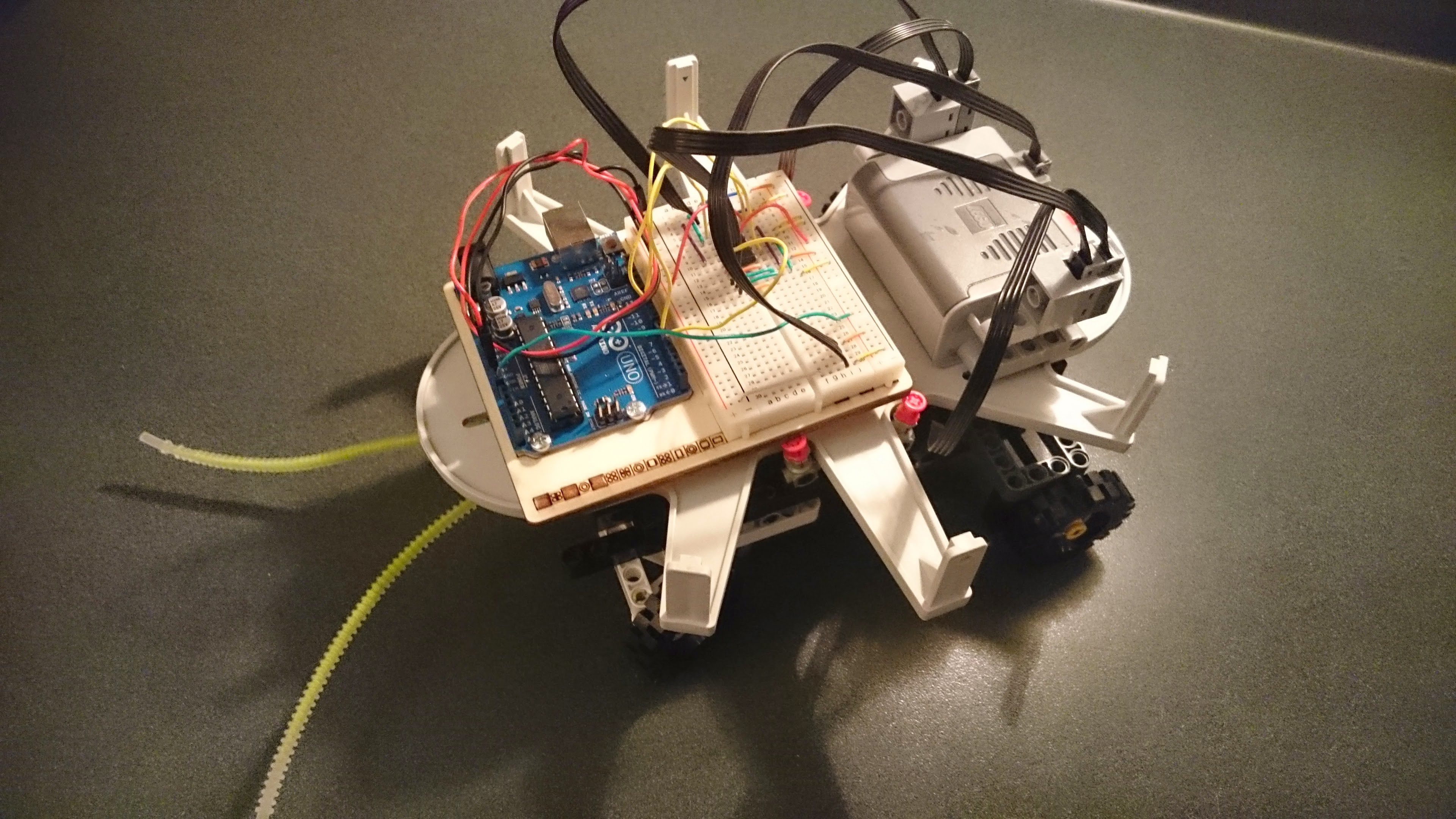
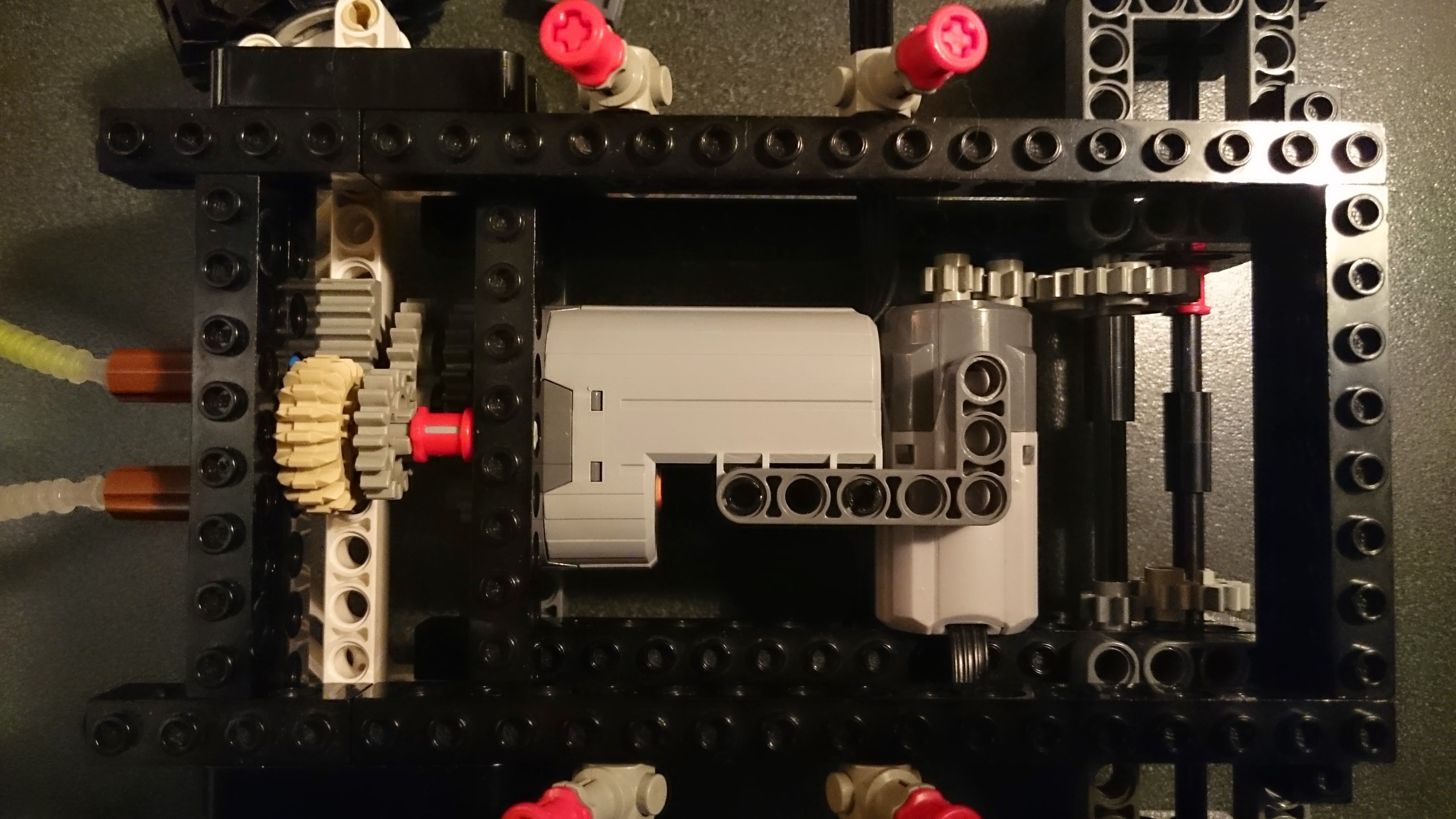
And here's a closeup of the drivetrain with two motors laid out perpendicularly:
I don't have any photos of it, but I also put two photodiodes where the eyes are.
The funny thing about this project: I'm a software programmer by profession. That's the part I should have spent the most part to make nice. I ended up spending 70% of the time playing with LEGO, 20% learning about Arduino and electronics and only the remaining 10% on coding. I got bored when I arrived at the last step of working on the code to let the robot actually, properly run away from light. Here's the entire code where the main navigation logic is:
if (maxLight < 0.05) {
// Happily in the dark. Stop where you are.
steerCenter();
stop();
} else if (absLightDelta < 0.05) {
// Not enough directional light difference to steer away, run backwards.
steerCenter();
back(1.0);
} else {
// Run towards dark.
