-
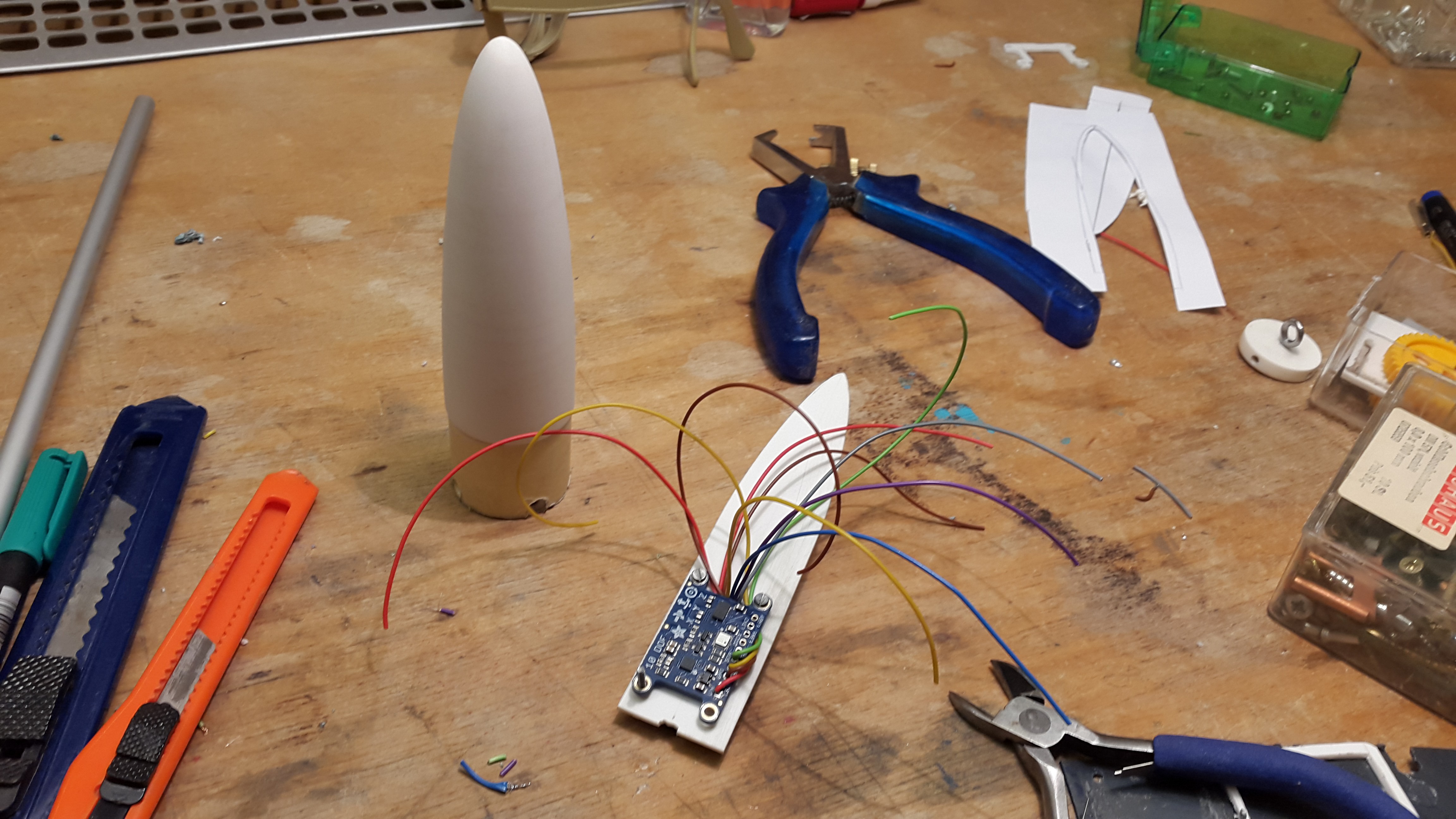
3D printed nose cone
02/09/2017 at 20:23 • 0 commentsI have found a fablab in my town and went straight ahead and printed a nose cone for my rocket. Obviously I had to revise the boardcomputer so it would fit in the new cone.
![]()
![]()
I am hoping to launch it tomorrow (=
-
Houston we have liftoff!!
01/03/2017 at 12:16 • 0 commentsThe first launch with the first version of the board computer was a great success!
Everything was captured by the boardcomputer and the rocket landed only a couple of meters from the launch pad.
