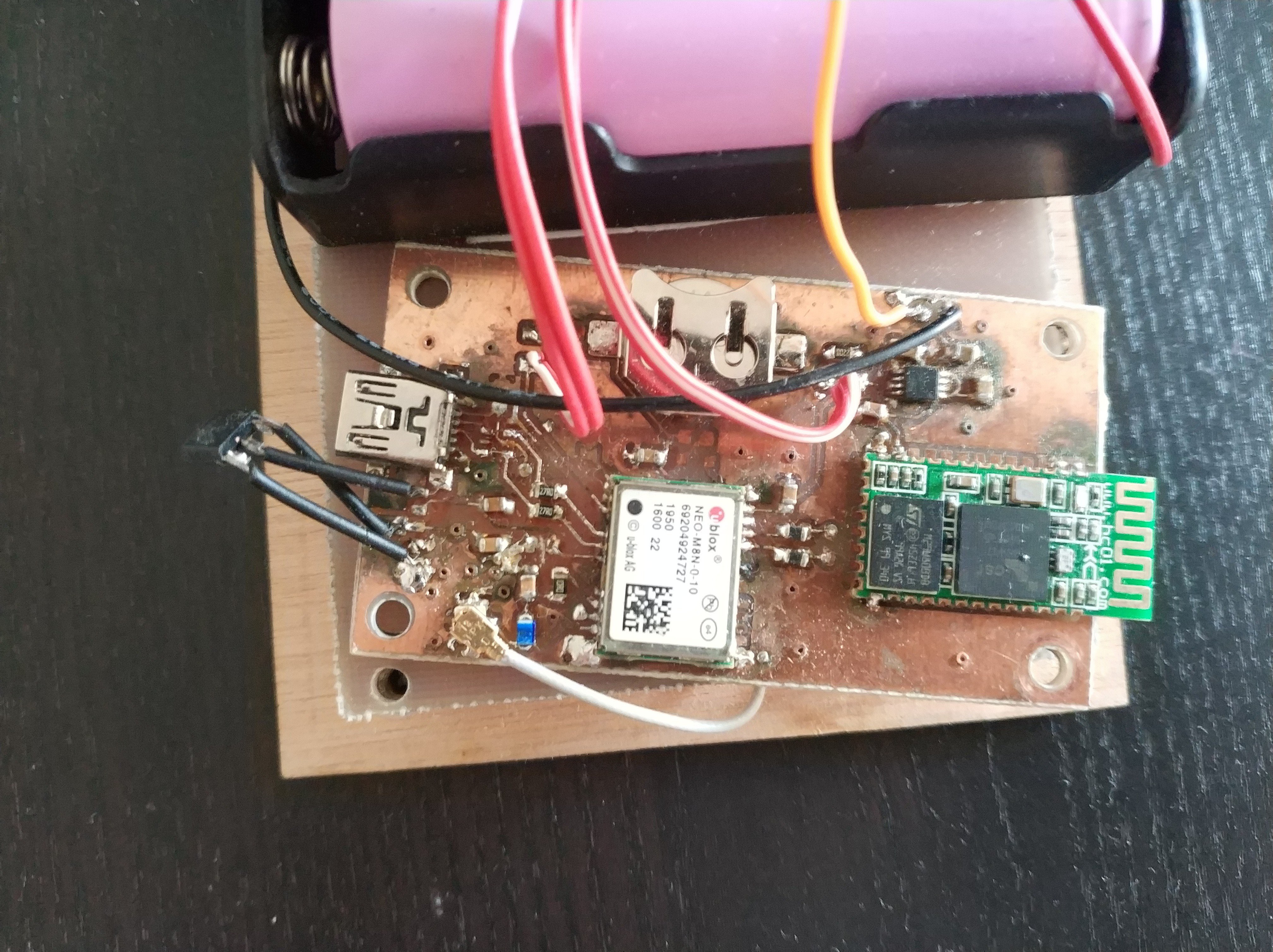
Key features
- GPS, Glonass, Galileo, Baidou support
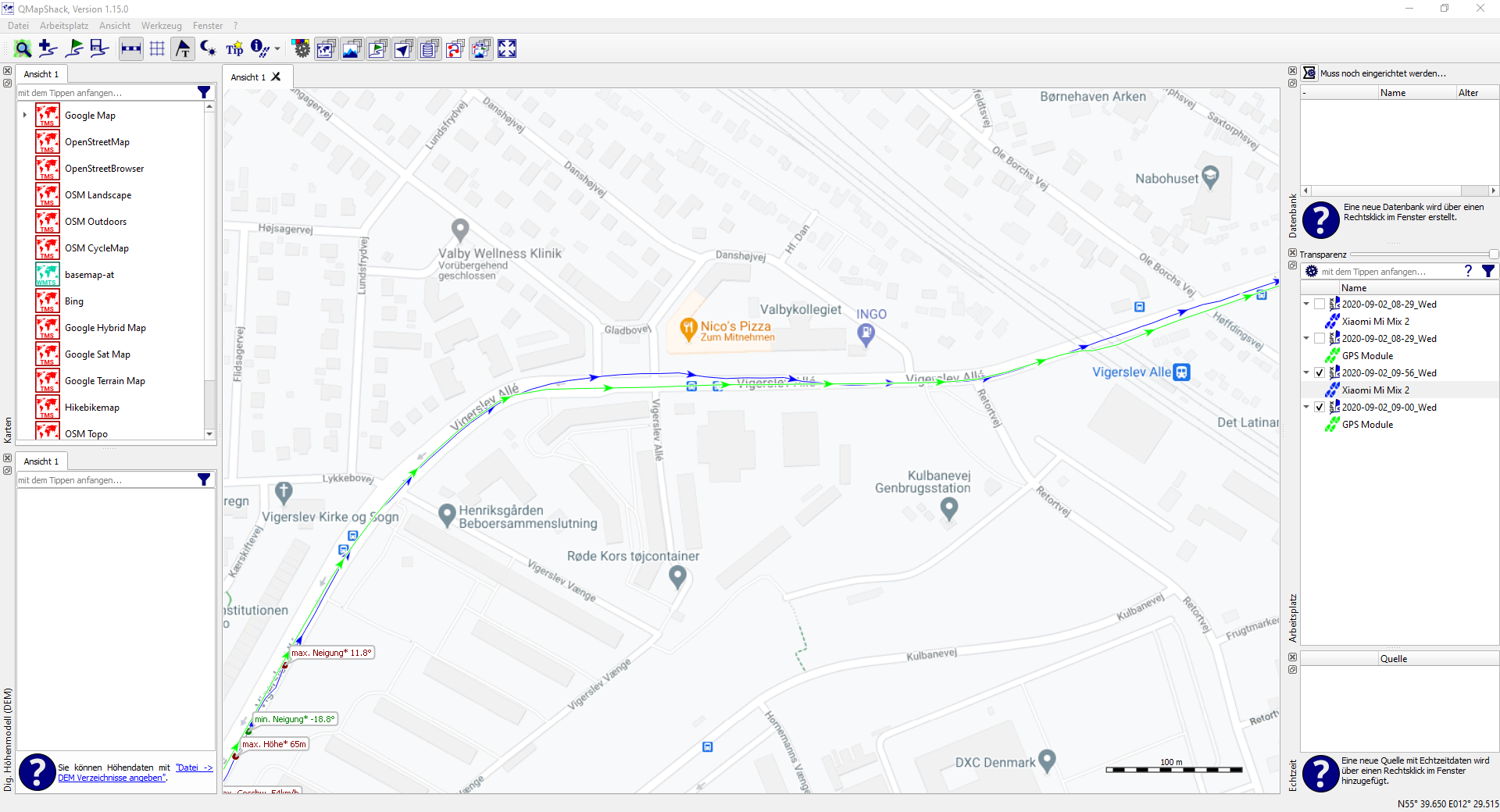
