 Eric Wiiliam
Eric WiiliamRESQ:
I was inspired by the constant stream of search and rescue operations on the television show "North Woods Law". Each week they struggled to find lost people in the remote/rugged areas of Maine U.S.A. These areas often have no cellular service but in almost every case the target people had cellphones on them and working. As I live in Canada- we have a surplus of these situations in our vast wilderness as well. I theorized I could use an external 2.4GHz antenna to receive the beacon frames from those phones ad capture that data and locate persons of interest.
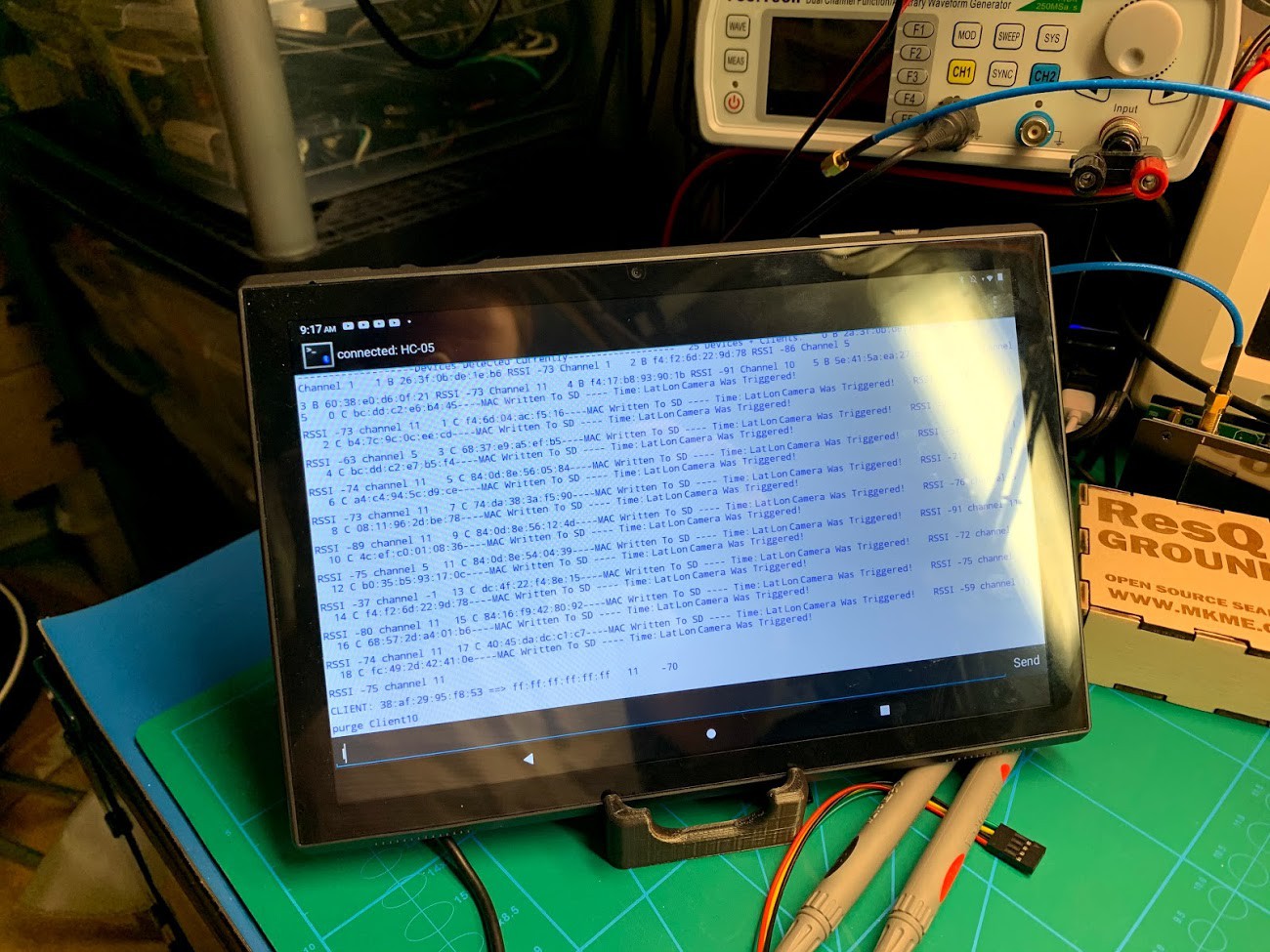
This hardware can be embedded in to any very small drone or RC aircraft. It can also be attached to existing manned aircraft already participating in the search. It can even be monitored live via Bluetooth on your phone or tablet from inside the aircraft cockpit!
Using small drone aircraft (like the Nano Talon I use here) gives all the advantages such as flight condition tolerance, height, terrain, time of day etc that drones have over manned aircraft. They can also be sent on the full way-point mission without human intervention and tracked live from any ground station.

