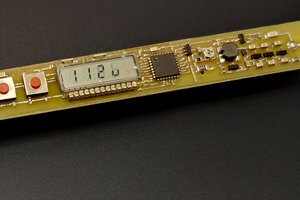
I wanted to learn more about supercapacitor charging. I had made a few boards using purpose-built ICs, but wanted to make it up of simple blocks that I could tweak and test. Also, I blew up a few of the purpose-built ICs, and wanted to slow the whole thing down.
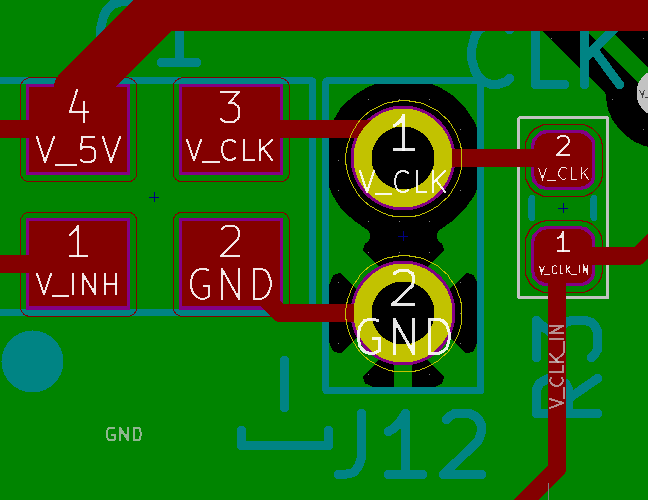
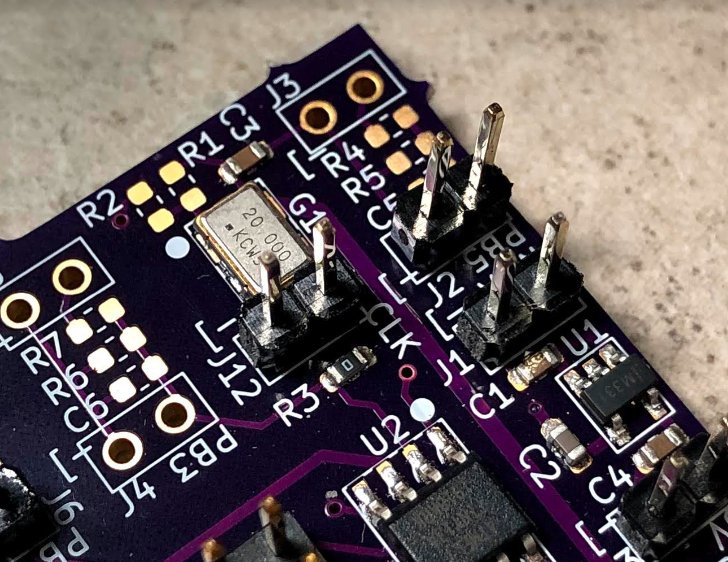
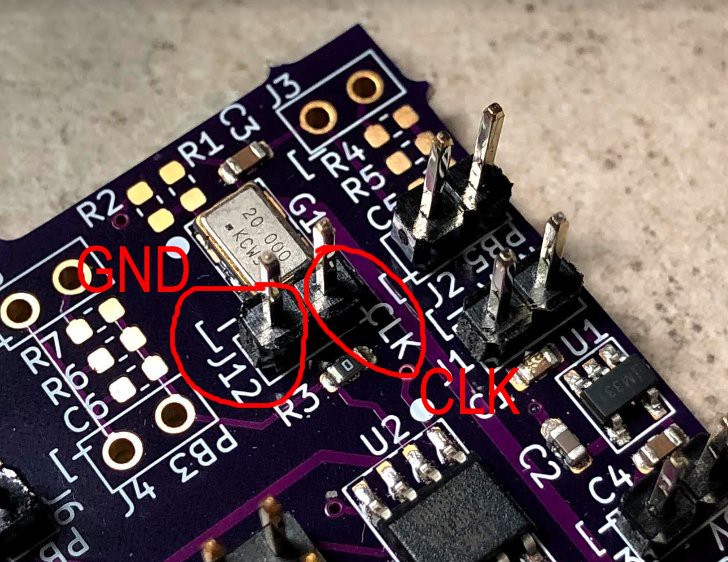
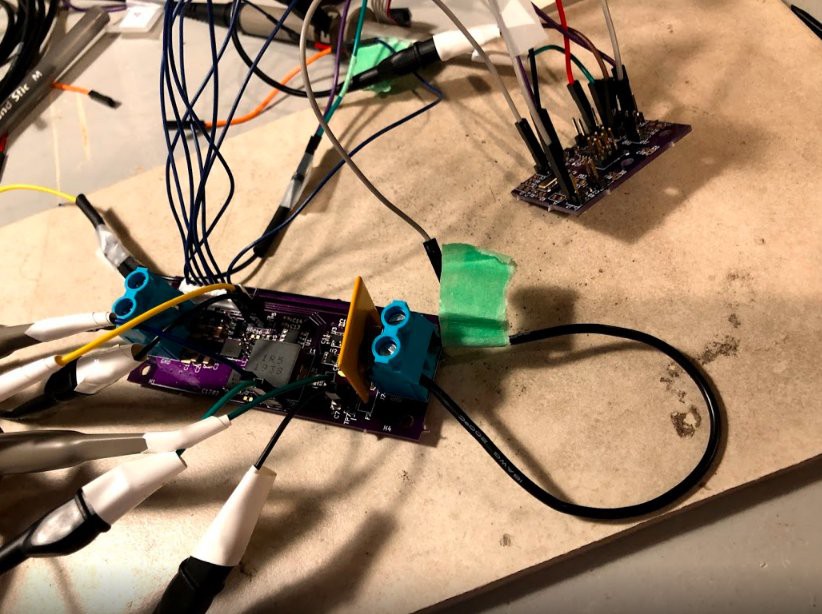
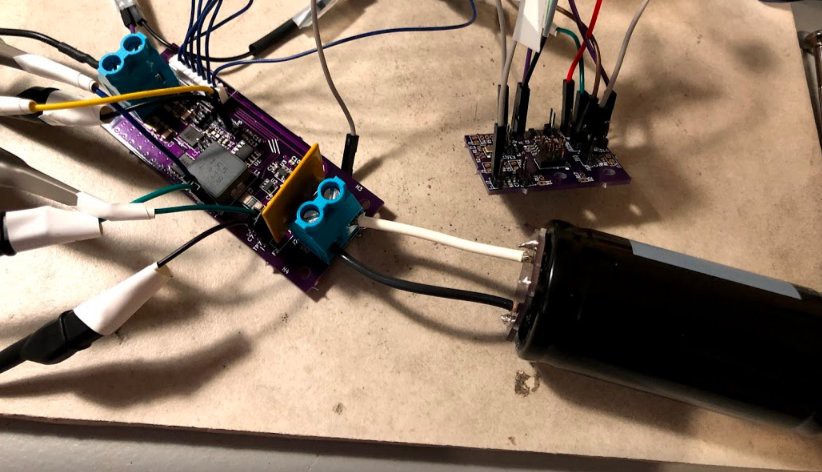
