lion mclionhead
lion mclionhead-
Bridge run
07/17/2023 at 21:02 • 0 commentsA very daring exercise to be sure. Oscillation proved unavoidable but bearable. Noted the leash vibrating & wondered if aliases of the vibration could be oscillating the steering, but it's accepted that stiction of the pot is the reason. The locked down stability of the stick controller is quite conspicuous. It only got that stable after installing a more rigid steering plate & tightening the servo saver.
-
Glitches
07/15/2023 at 05:30 • 0 commentsGot another glitch where it was retracted to several ft & reset to 0. Saw the 0 point on the phone. When it retracts further, the truck firmware clamps it at 0. Other ideas are the power switch glitching, a bad cable, or static electricity from retraction.
The leash logic in the truck is ponderous & had an unrelated bug.
Reducing oscillation has been long & hard. With very low P, I & relatively high D, it's surprising just how damped the leash can get, purely based on input from the leash & not any gyro. It takes a lot of deflection to make it turn but it doesn't oscillate. In a few places, it doesn't respond in time to avoid the curb. Maybe it would be more responsive without oscillating if it used the truck gyro to detect turn rate instead of the leash pot.
Then again, the truck gyro doesn't detect a turn until after the leash detects a turn & commands the servo to move. There is a scenario where a gyro is stuffed on the leash board. Then it just detects the difference in rate between the leash gyro & truck gyro. This would give the fastest rate updates but absolute heading would be prone to drifting. The pot would always be necessary to anchor the gyro.