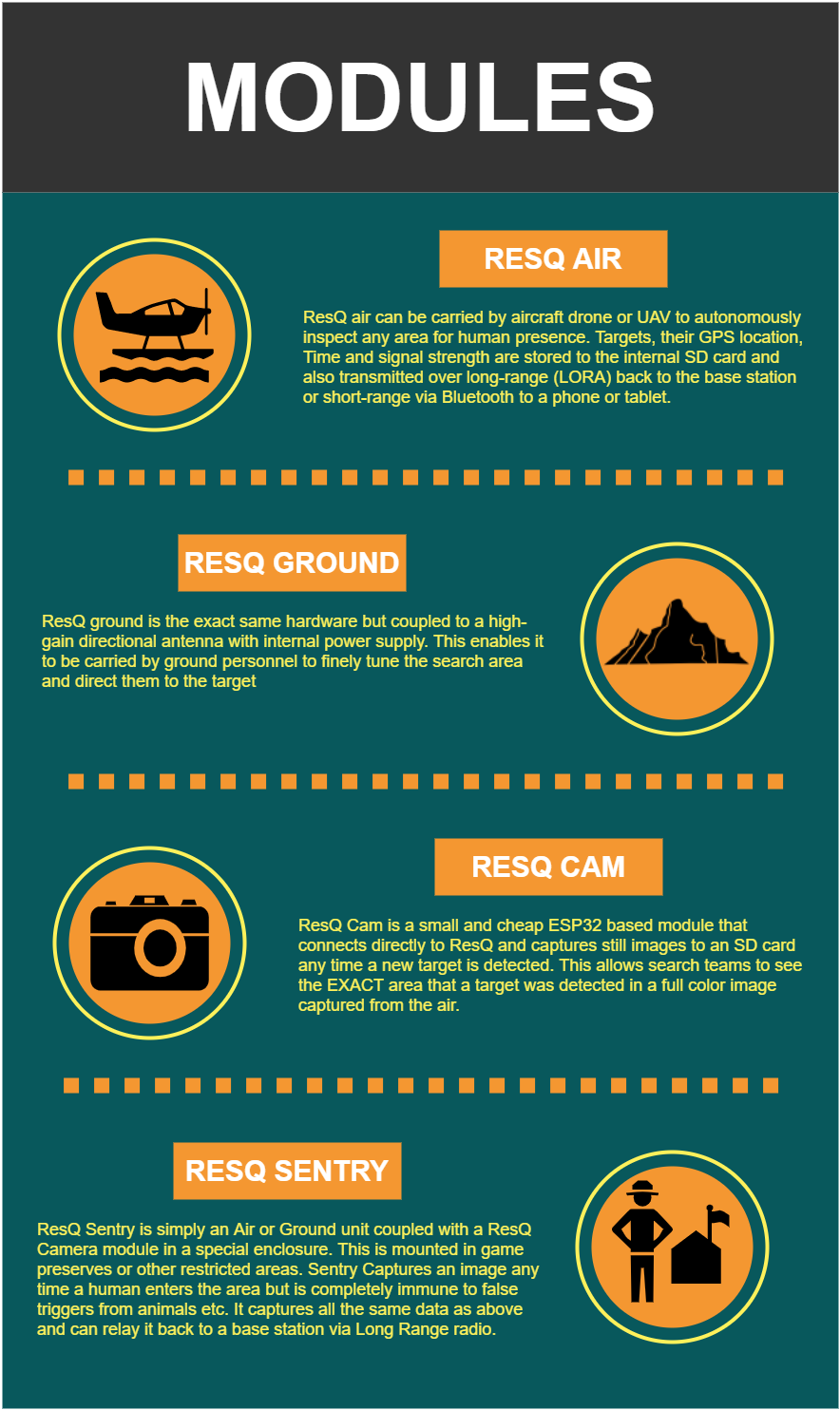
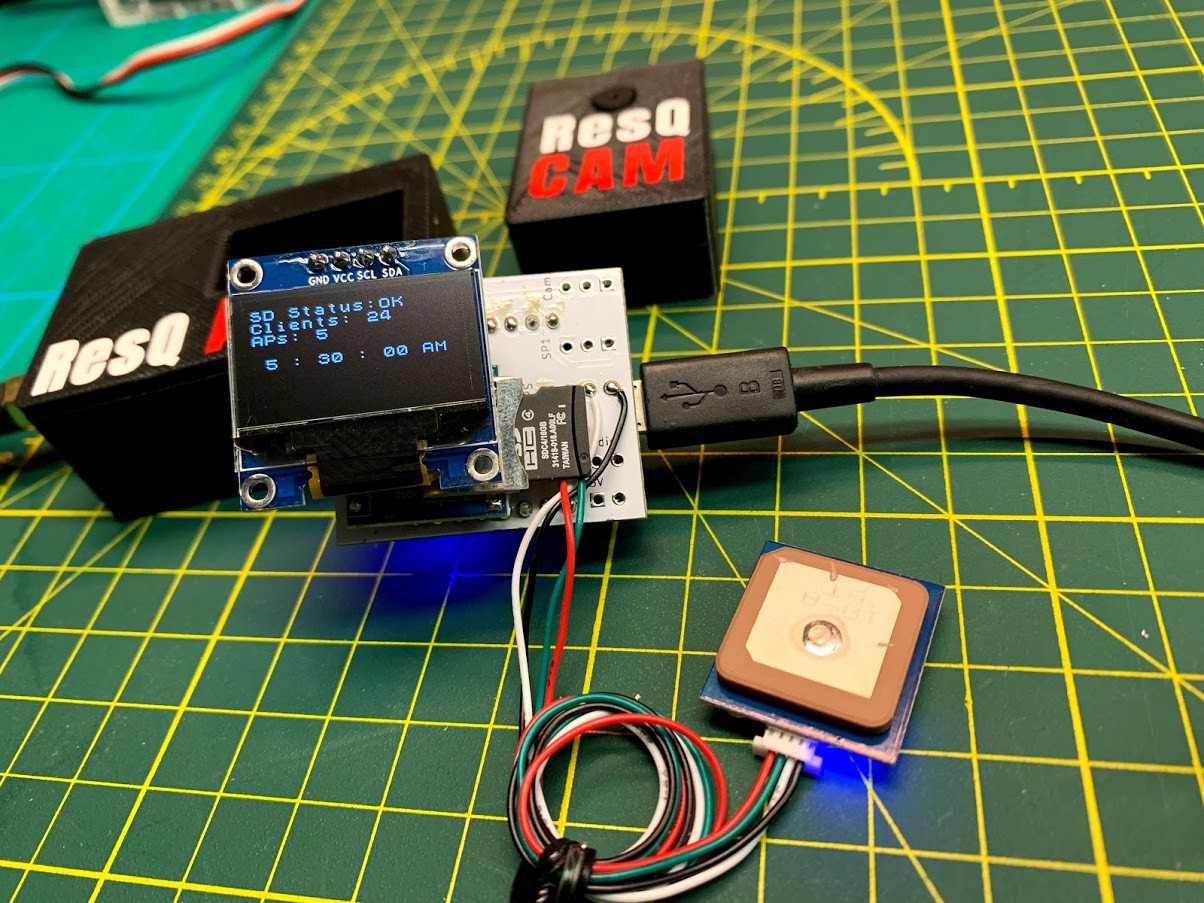
What ResQ does:
- Detects all Beacons, their RSSI and their MAC addresses
- Detects All Access Points (APs) in range -not needed but I log them anyhow
- Gets GPS Lat/Long position
- Gets GPS UTC Time
