0%
0%
Recycled IoT pet feeders
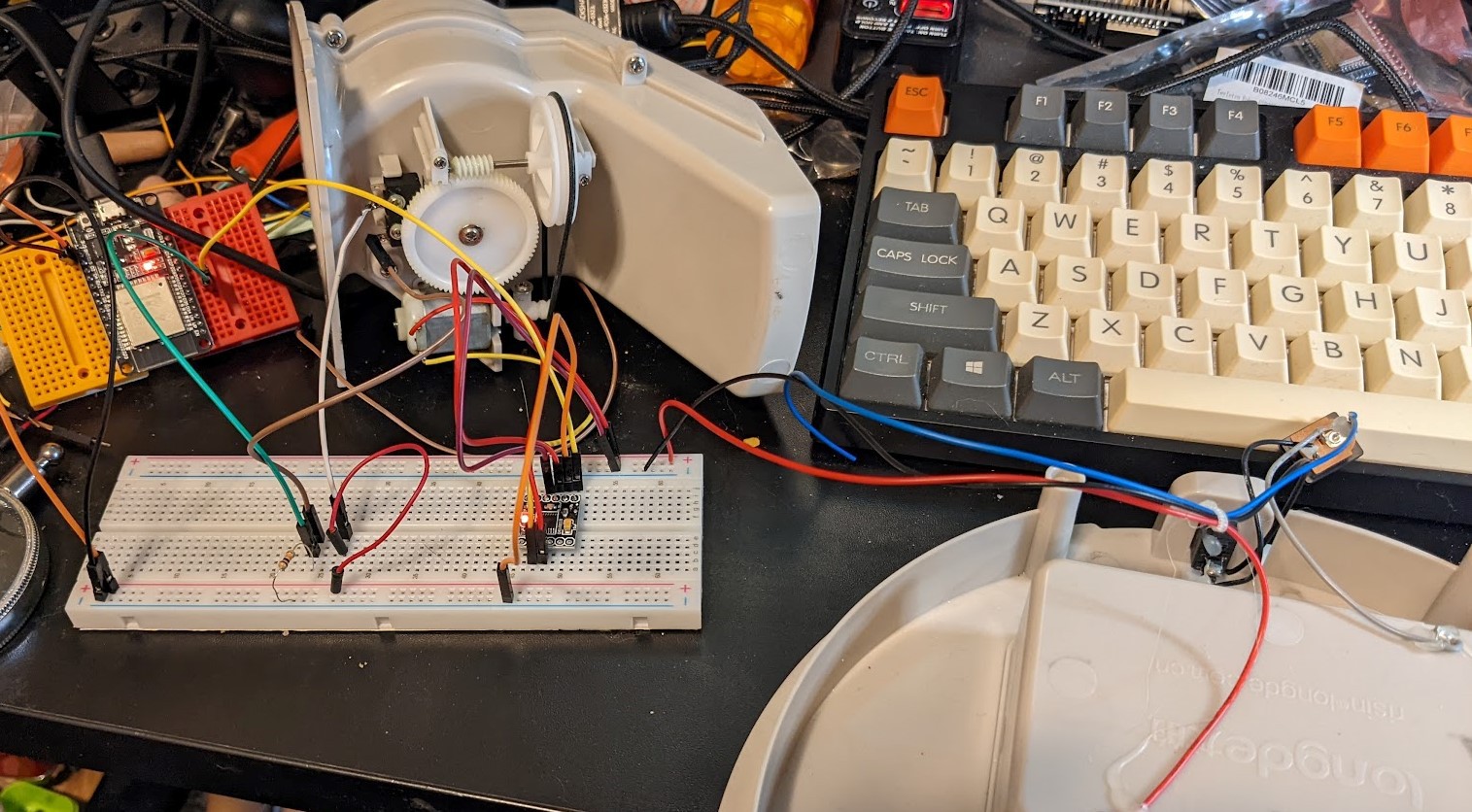
Upgrading 10 year old automated pet feeders with IoT functionality using an ESP32 microcontroler
 Bradley Austin Davis
Bradley Austin DavisBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 10 years in storage had caused the drive bands to lose elasticity and become brittle. They snapped on each of the 3 feeders the very first time they tried to dispense food.
