0%
0%
Mark's Rocket Program
Due to my recently developed interest in rocketry I decided to try to make my own model rockets.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
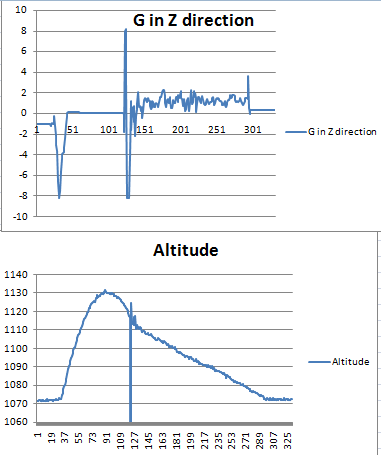 Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.
Unfortunately I set the accelerometer to +-8g per axis and this wasn't enough so there is a cut off. A very interesting thing to note is the downwards spike in altitude. Since I measure the altitude via the airpressure the explosive charge that sets off the parachute caused this wrong reading.
 DTeel
DTeel
 Rocketburns
Rocketburns

 Phantom Chessboard
Phantom Chessboard