- Logs all the above to the SD card .csv file every time any new target is detected
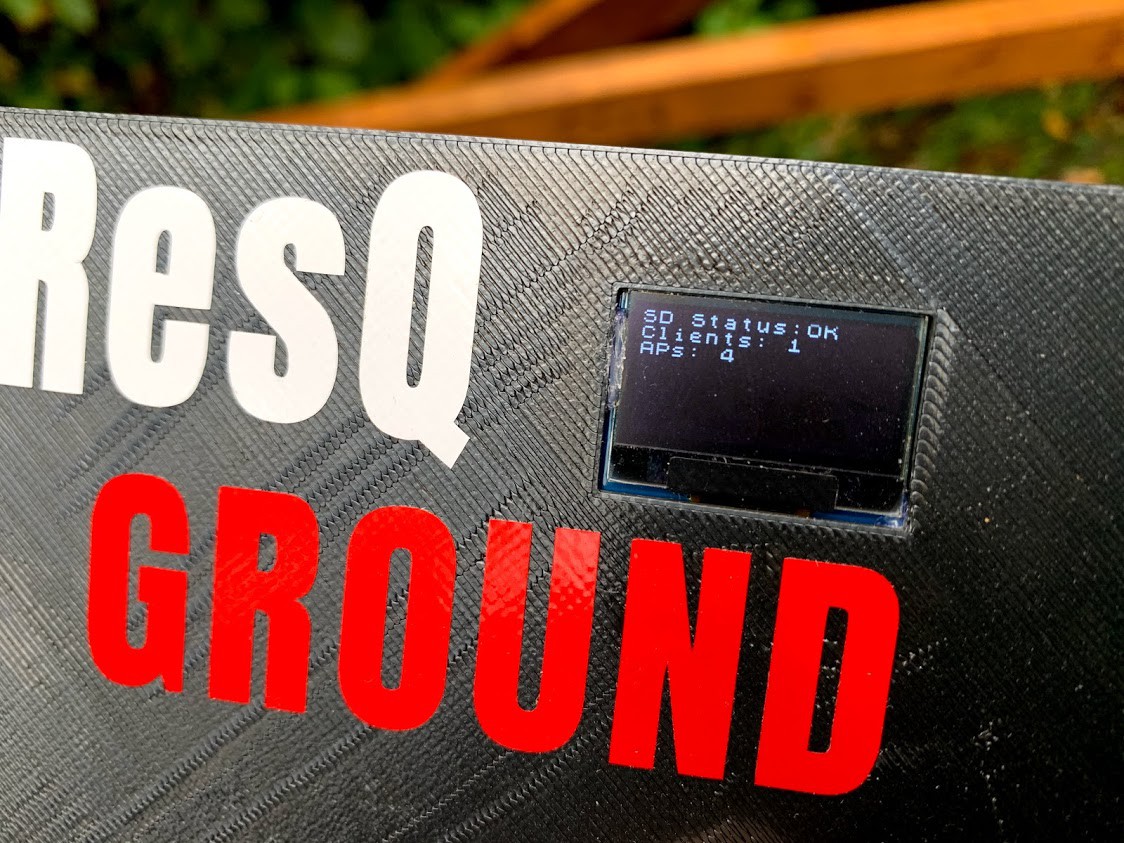
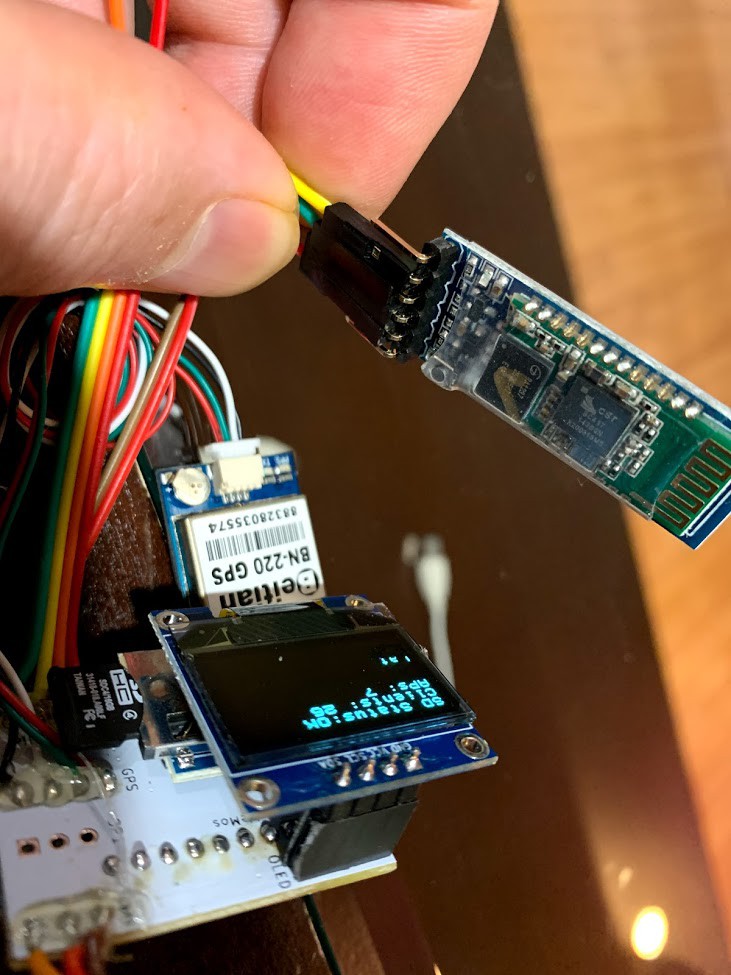
- Displays the number of clients detected, APs detected, time and Lat/Long on the OLED screen live.