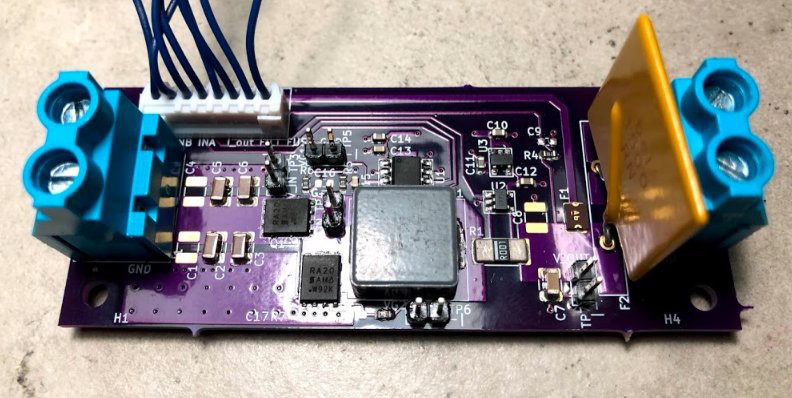
First, I designed an ATtiny13A eval board with a 20 MHz external clock. Then, I designed a "testbed" with the basic parts - input capacitor, half-bridge, inductor, and output current sensor.
I learned a lot, so let me share!
I placed the steps in the project logs. Cheers!





 BleakyTex
BleakyTex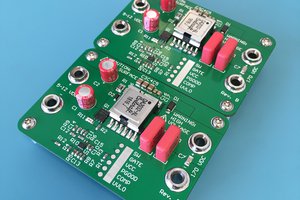
 James Wilson
James Wilson
 Caleb W.
Caleb W.
I added a 25 A supercapacitor charger project...
https://hackaday.io/project/175638-25-a-supercapacitor-charger