-
Line Follower development
02/26/2024 at 13:57 • 0 commentsSome news ... I am currently making some tuning to go faster with the line follower. A video will come soon. I hope so ...
![]()
-
Building and Testing
02/04/2024 at 08:34 • 0 commentsBuilding and testing the car.
I made a radiocontroler in order to check if everything is OK.
Radiocontroler is based on an STM32F103 module + a CC2500 Rx/Tx module.
Car is working great but I have to test it on a less siplery surface, the motor is very powerfull and I have wheelspin at 30% of throttle.
-
Making a radio controller for debugging
01/16/2024 at 11:04 • 0 commentsIn order to test the basic functions of the car, I will make a radio controller.
I made a quick design of the controller with previous submodules that I have done in the past :
- STM32F103 board module
- RF TX/RX CC2500 with PA + LNA board module
- Step Up + battery charger + ON/OFF button board module
- Screen
- Majority of through holes components
- Assembled with my hands (no machine)
Here is a view of the RF controller :
![]()
-
Integration of the ESC on an UNO board
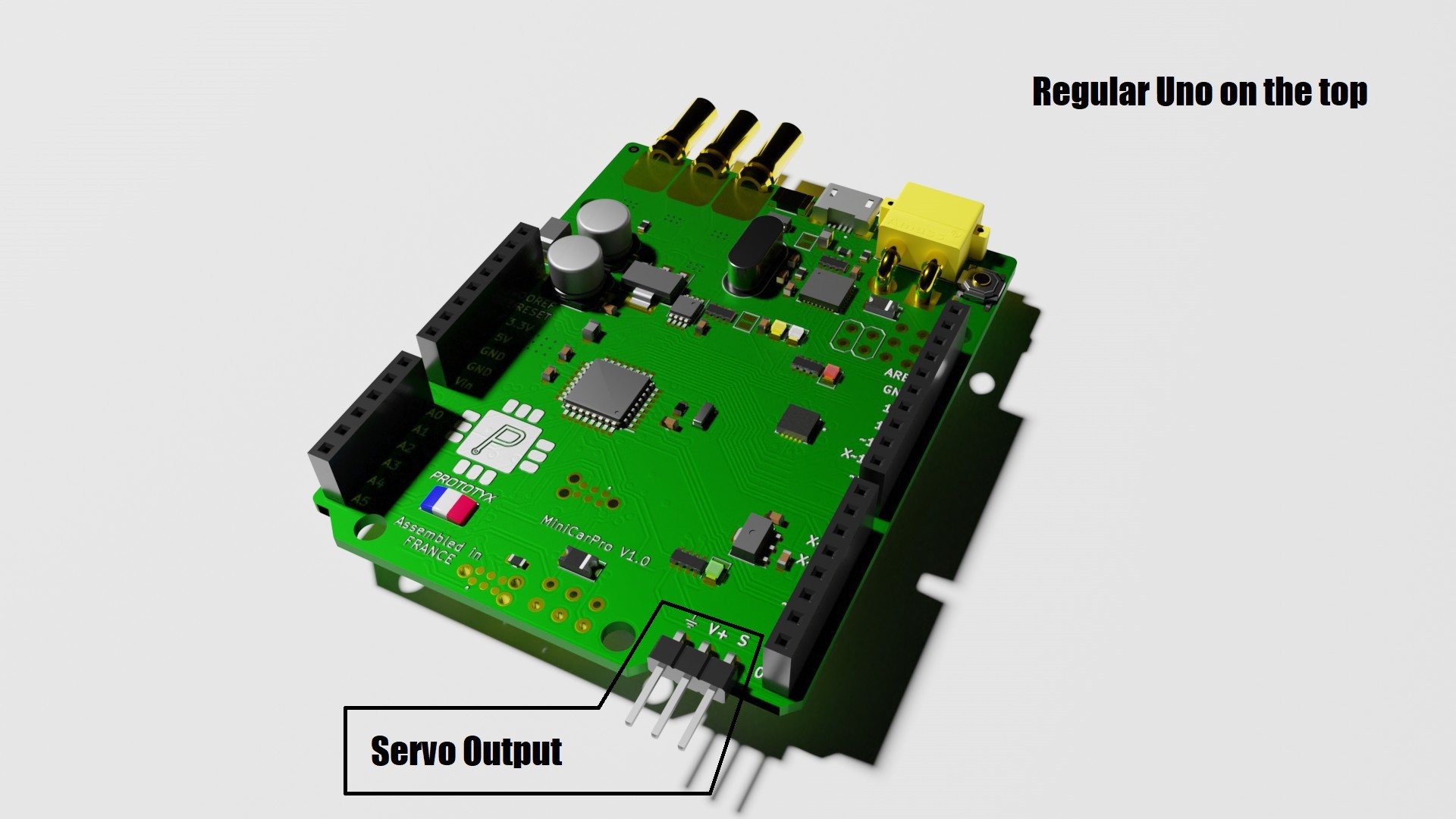
01/10/2024 at 08:44 • 0 commentsIntegration of the ESC and a telemetry module on an UNO board :
This board will have the following characteristics :
- 1 Atmega328P for the Uno Board (Top Face) --> It will send the instruction to the Servo and ESC , will communicate with several sensors and a Raspberry Pi
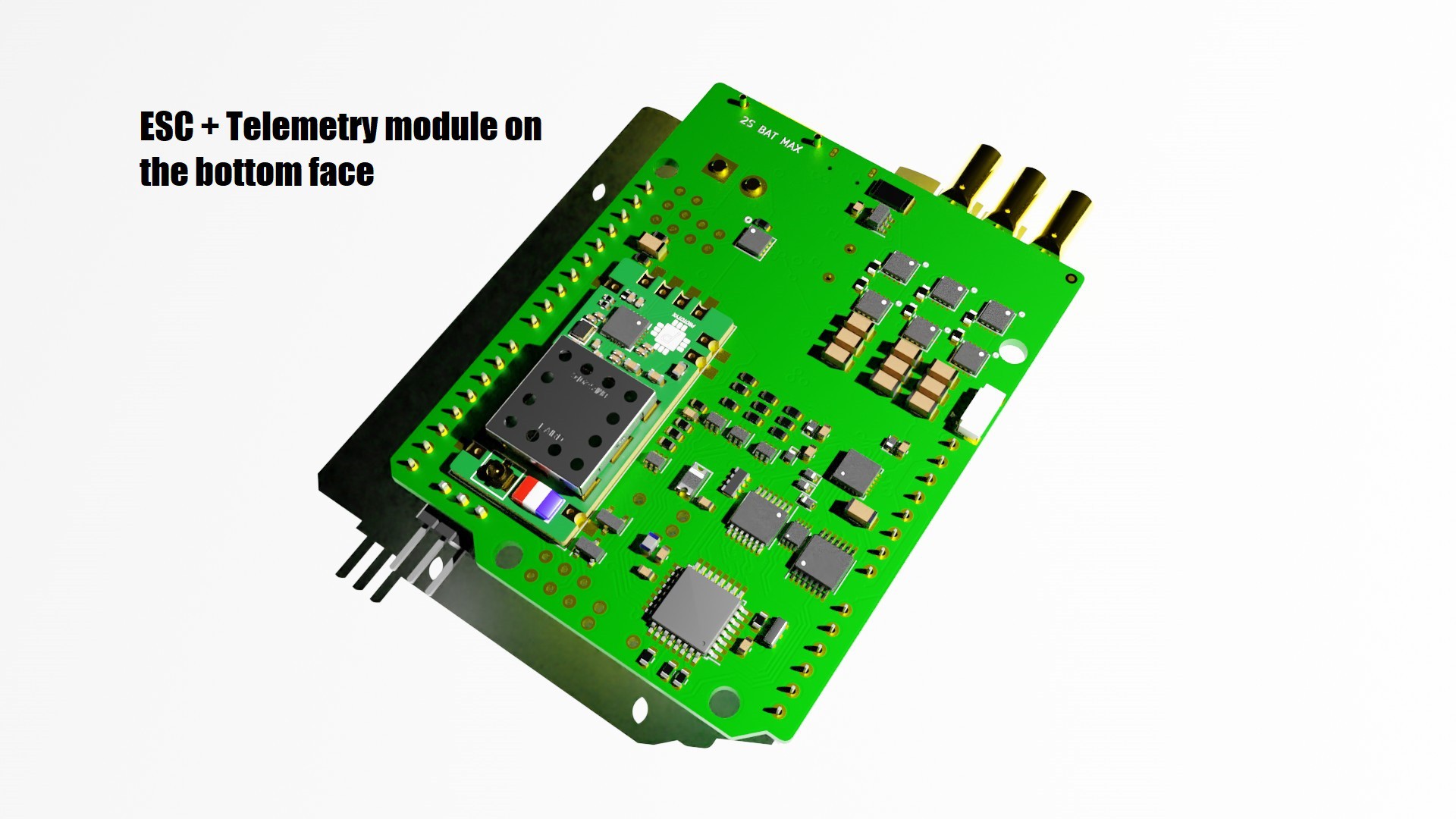
- 1 Atmega328P for controling the motor (throttle, brake) (bottom Face)
- 1 2.4Ghz telemetry module (CC2500 + PA / LNA) that I made in a previous project (bottom Face)
Top Face :
![]()
Bottom Face :
![]()