0%
0%
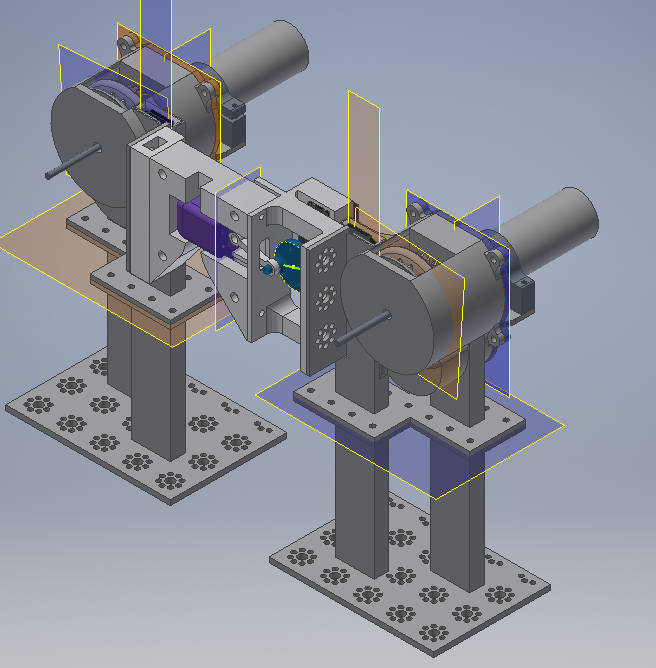
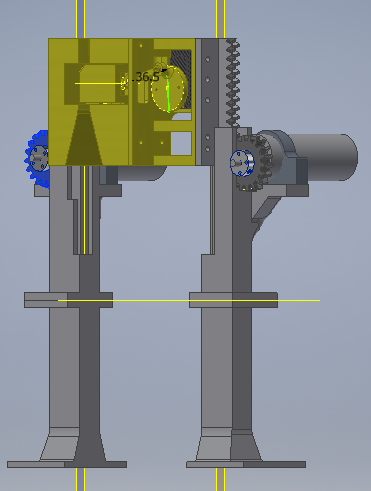
Lift and Lock Mechanism | FTC Robot (2018-2019)
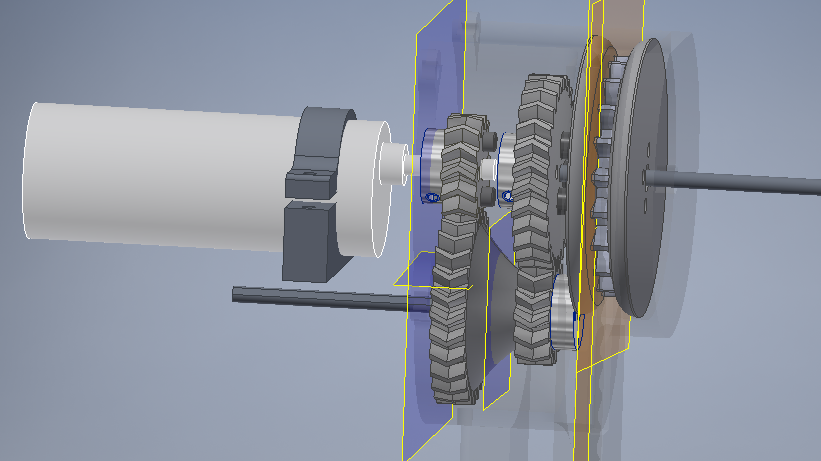
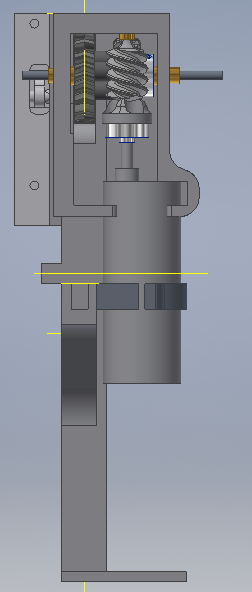
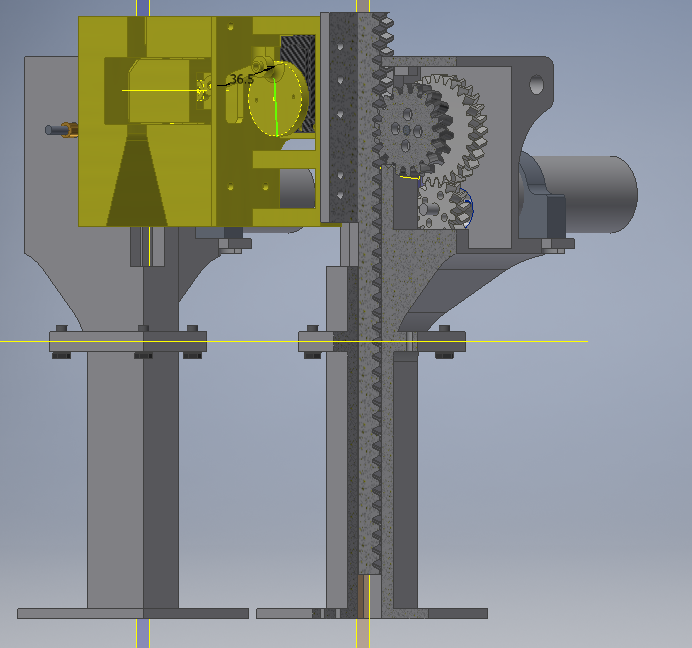
A servo-powered deadbolt attached to a rack-and-pinion based design, which locked to the lander and lifted the robot off of the ground.
 Silas Waxter
Silas WaxterBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



")
 Michael G
Michael G
 Nathan Peterson
Nathan Peterson
 Aaed Musa
Aaed Musa
 Dasaki
Dasaki{kind=link}