Information of the launch:
65g Rocket
16g motor with 10g propellant (B4-4)
Boardcomputer v1.0 30g
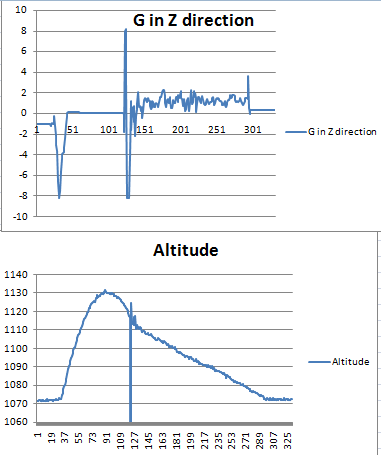
apogee: 60mData:
![]() Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.
Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.Next I want to try to implement the gyro.
-
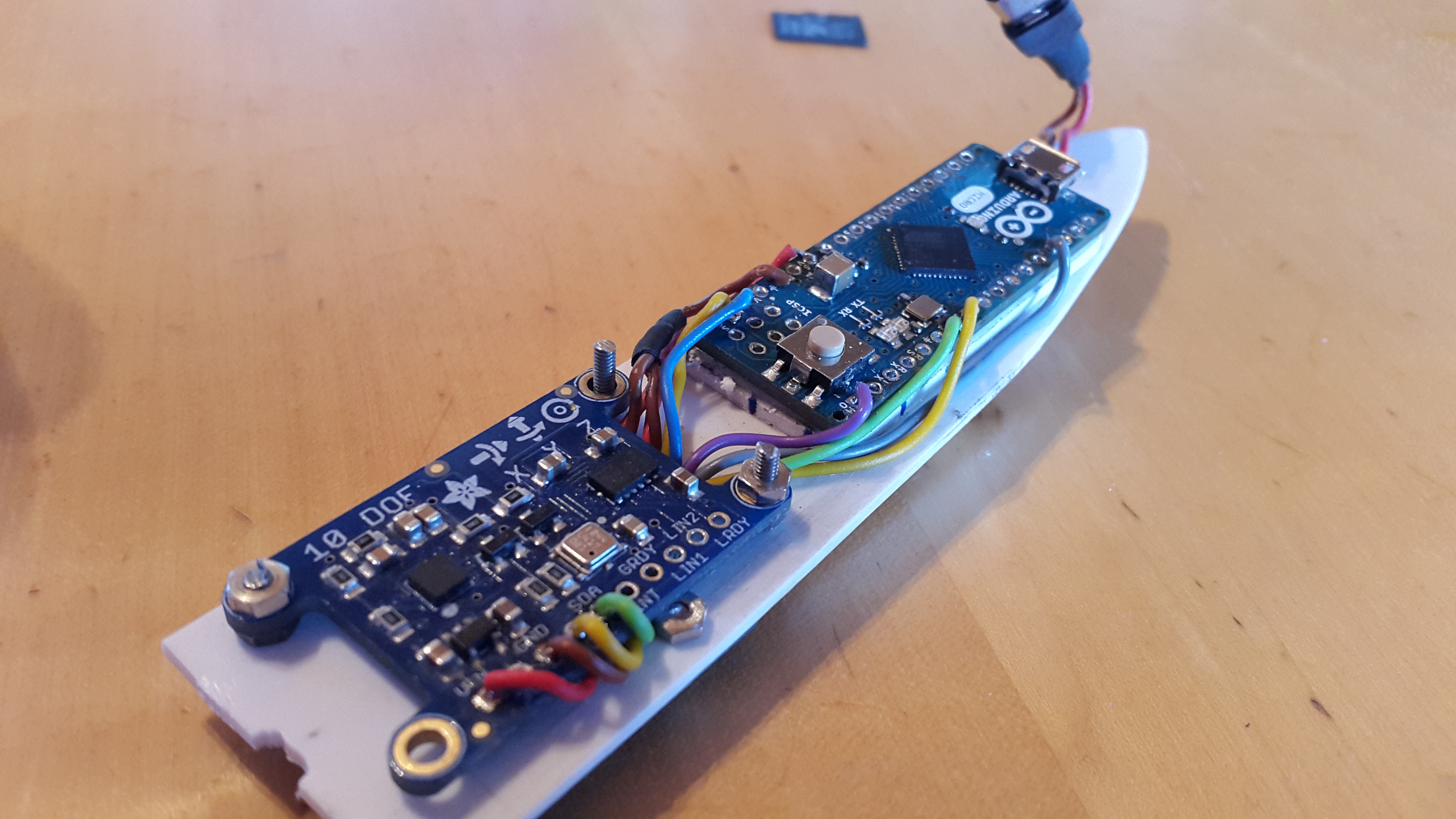
Finished 1st version of board-computer
01/02/2017 at 22:32 • 0 commentsI have completed the hardware and software development of the first version of the boardcomputer. Its only purpose for now is to meassure and log temperature, pressure and with it altitude, and acceleration along the 3 axis.
I will launch it when the weather allows it (=
Mark's Rocket Program
Due to my recently developed interest in rocketry I decided to try to make my own model rockets.
 Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.
Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.