Reduced P yielded another problem where fully deflecting right or left can cause it to run away. It won't turn enough to retract the leash, instead extending it when it moves. In the fully deflected mode, you have to slow down. 1 idea is reducing maximum speed proportionally to the turn angle. This might allow higher maximum speeds than it can currently reach.
The speed limit is only to keep it from running away. If it's going forward, it'll run into the lion or it'll deflect sideways before it runs away. If it's going sideways, it'll go in a circle. If it completely breaks & only detects maximum forward, it could run away. Reduce the speed too much & it'll erratically lock the wheels, losing steering control.
-
Broken leash 2
06/27/2023 at 04:41 • 0 comments![]()
![]()
The 1st kaboom case since day 1, an unfortunate side affect of the leash is every failure of the control mechanism results in full throttle until it runs into something. Usually, it eventually settles into going in a circle like a control line airplane. Pull the leash in until it hits you or falls over. In the worst case, the leash could get pulled completely off the truck, disconnect from the serial port, & the mane confuser would kill the motors after 1 second. Let the leash go & maybe it'll fully retract, killing the motor. Maybe it'll get hung up & run forever.
Another stress point was revealed. A standoff also broke off. That standoff is in a difficult position. Another model & another step up in robustness followed. More functional than visually appealing.
Leash failure in traffic is still a real possibility. Lions avoid using it in traffic. 1 mitigation has been to limit the maximum speed to 9 min/mile, but it makes the rear camera angle difficult. Another mitigation would be a kill switch on the leash, but it makes the leash heavier. There could be a kill switch as a separate dongle. Finally, the operator could carry around the paw controller at all times. The paw controller could override the leash whenever it was on. It would be hard to access the paw controller. The startup time for any RF system is quite long.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
