0%
0%
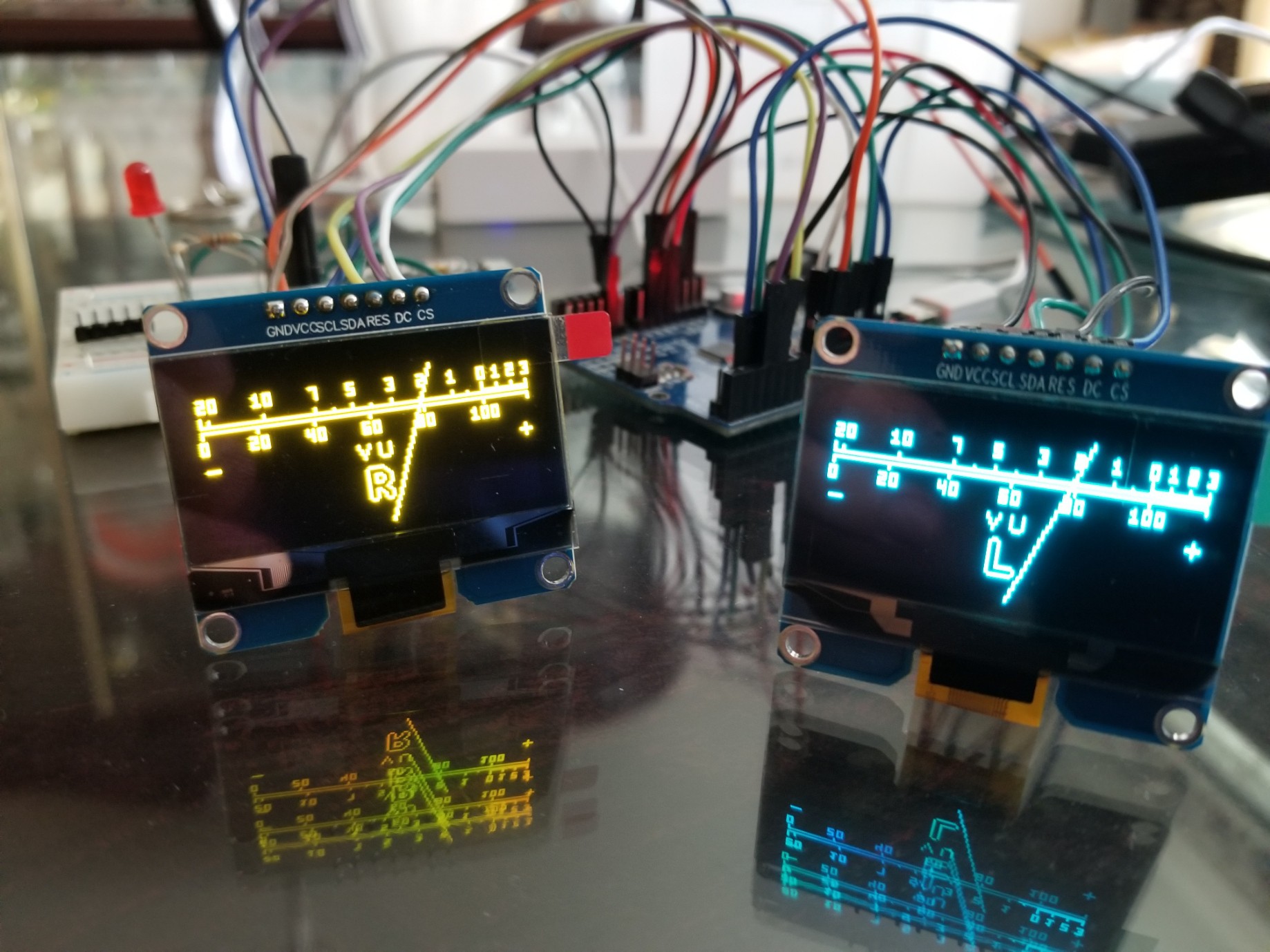
Digital VU Meter with Analog Physics
A digital VU meter that looks and moves like an analog needle with mass and spring oscillations
 sjm4306
sjm4306Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








 David Cain
David Cain
 David H. Bronke
David H. Bronke
 Neo
Neo
 John Leeman
John Leeman
Здраствуйте !!!! Проект полностью готов?