10 years in storage had caused the drive bands to lose elasticity and become brittle. They snapped on each of the 3 feeders the very first time they tried to dispense food. 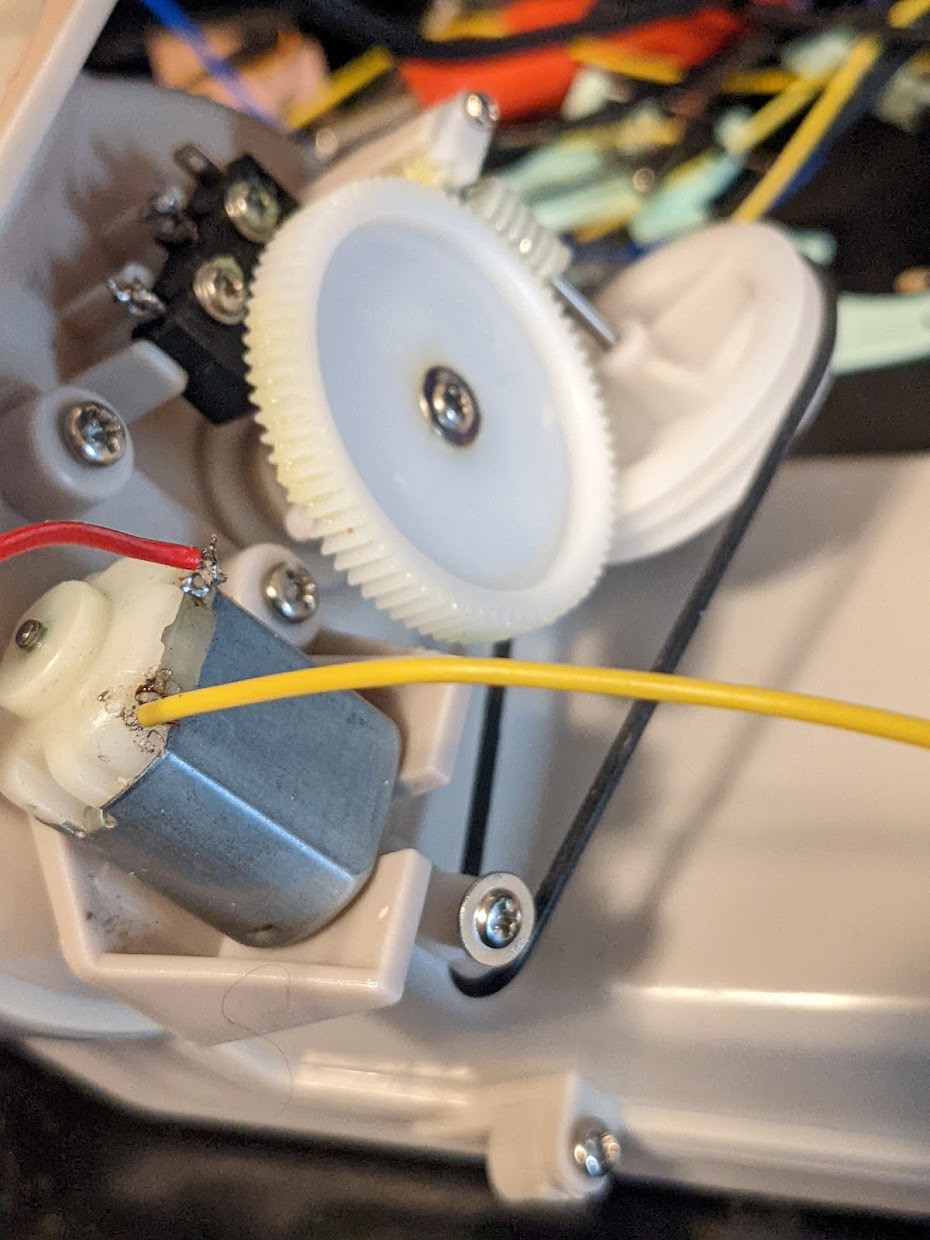
 flynnwt
flynnwt
 Ulrich
Ulrich
 Casual Cyborg
Casual Cyborg