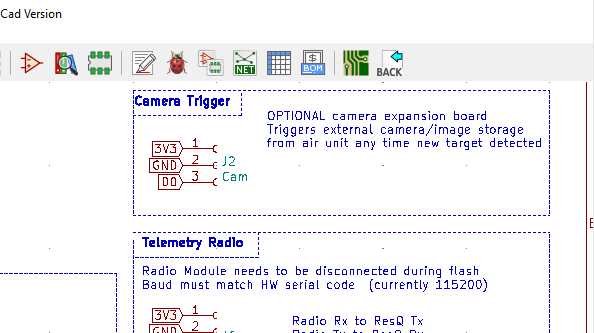
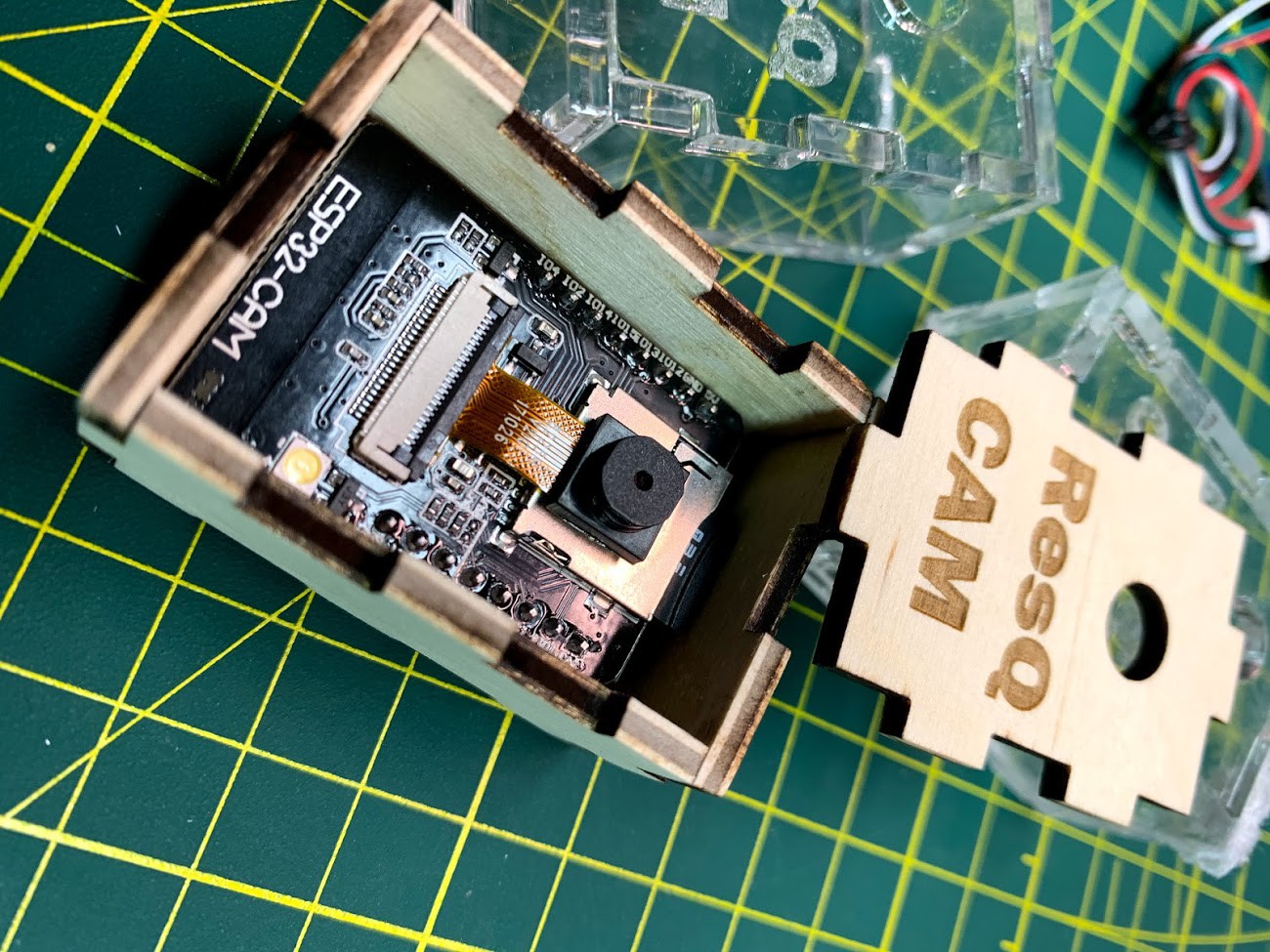
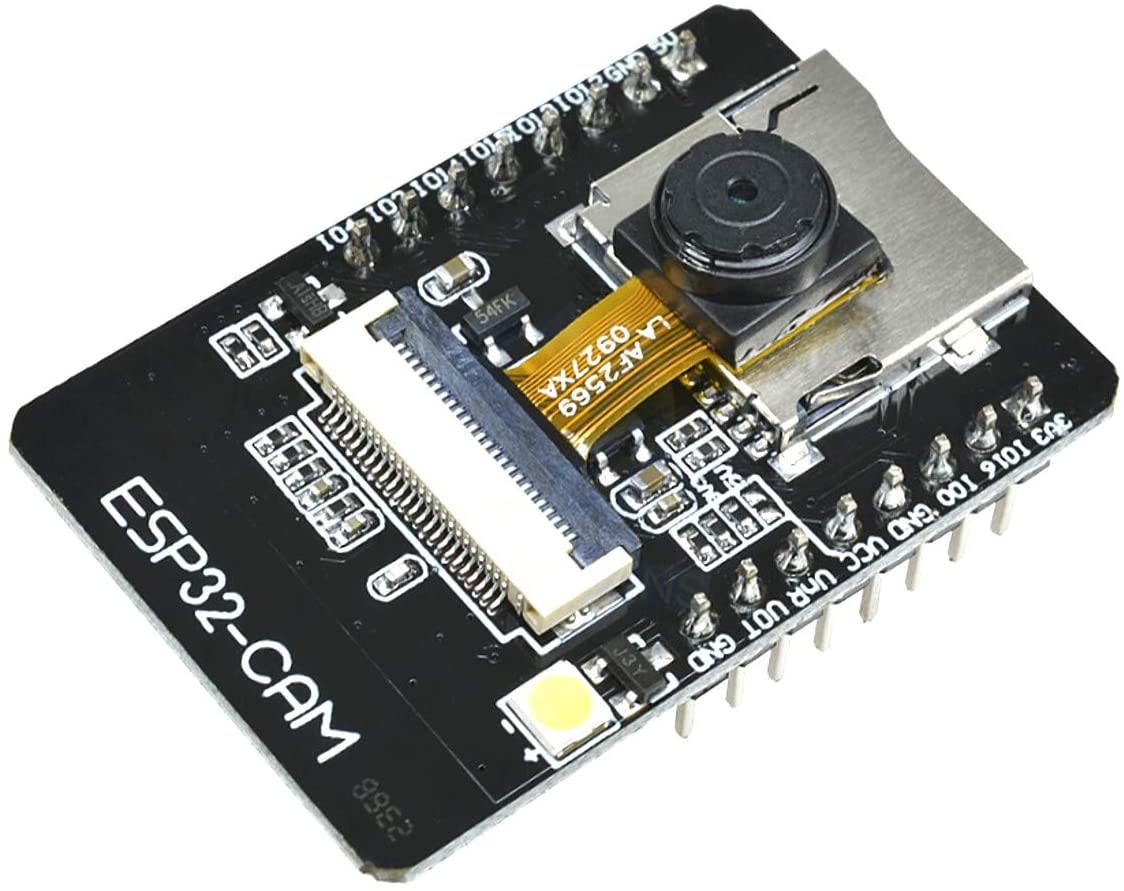
- Triggers the camera module to capture an image of the area (optional)
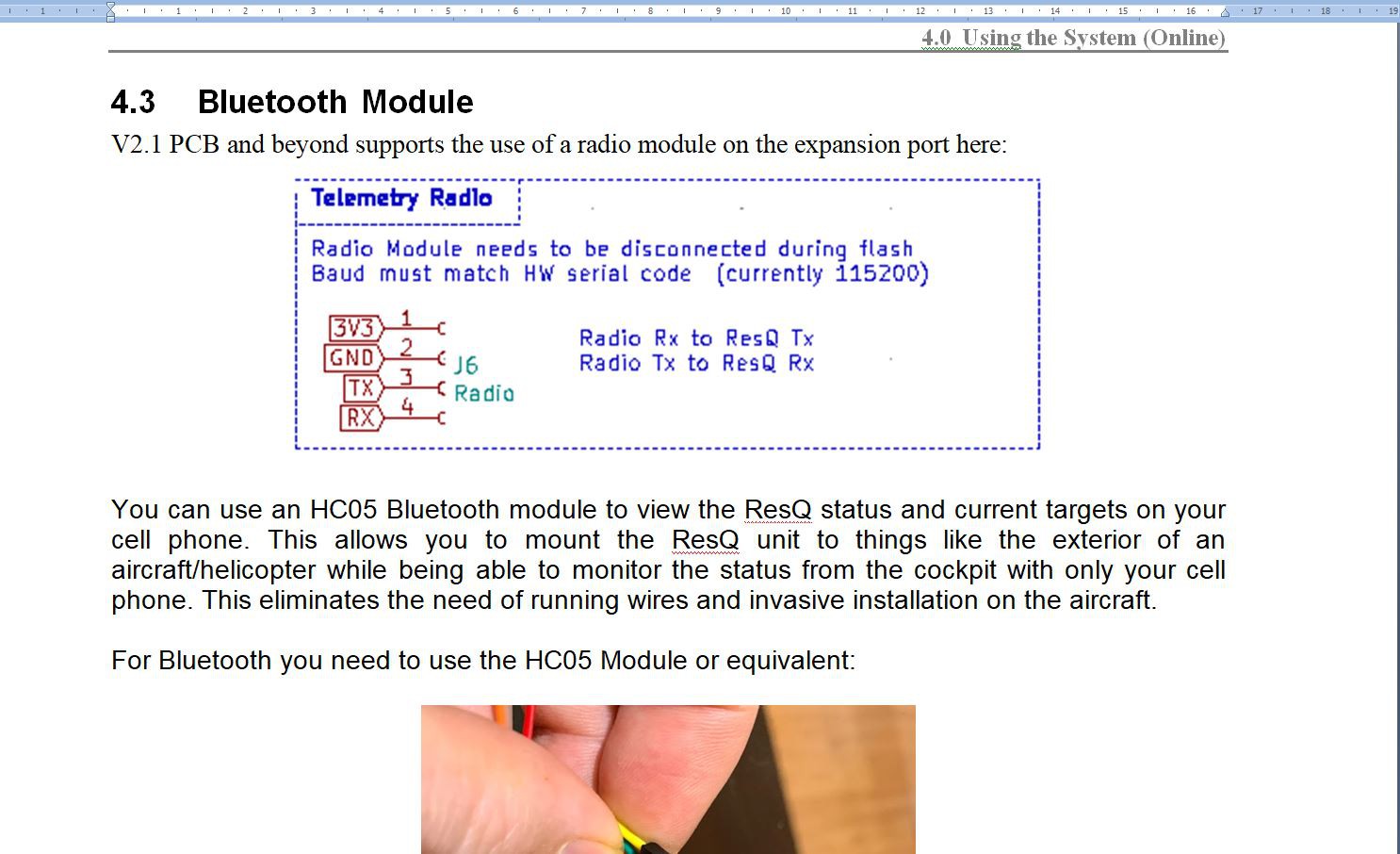
- Sends the target info to your phone/tablet over Bluetooth (optional)
- Sends data to remote monitoring station via LORA (under final dev currently)
COMMERCIAL OPTIONS

I have only found this one unit which does a similar task but is handheld only, limited to ~150 feet range and retails for $2400 USD. Our ResQ project has similar functionality (using 2.4 GHz) for only a small fraction of this cost. Our air unit is also easily deployed by aircraft or drone. Nice.
