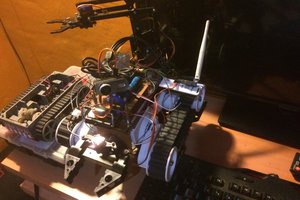
This method allows for a very quick / cheap / good build of a teleprescence robot, and can be deployed on many variations. The usage of the tablet is the same as the first build.
The Raspberry Pi drives two motors, using PiBlaster to achieve the necessary PWM signals through GPIO. Rather than using an expensive motor controller board, I used an H Bridge chip, which allowed me to change directions of the motors.
I used Go to create the control software this time around, and was really happy with the results. I was able to create a very fast responsive web interface, much faster than my previous implementation using PHP!
The Go web interface also has a joystick, which works really well on a tablet/phone, using an 8 axis direction. This works better for navigating the robot through more obstacles than the simpler point and click directions.
There was an IR sensor on it at one time, which would signal the Go program to stop if it sensed an obstruction. I've since reworked the sensor to trip the motors directly instead of wasting computing resources on it.
The ADC chip (Analog to Digital Converter) is used to sample the battery and report how long it has left to live, using Python to read and interpret the values.
This robot does not do any self charging yet..
I originally used PVC to create a chassis, in a tripod configuration to support the tablet. I've since used aluminum and only need one "pole" to mount the tablet.
 Rishaldy Prisly
Rishaldy Prisly
 Alexander Kirillov
Alexander Kirillov
 Keith Elliott
Keith Elliott
 Radu Motisan
Radu Motisan