 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠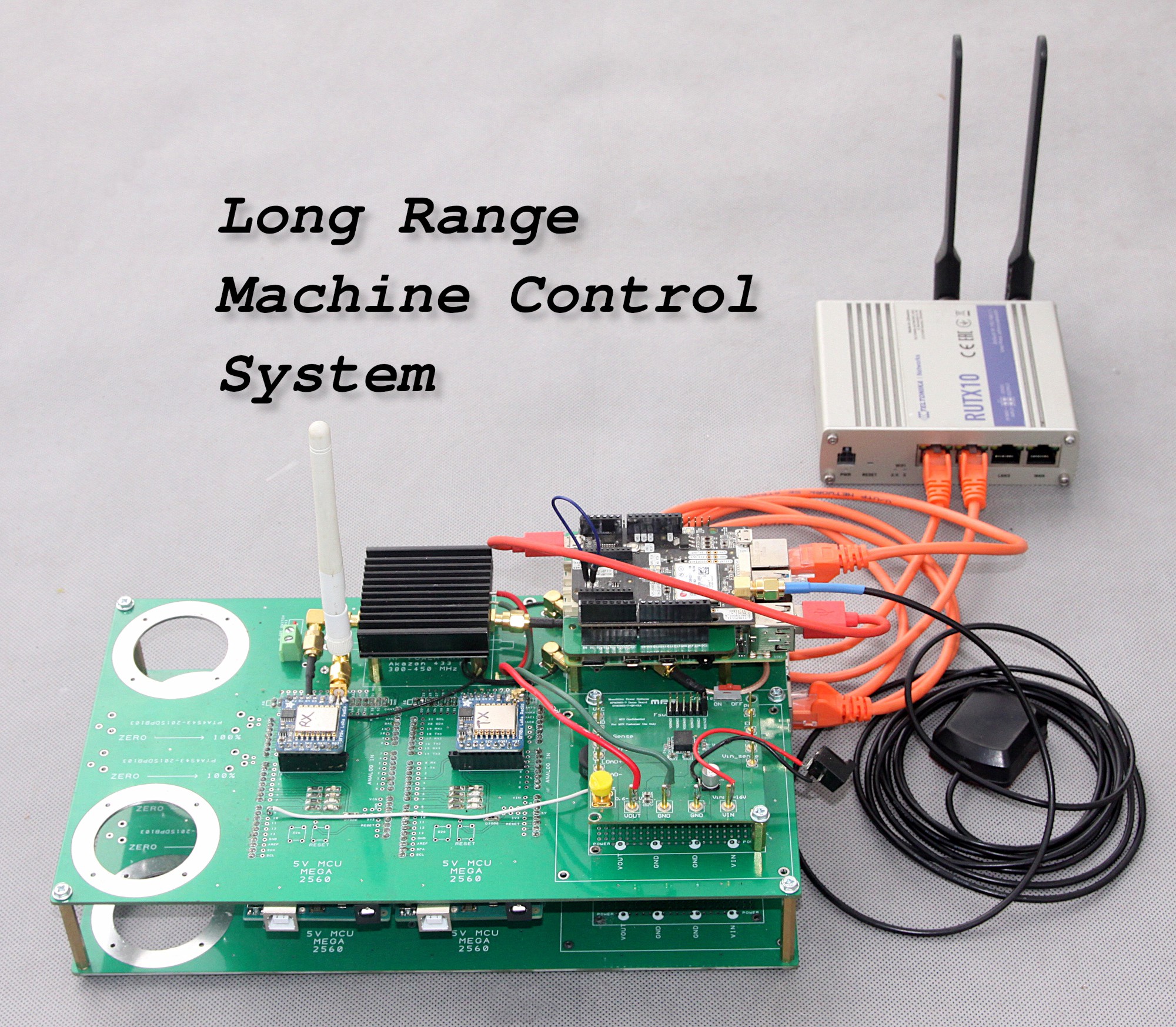
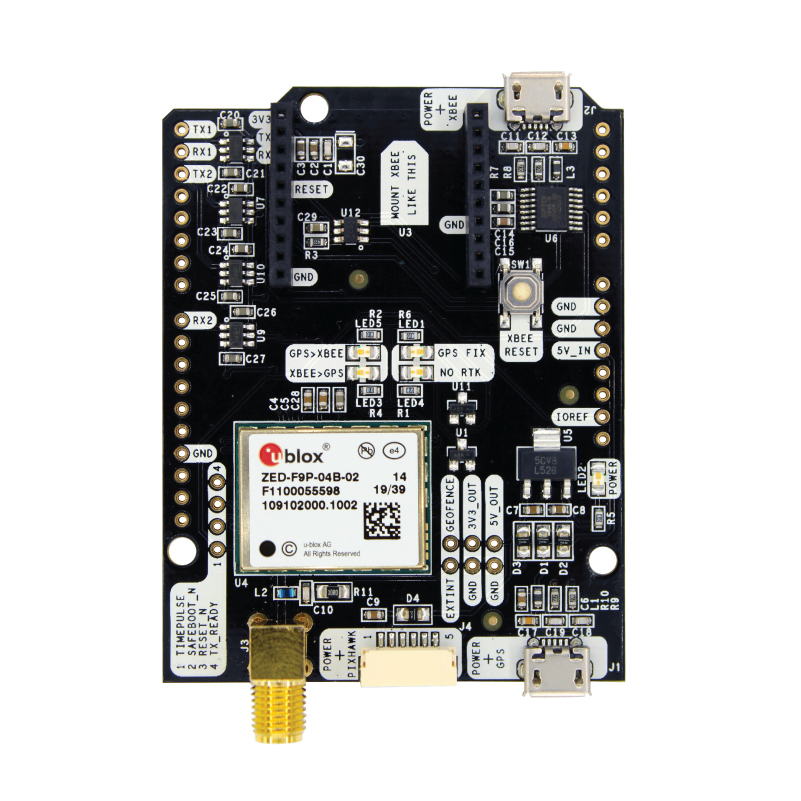
Aim of Project: To transmit chunks of GPS correction data in parallel from one static GPS module to another one bolted onto a distant machine roving about the landscape using multiple LoRa modules.
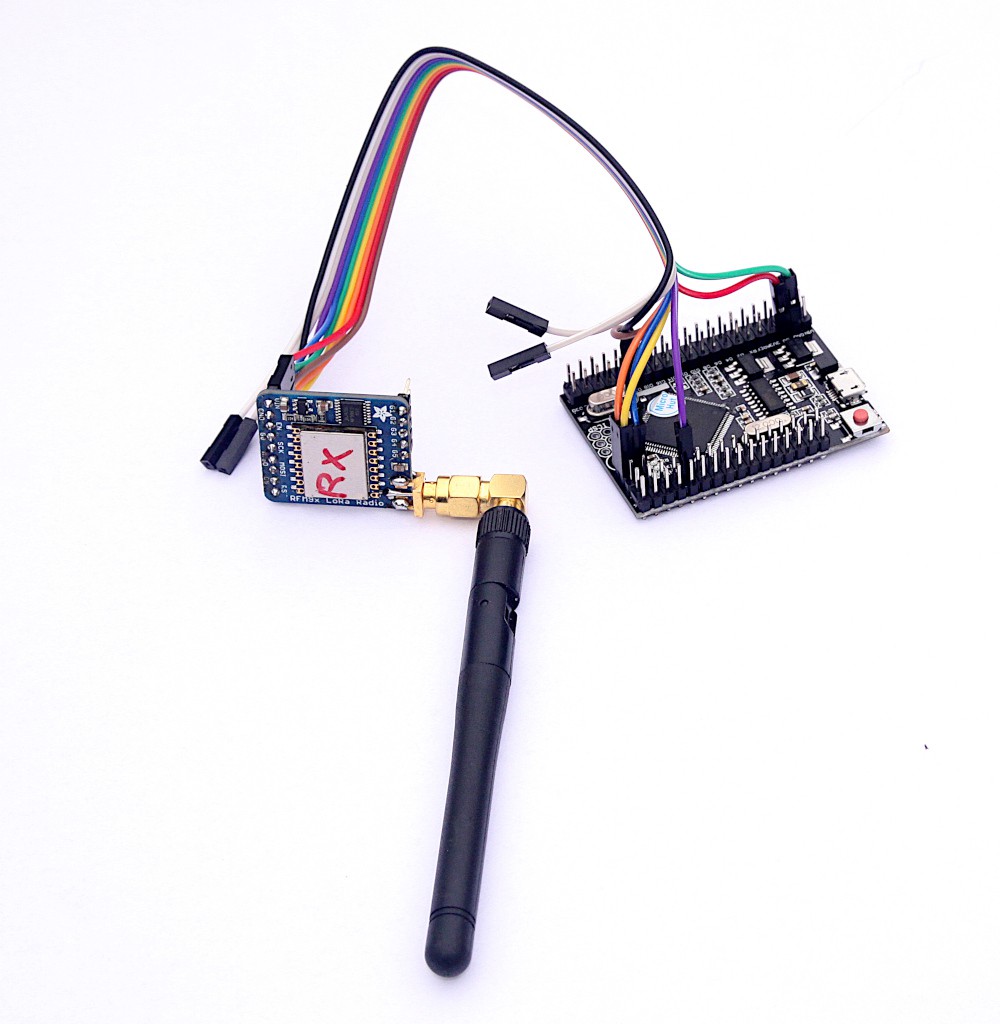
Hypothetical Solution: In the absense of a Starlink satelite system, LoRa radio can be used to transmit the correction data to the machine. Initial tests showed this was possible using just one pair of radio modules relatively close together and it seemed logical that greater range could be achieved by using a small RF amplifier AND extra radio modules. The data would need to be split up into chunks and fed to each of the transmit radios and then re-assembled after being recieved on the machine. To enable greater transmit distances, the LoRa spreading factor needs to be increased, but this has an adverse effect on transmit time and any data with a greater lag of about 5 seconds is rejected by the GPS receiver. The spreading factor can be gradually incresed as more and more radio modules are added and the current design (not yet shown) can have a total of 22 radio modules which equates to 11 transmitters and 11 recievers. How much band width will be required is not yet known. Will the whole thing just explode into a puff of purple smoke? - this is also not yet known.