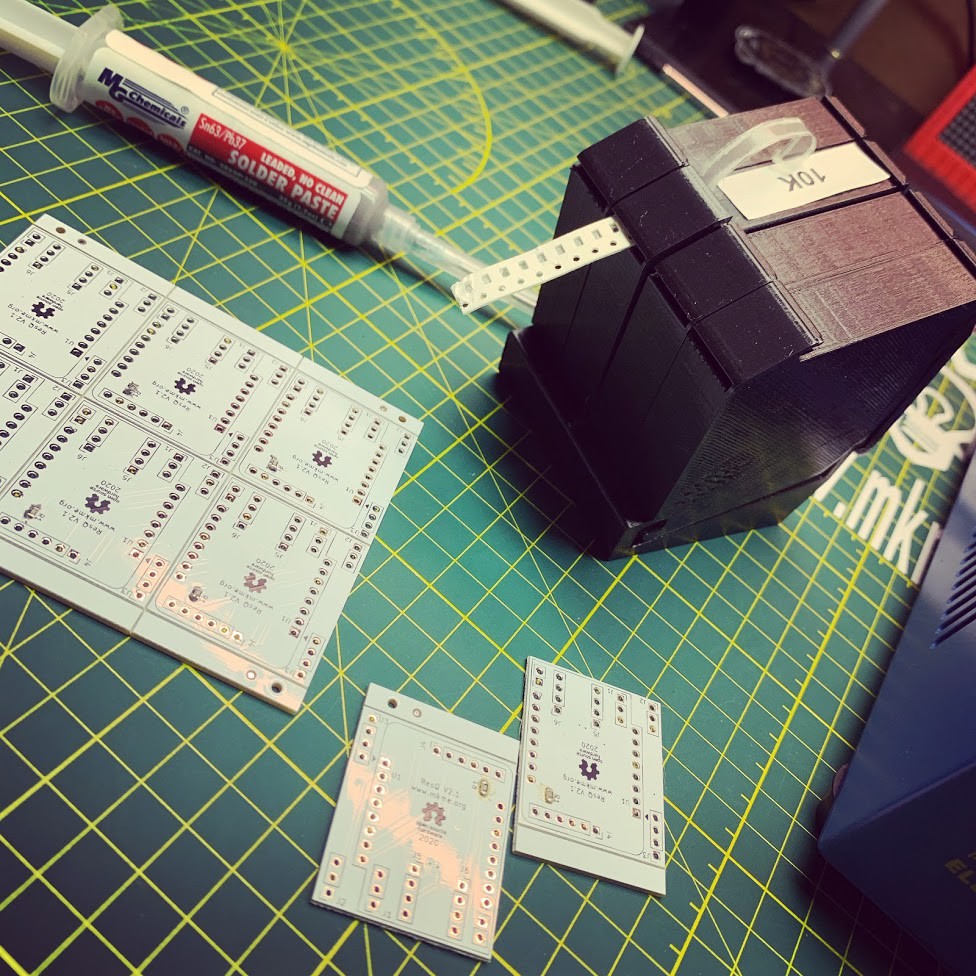
BUILD
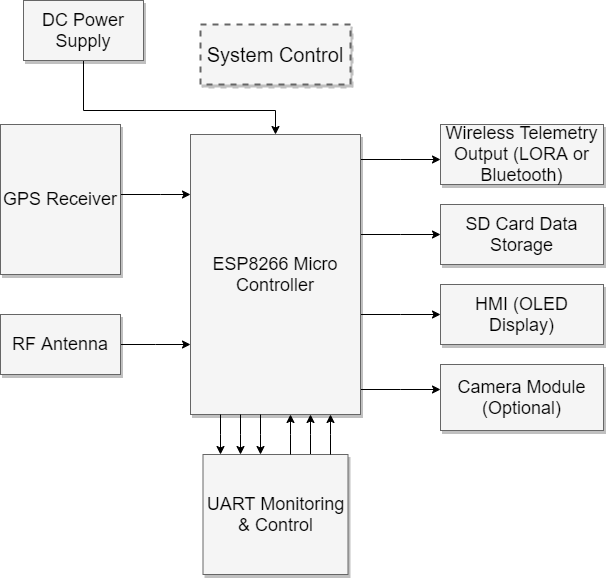
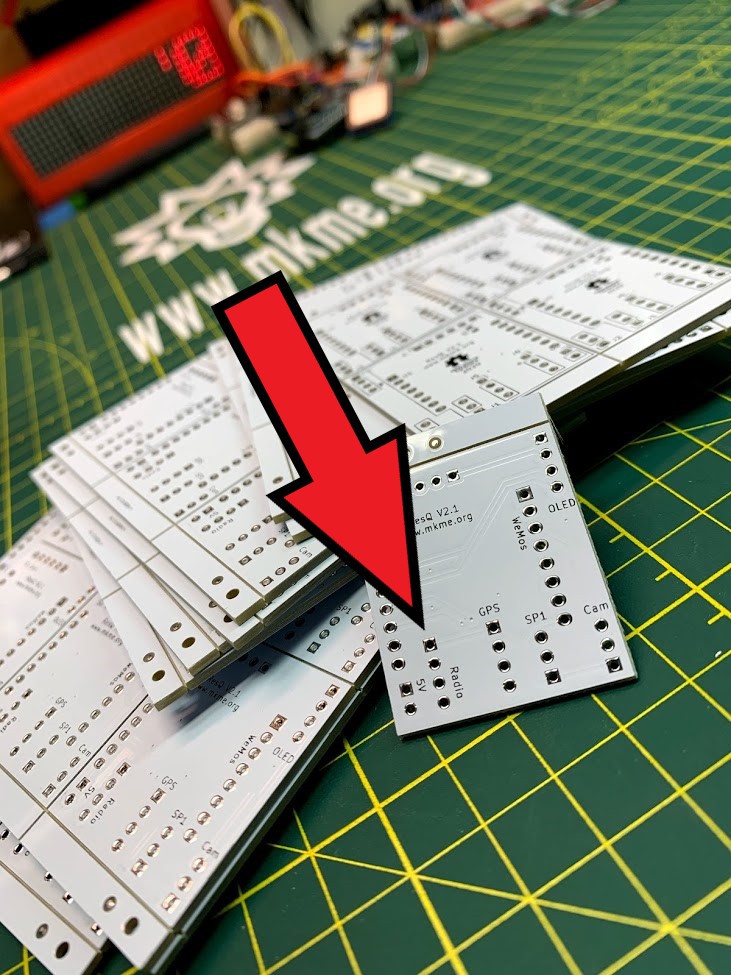
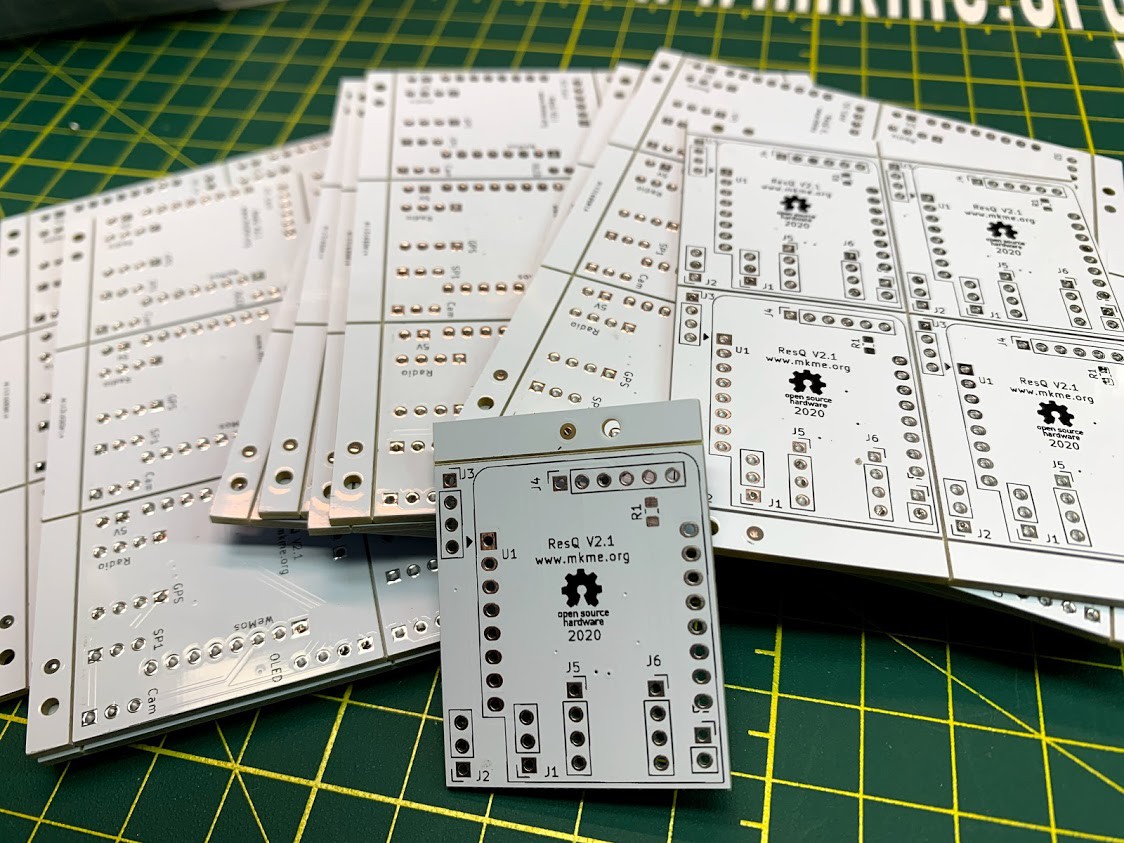
The air and ground units both use exactly the same hardware/PCB with the only difference being the power supply on the ground (battery) and larger directional antenna on the ground unit. This keeps the instructions, assembly and BOM very simple. All the parts (except YAGI) are currently even stocked in my local Amazon warehouse here in Canada - Handy!