if (lightDelta > 0) {
steerLeft(1.0);
} else {
steerRight(1.0);
}
forward(1.0);
}
Here it is in action, awkwardly and inefficiently steering away from light:
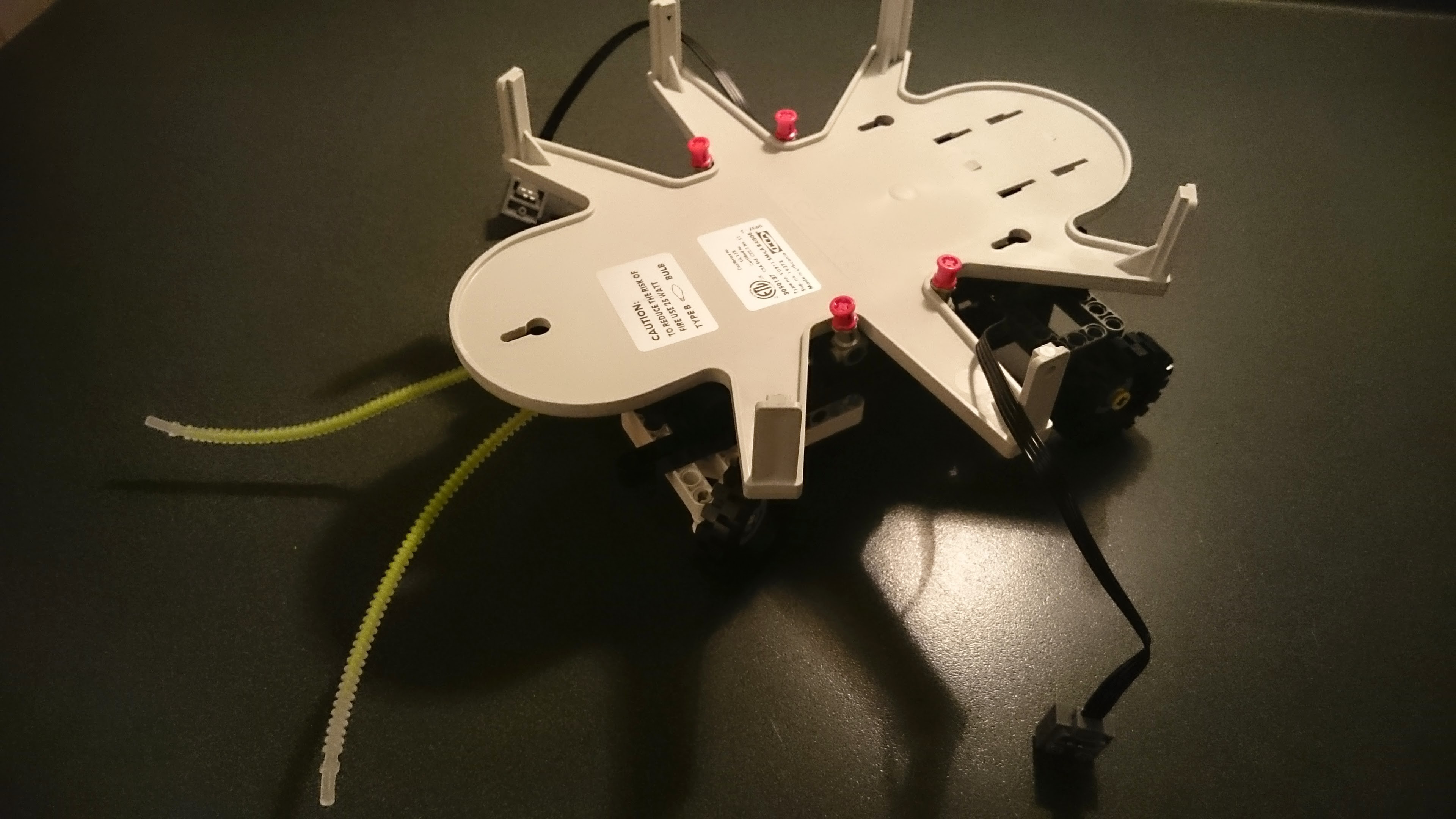
And there's the underbelly:
Soon after, I disassembled the drivetrain to return the LEGO pieces back to my son.

 [SF] Pigeon Kicker -- AkA James Ryan
[SF] Pigeon Kicker -- AkA James Ryan

 Juan Sandubete
Juan Sandubete