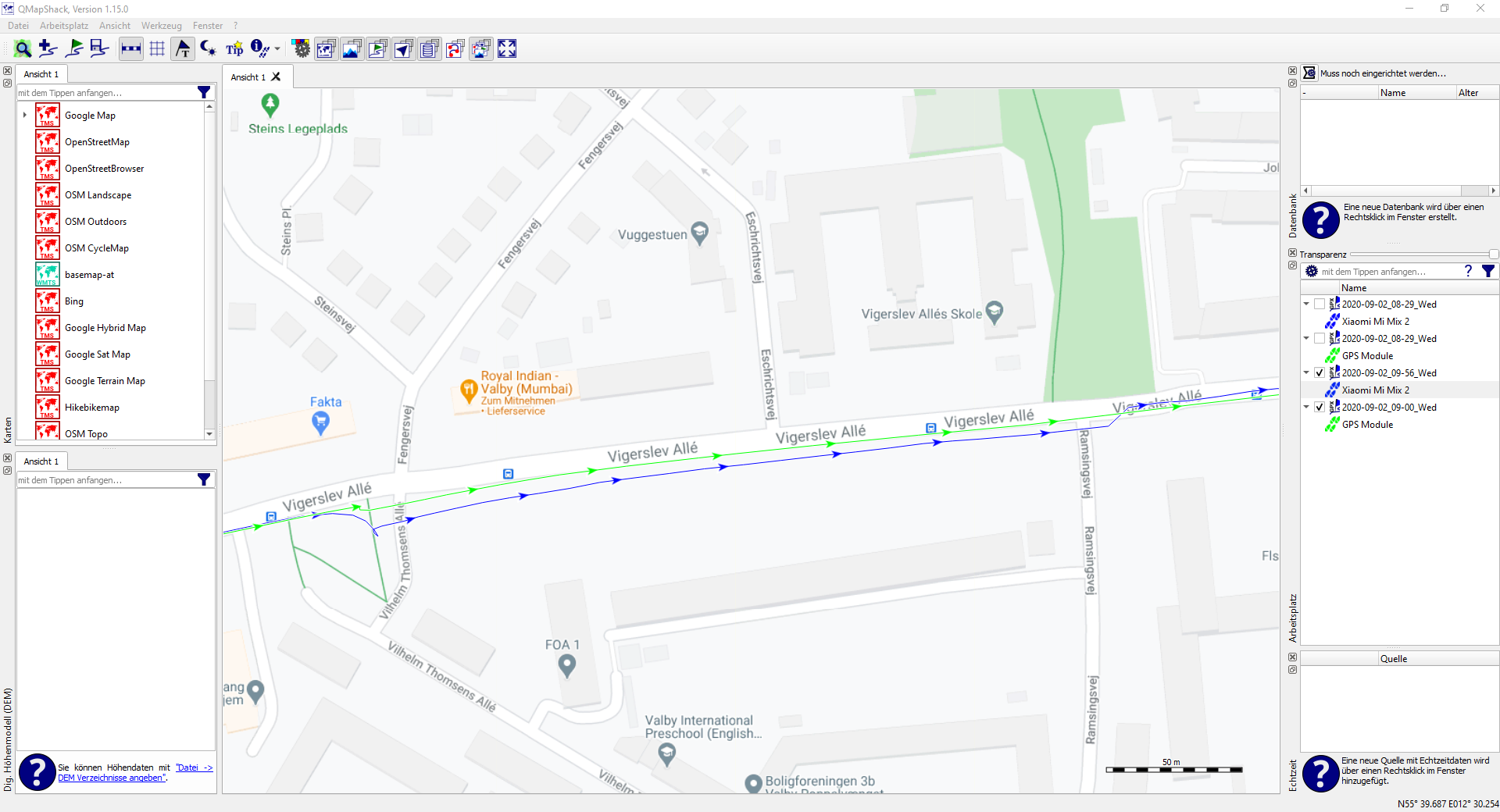
- 2.5 m accuracy according to datasheet
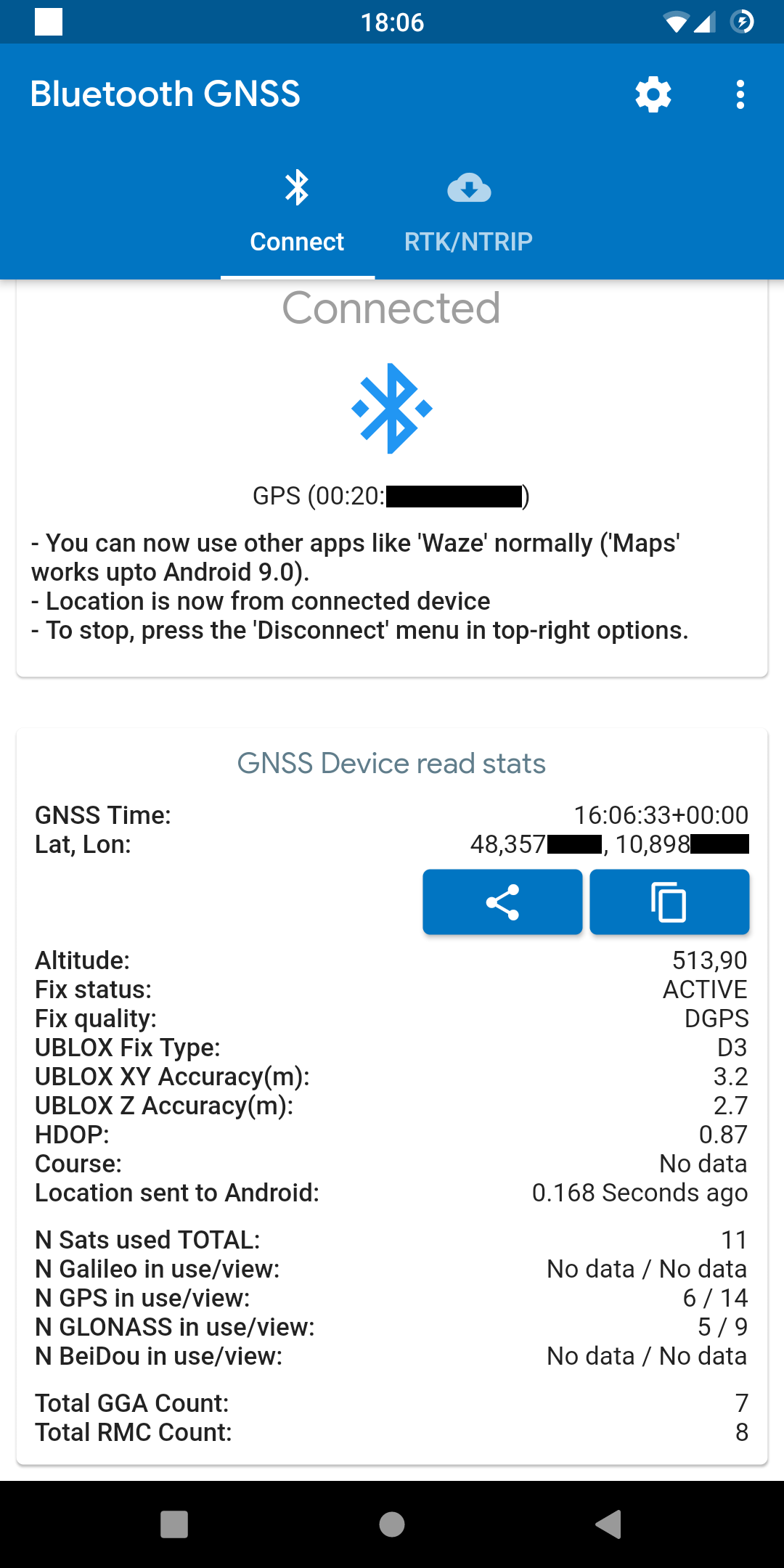
- Connects old Android devices to a position service
- Low energy consumption
- Over 27.5 h continous run time with one 18650 (tested while hiking)
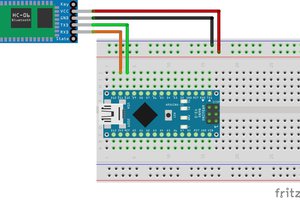
- USB-port for u-center programming and as USB-GPS device
- GPS, Glonass and Galileo configured




 Silícios Lab
Silícios Lab
 Pattern Agents
Pattern Agents

 Ruslan
Ruslan