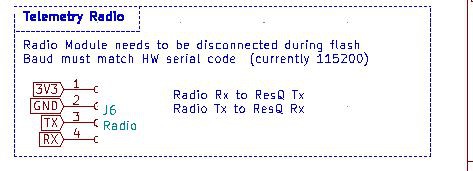
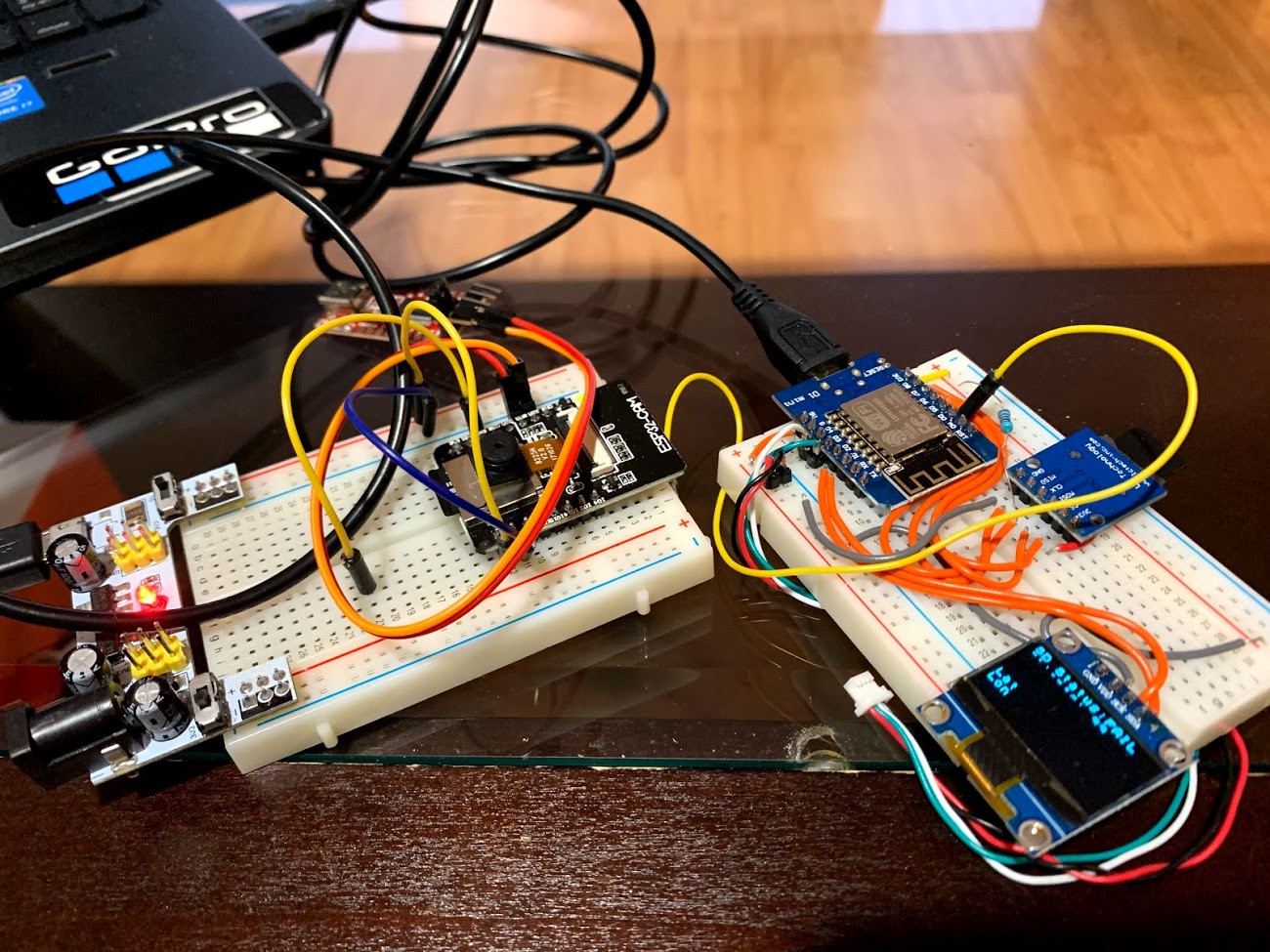
I am using the Wemos D1 mini PRO ESP8266 (for both air and ground units) with an external antenna (YAGI or omni/dipole) to receive the beacon frames, log them to SD Card with the MAC address and GPS coordinates to easily plot with Google Earth/maps. It can also transmit the live data telemetry via LORA or similar module to the ground instantly as well by sending the debug UART via radio to a simple USB interfaced ground station.
