 Stephen Craver
Stephen CraverBefore we delve into the details of the Smart Recliner add-on, I want to address the construction and appearance of the device. As someone who has been battling MS for over 35 years, I understand that my fine motor skills might not be at their best due to being one-handed. This has led to some challenges in creating a perfect-looking device. I sincerely apologize for any imperfections in the construction. I hope you can forgive this aspect and focus on the potential impact and benefits of the Smart Recliner add-on. After all, it's the functionality and convenience that truly matter.
Who knows, maybe a couple of rainbow or unicorn stickers on it might make it pretty??
6/15 UPDATE: The project is now in the 'prototype' stage. The first, 'sloppy' concept stage mentioned above, has given way to a much more 'professional' look.
At least I hope so.
The Smart Recliner add-on is specifically designed to enhance the lives of individuals with limited mobility, like me, who find it challenging to operate powered recliners with conventional controls. By introducing innovative automation, this device ensures that reclining becomes effortless and accessible for everyone.
My background consists of being an FM radio broadcast engineer for nearly 15 years, eventually jumping ship and landing as a professional software (c#) engineer for the past 20+ years.
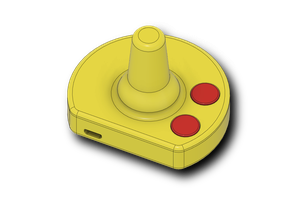
The device:
Introducing the Smart Recliner add-on - Elevating Comfort and Convenience to New Heights!
Overview:
The Smart Recliner add-on is a device designed to enhance the experience of using powered recliners, particularly for individuals with limited mobility. The exciting part? t's not something you can just run out and purchase anywhere, since it doesn't exist! It introduces a level of automation to the chair, bed, or other purposes, revolutionizing the way you interact with your recliner. This device is independent, yet seamlessly integrates with your existing recliner controller, making the transition smooth and user-friendly.
Key Features:
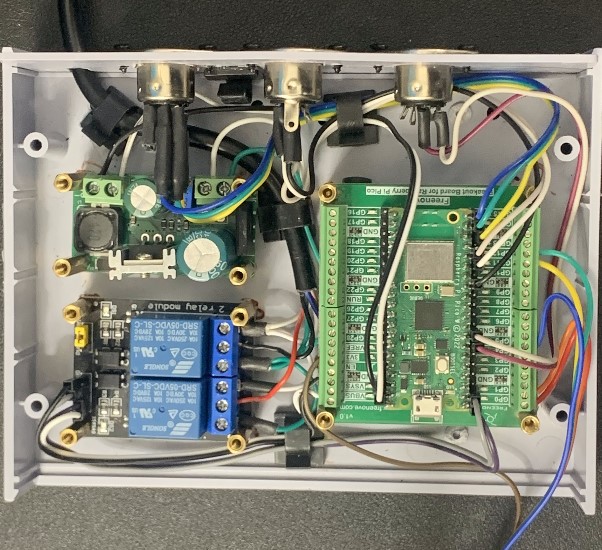
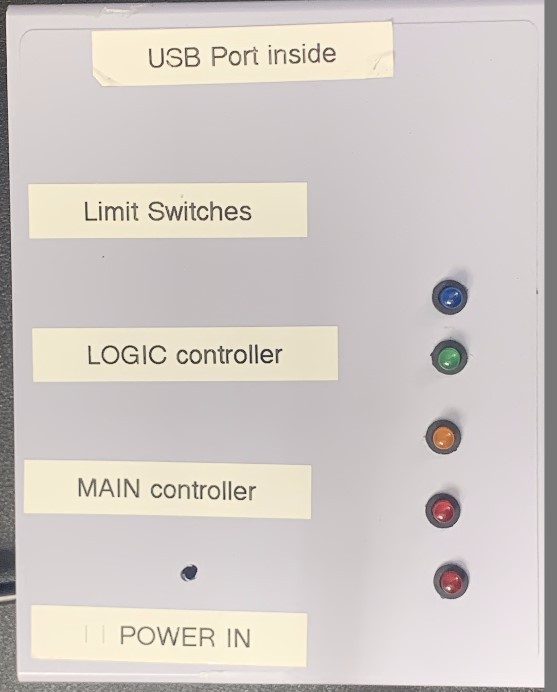
- Dual Controllers: By default and the way powered chair controllers are wired, you can't simply buy a "Y" midi cable adapter and expect it to work. It will not. The Smart Recliner bypasses this limitation by allowing two controllers: the Main Controller and the Logic Controller. The Main Controller is your existing recliner's controller (2 or 4 button) and remains fully operational and transparent under the Smart Recliner's control. The Logic Controller, which also can be a 2 or 4-button model, serves as the automation hub, enabling a whole new level of convenience.