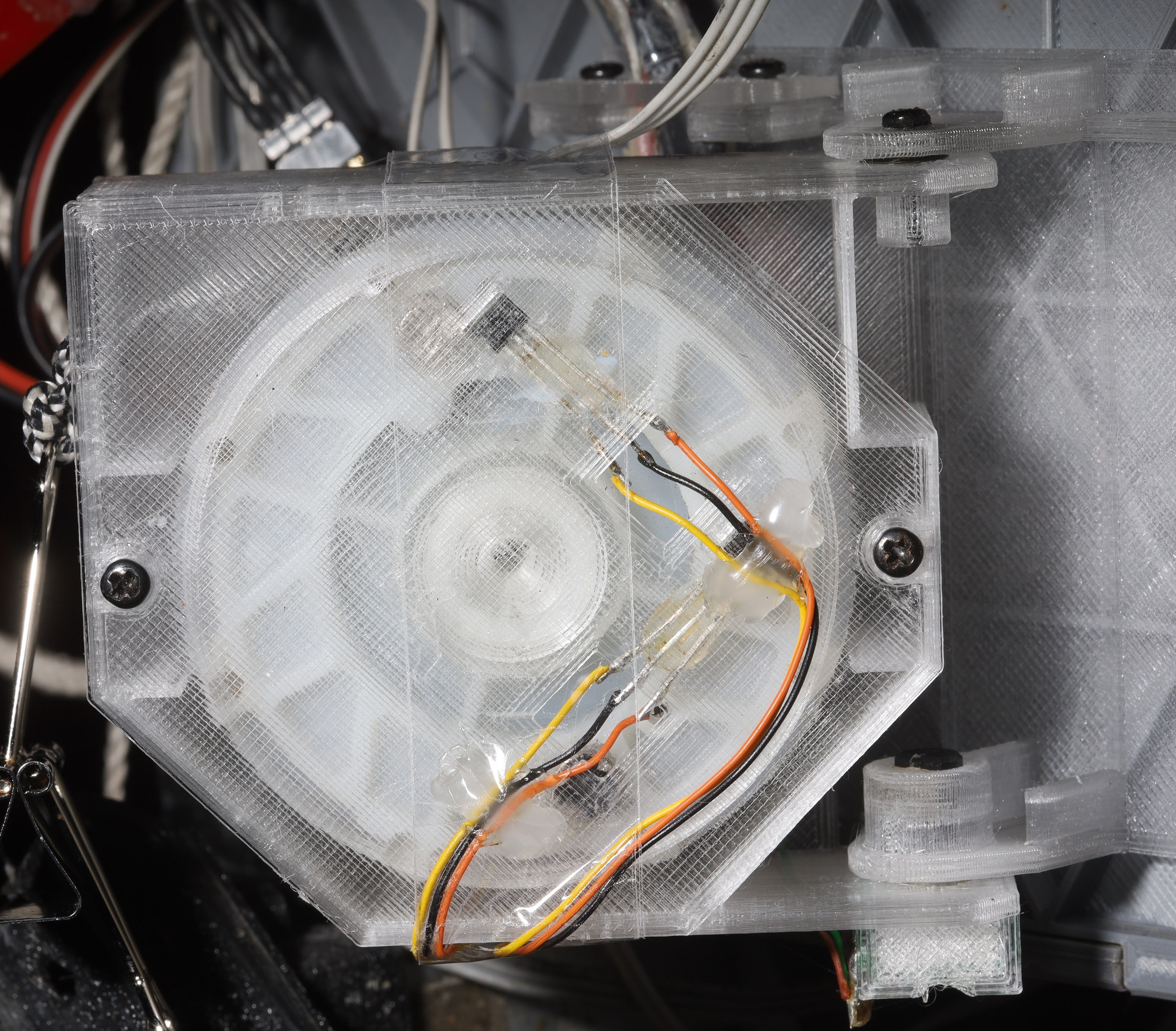
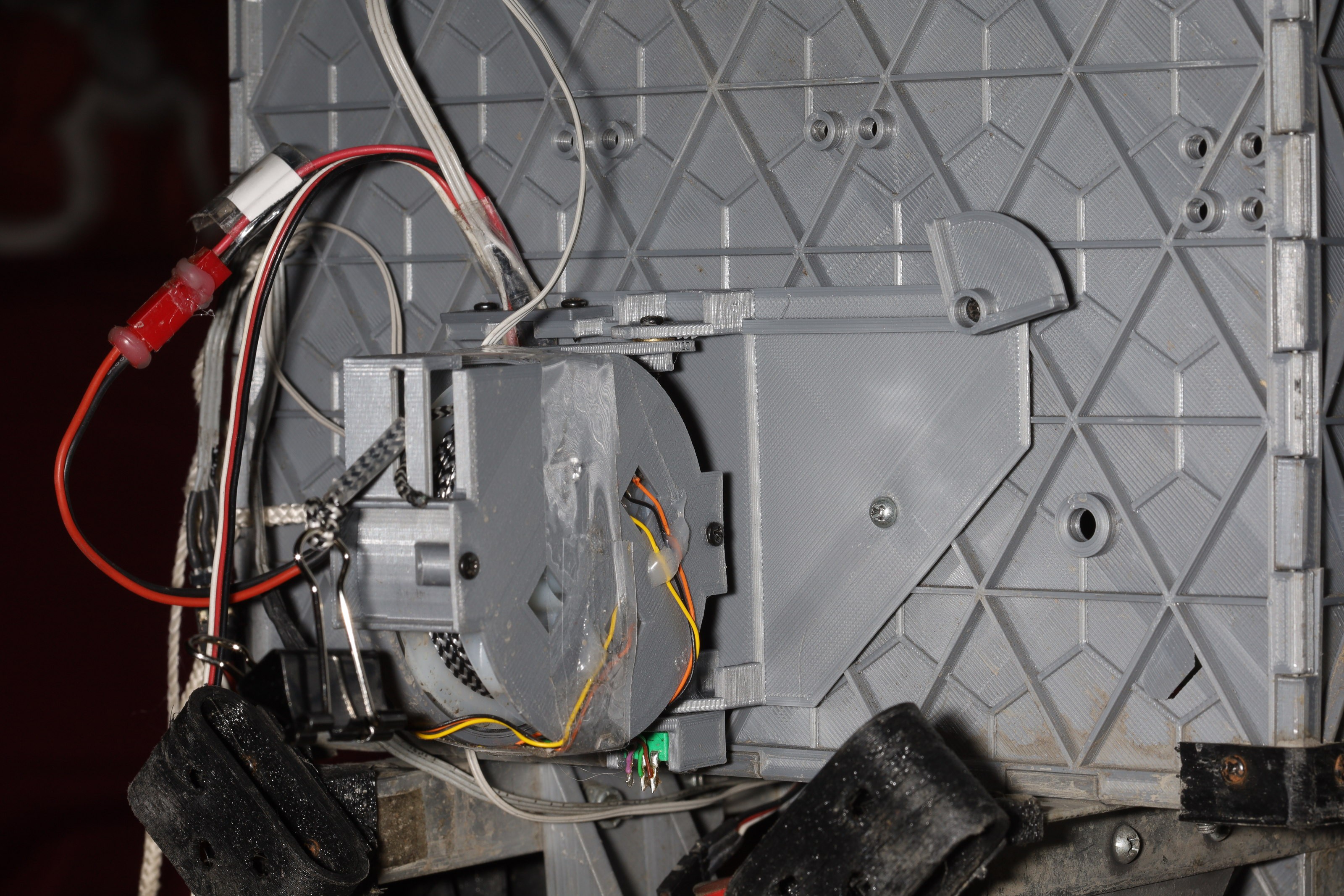
The new leash is a translucent beast designed for observing how everything fits & surviving more bashes. It has more plastic than the other 2 designs.
Sadly, the leash has a glitch problem whereby its measured distance either resets to 0 or errors low for some reason. This has happened only twice. It could be the micro resetting. In both cases, the glitch happened after it was rewound to 0 & extended again. The only way to recover it was to retract it & power cycle it. It could be static electricity.
Another glitch is where it's fully deflected & ends up oscillating between full deflection right & left. It has to be retracted & extended again when in the center. -
Leash cam
05/29/2023 at 00:47 • 0 commentsEfforts at using the leash to point a camera were successful failures. The mane requirement is eliminating oscillation.
Installed a full PID controller which eliminated most of the oscillation, thus causing attention to be drawn to 1 body part instead. It still requires a perfectly flat surface to be the most stable. It needs a smaller integral limit. It might use a smaller D. It's never going to be perfect since the task of picking the heading is done by a transducer mounted on a shaky platform. The transducer is finicky.
The mane problem is centering on the 1 body part isn't the most entertaining composition. The body part is extra large compared to other animals. Defishing deemphasizes that body part. Defish can emphasize the sky or the ground.