More Details:
Designed to control machines in post apocalyptic environments, or just where I actually live, these gadgets integrate 4 or more LoRa radios controlled by Mega 2560 MCUs with a Raspberry Pi via ROS (Robot Operating System) so that messages, or data, can be sent over long distances in such as way that outgoing messages do not block incoming messages - it's true duplex. Most LoRa modules are only half duplex, in that simultaneous receive (Rx) and transmit (Tx) is not possible. Apparently, the Thing that I am building is called a 'Concatenater', similar to a gateway that might have 10 parallel channels, but much more flexible in terms of programming and functionality.
There's always a compromise between range and data speed and this system is not designed to be fast or 'Real-time' and there is significant lag between sending and receiving messages. Imagine we are controlling a rover on Mars, but rather than 15 minutes of lag, we have about 10 seconds. In a disaster area such the aftermath of hurricanes, where key infrastructure has been destroyed, this system could be used to relay encrypted messages back and forth to other distant locations without the need for setting up any kind of network, which is what is meant by the term 'Peer to Peer'. However, this does not mean that simple networks could not exist as time after the singularity ticks on.
Each module also has Joysticks and a slider pot so that we can control our Mars Rover from Earth. Obviously, the Rover or 'Dog' does not need the joysticks unless some aliens need to control similar machines on Earth. There is also a vast array of blinkenlights for diagnostics and general notification that stuff is happening, which may also be quite entertaining for the Martians.
This equipment can be used to transmit and receive data and verify the integrity of the data by making call backs. But also can perform actions based on what the data presents. For example, if water levels in a river are determined to be getting to critical levels, various alarms and messages can be created via ROS and sluice gates could be opened to divert water away from settlements..
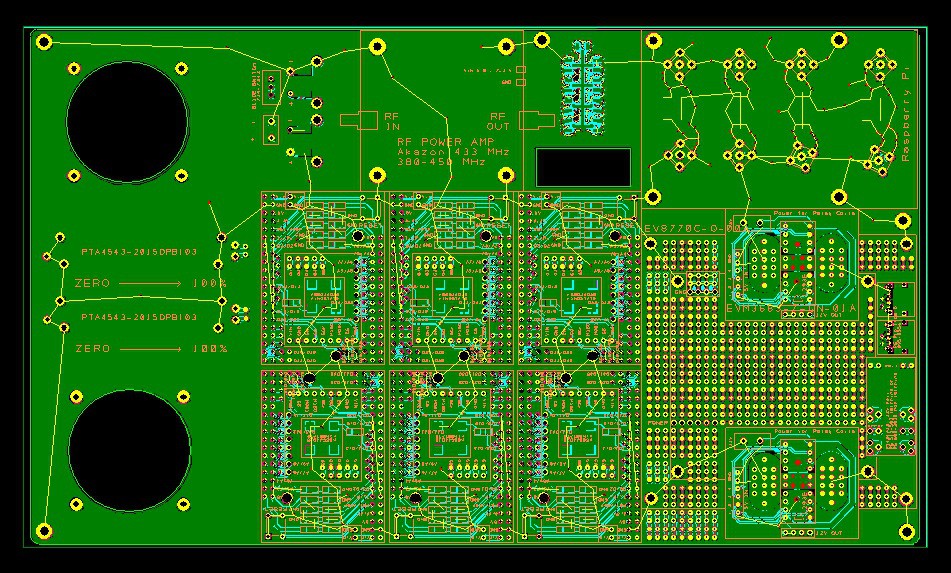
ROS is installed on the Mega 2560's as the 'Rosserial' library and on the Raspberry Pi as ROS Melodic. Communications between the 3 modules happen via USB and ethernet via a router. Other features on the gadgets include a choice of two medical grade power supplies, an RF amplifier for the LoRa Tx and a choice of two surface mounted RF band pass filters.