The electronics are simple enough that anyone with basic soldering skills can assemble their own ResQ from scratch or kit in under an hour.
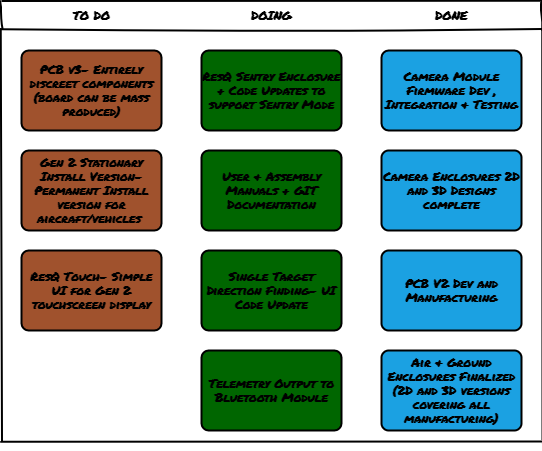
V3 of the PCB/project will be entirely discreet components and open the door to possibly producing these units at scale for a lower price and MUCH smaller package.
MEDIA
Contest Entry Overview Video:
Build Part:1
Build Part 2:
Build Part 3:
Part 4:
See YT playlist for existing tutorials in the links (I documented most facets of the build in standalone related videos which when all combines- make this project) Handy eh
Skills Learned
Here's a fun little summary of the things I think this project has directly taught me or drastically improved by doing it. Maybe it might be of interest to you to learn them too if you make this project!
- PCB/Design in Fritzing- I could do a bit but now its much easier (no longer needed- see below)
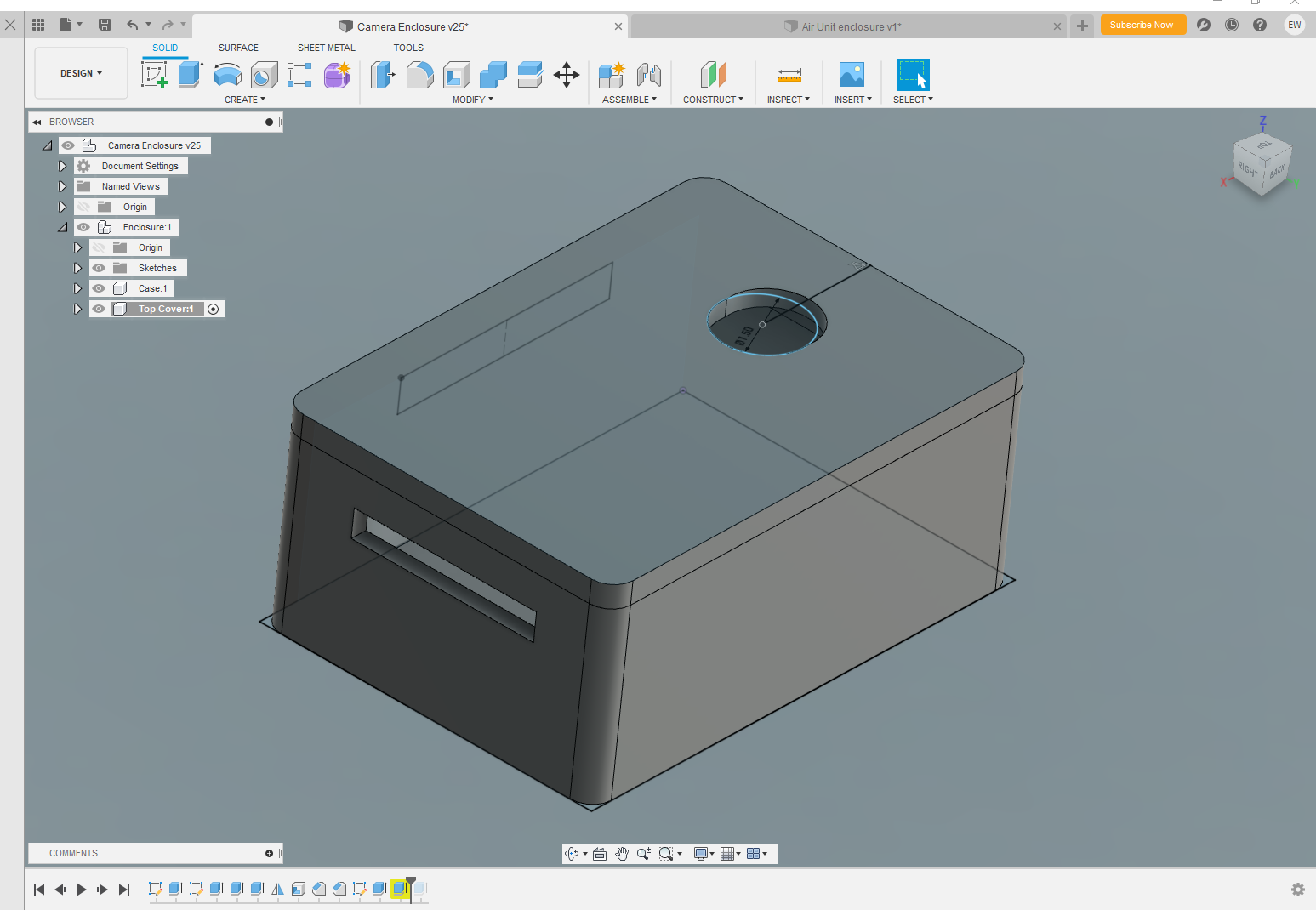
- OpenSCAD- Had never used it before this project. Now it makes total sense (premade items not coding from scratch) and makes customizable...






















 Chaz
Chaz
 Jakob Kilian
Jakob Kilian
 Non-ICE
Non-ICE
 Xasin
Xasin
we have 99% cell network coverage in our country. how it will work here? maybe directional antenna can be used?