 CiferTech
CiferTech🎯 Features
- Ability to move in 8 different directions
- Control using web server
🧰 Getting Started
We will use ESP8266 as a processor. and we will add an ws2812 Matrix Display to make it look better. Also with the Help of the DRV8833 Dual Motor Driver Module, we were able to control our DC Motors using WebServer over WiFi.
- ESP8266
- DRV8833 Dual Motor Driver
- ws2812 Matrix Display
- DC Motor
🔌 Schematic
Make the connections according to the table and schematic below.
- ESP8266 and DRV8833.
We Should Connect STBY pin to VCC pin.
| ESP8266 | DRV8833 |
|---|---|
| D3 | AIN1 |
| D4 | AIN2 |
| D5 | BIN1 |
| D6 | BIN2 |
| D7 | AIN3 |
| D8 | AIN4 |
| 5V | Vm |
| GND | GND |
- ESP8266 and Matrix Display.
| ESP8266 | Matrix Display |
|---|---|
| D2 | Din |
| 5V | VDD |
| GND | GND |
- Complete Schematic

⚙️ Installation
Before uploading the code you need to install the required library in Arduino IDE. Follow these steps:
- Follow this path Sketch> Include Library> Manage Libraries
- Search for Adafruit_NeoPixel
- Install the library
👀 Usage
After completing all the steps, an access point will be created for you and by connecting to it and searching for the IP address "192.168.4.1", you can access the web server and control the robot.
🤝 Contact
CiferTech - @twitter - @instagram - CiferTech@gmali.com
Project Link: https://github.com/cifertech/OMNI-ROBOT

 selena1995
selena1995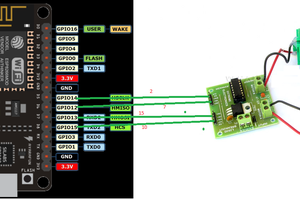
 satya sankar sahoo
satya sankar sahoo
 Jithin Sanal
Jithin Sanal