0%
0%
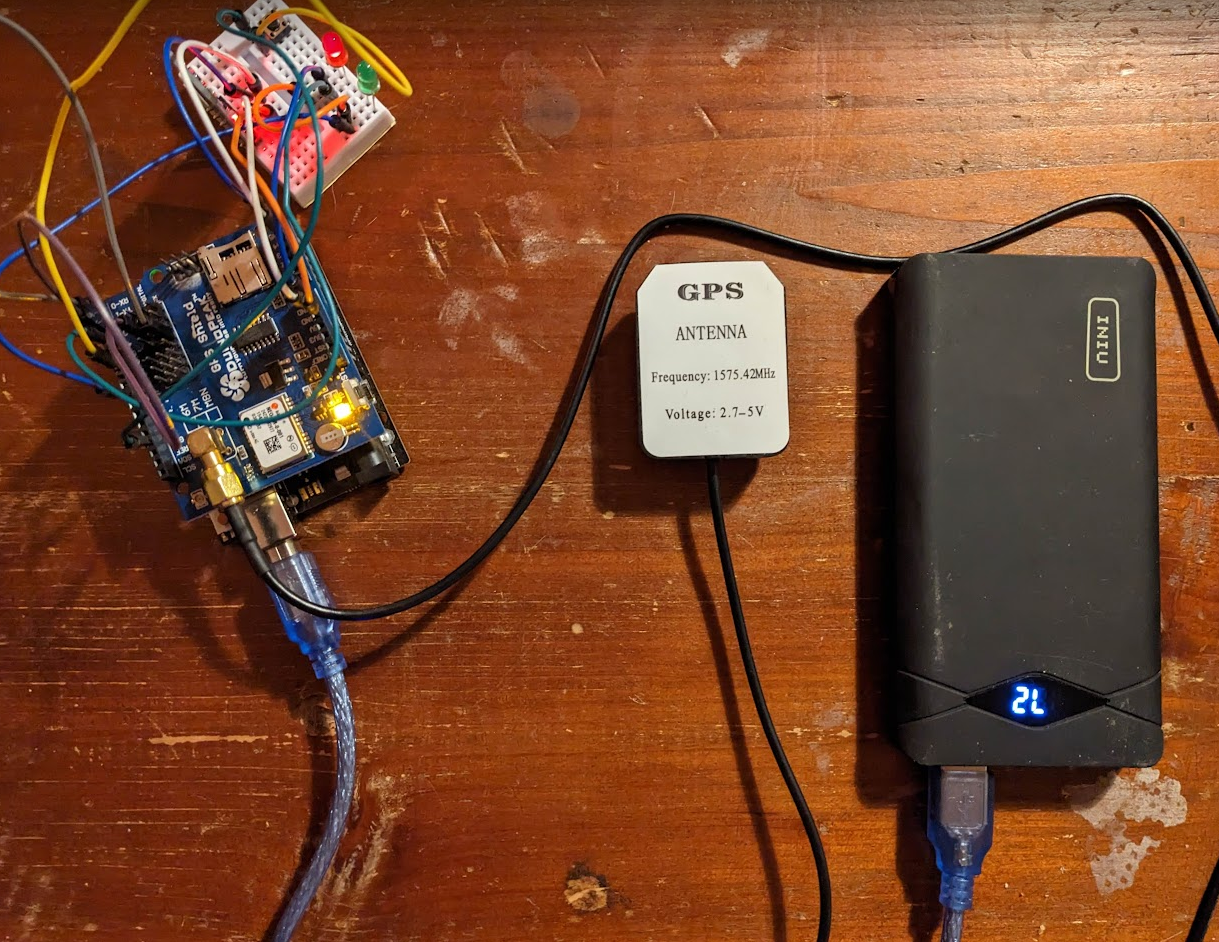
Road quality assessment with IMU device
Could we use the accelerator massively available in today electronic device to monitor road quality
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








 Paige Niedringhaus
Paige Niedringhaus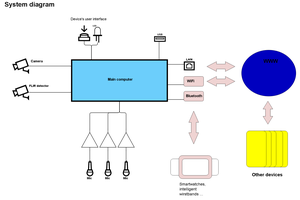
 Konstantin D.
Konstantin D.
I was thinking about a (more ambitious and unrealistic) project that would involve road-condition measurement! One thing I found is that there are vehicle-mounted thermal, optical, and sonic sensors for measuring road surface conditions like wetness, temperature, etc. They're mostly used for weather forecasting and road maintenance, but I imagine a simpler device using those metrics could do the job.
For example, rough roads might absorb heat or reflect light irregularly. In this case, it's probably more complex and less applicable to crowdsourced road data collection than to predicting conditions ahead of one's vehicle, but I thought it worth mentioning!