This system is designed to be as self contained as possible and so 3G/4G/5G was not considered to be a viable option. We did actually try WIFI a couple of years ago, but the neighbors started...
Read more »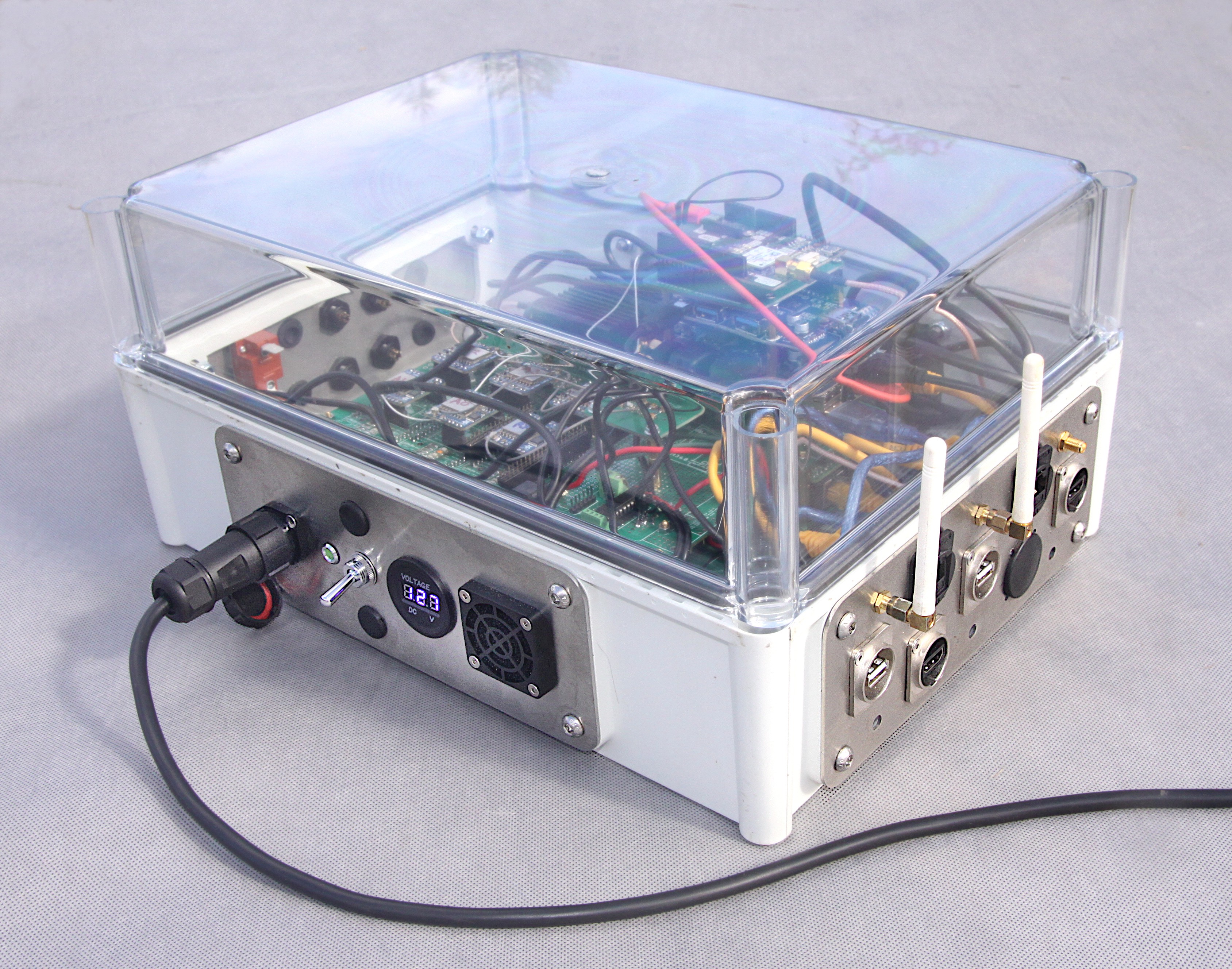




 Cristian Dobre
Cristian Dobre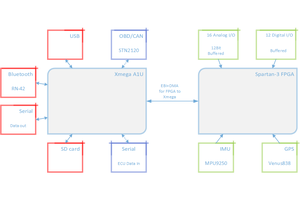
 Nigel
Nigel
 Saabman
Saabman
 Enrico Miglino
Enrico Miglino
is possible make connection sound modem? for example for baofeng?