- Two modes of operation: The device offers two operation modes: timing-only and a more reliable and predictable mode that utilizes one or more optional "limit" switches. This advanced mode provides the advantage of precise control when a button is pressed.
- "Timing" mode home position recognition: When using the timing mode, the Smart Recliner "knows" the chair's position (assuming it was powered-up in the normal, upright position) by counting the duration the motor is engaged. "Up" button reduces th1e time, while "Down" button adds to it.
- "Switch" mode home position recognition: The optional limit switches positively identify the normal, upright position, regardless of what position the chair is, or when it was powered up. The two available limit switches are referred to as "Recline Home" and "Lift Home." While they seem to serve a similar function by 'closing' when the device is in its normal, upright position, their primary significance lies in providing the device with a clear indication of how it reached that position. Therefore, it is strongly recommended to employ the use of limit switches for optimal performance.
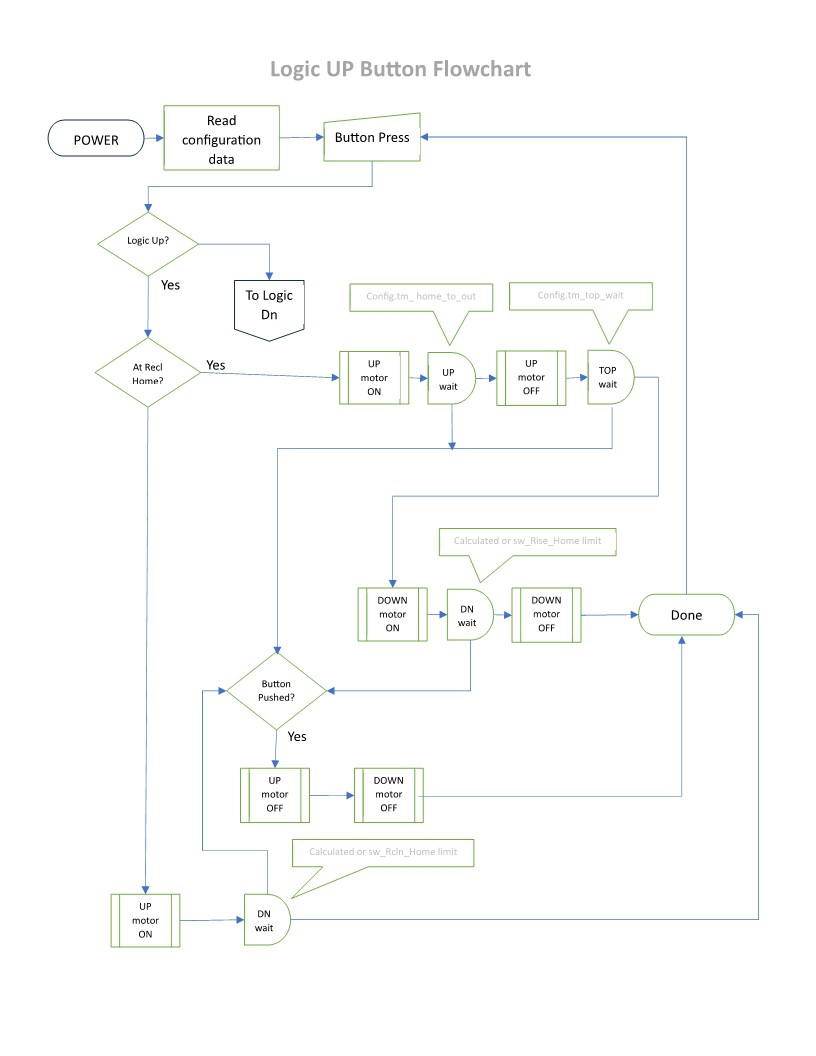
- Automated "Up and Out" Process: Pressing the "Up" button on the Logic Controller initiates the "up and out" process. If the chair is in the "normal" position,...


 Julien OUDIN
Julien OUDIN
 Supplyframe DesignLab
Supplyframe DesignLab
 Sebastian Baca
Sebastian Baca
UPDATE: I unintentionally lied. I have business that will keep me from posting videos for a couple of weeks. Apologies!!