![]()
![]()
-
Broken leash
05/29/2023 at 00:45 • 0 comments![]()
Those of us enamored with snapping the leash back were disappointed to find the paperclip getting destroyed by the snapping back. It has to be gently rewound. There's unlikely to be a better system than the paperclip. Maybe there can be a backup paperclip in case the mane one gets smashed. There could be a 2nd piece of string joining the missing bit, but it would be quite a mess.
-
Cheap improvements
04/08/2023 at 06:37 • 0 comments![]()
![]()
Noted the upper bearing shedding a lot of PLA so another random idea was to add a washer. That instantly got it to drive a lot straighter. It still isn't perfect, but it was an amazing improvement for a washer. It might even be able to handle the neighbor's landscaping. The next step might be to try a smaller washer & silicone grease.
The washer wasn't expected to make any difference in tracking because it still has to rub against the big old pot in the lower bearing. What might have degraded tracking were the large horizontal surfaces being pressed together in the upper bearing. The lower bearing has just enough clearance to avoid rubbing, but it might use another .5mm.![]()
![]()
Finally, the most life altering improvement was using a paperclip for farstening it to the animal. That eliminated the waist strap & made it really easy to farsten to clothing. Just clip & unclip to feed the lion.
It's believed integral feedback would further improve tracking. The mane problem an integral would overcome is the offset between the leash pot & the servo. This would entail moving the feedback to a full PID controller.
The lion kingdom continually searches for a more compact retractable string, but this may be the only thing strong enough to forcibly overpower a steering failure.
-
Waist strap
12/07/2022 at 23:31 • 0 commentsBy meal 3, the lion didn't drop any food while driving. The oscillation still seems to be from friction in the steering. Steering gain might have to be lower. Meal 2 confirmed it was impossible to pour the food while holding the leash without the robot speeding up & getting ahead. Meal 3 was the 1st with the waist strap.
It might be a pain in the mane to put on, but having 2 free paws while driving is a game changer. An animal could probably leave the waist strap assembed & step into it rather than threading the cord lock. You can't feel the robot when using the waist strap. It provides more confidence than pulling by paw. Lions are prone to move their paws in unpredictable ways.
If it drives ahead of the lion, the steering deflects erratically & it goes out of control. This is the 1 kaboom case. It could happen going downhill. There's some braking, but not enough to stop it from rolling down a hill. It could happen in a case where the retraction broke & all of the leash extended. Maybe another animal could run into the leash & pull it out.
Being on the subject of leashes, what most animals use are these folding wagons.
https://www.amazon.com/Sincely-Folding-Utility-Portable-Capacity/dp/B09HBJYKSX
![]()
As far as lions can tell, it doesn't have any steering or brakes. The handle is on a separate gimbal from the wheels. Forget about pulling it 20 miles. It's not paw free like the waist leash. It could form the basis of an off road robot.
-
Meal #1
12/06/2022 at 21:36 • 0 commentsThe 1st attempt to eat while driving had the center "angle" at a 5. This tends to put it right behind the lion when driven with the right paw. Center of 15 puts it to the left of the lion. Center of 0 puts it too far to the right. The center value has proven more useful than expected.
Steering oscillated because of an artifact from offsetting the center angle. The forward motion of a walking animal oscillates. It doesn't affect steering when the animal is directly ahead. When the animal is on the side, the forward oscillation is translated into an angle oscillation. The forward step of the right paw pulls the leash left & makes it want to turn left. The back step of the right paw retracts the leash & makes it want to turn right.
Managing the leash led to half the food being dropped on the road, but this is just a matter of practice. Holding the leash & food wasn't a problem. After a while, you gain enough confidence in it to not look at it.
Then, the experiments done years ago paid off when control transitioned from the leash to the stick controller. The stick controller could go in the clean paw instead of the food covered paw. It took a long time to create a controller which could go in either paw.
There was a tendency to use the force of the leash as a brake. The mane problem with leash testing is weather. Most of Calif*'s rain happens in December. Rain is nearly continuous until January when we don't get any rain at all.