 mulcmu
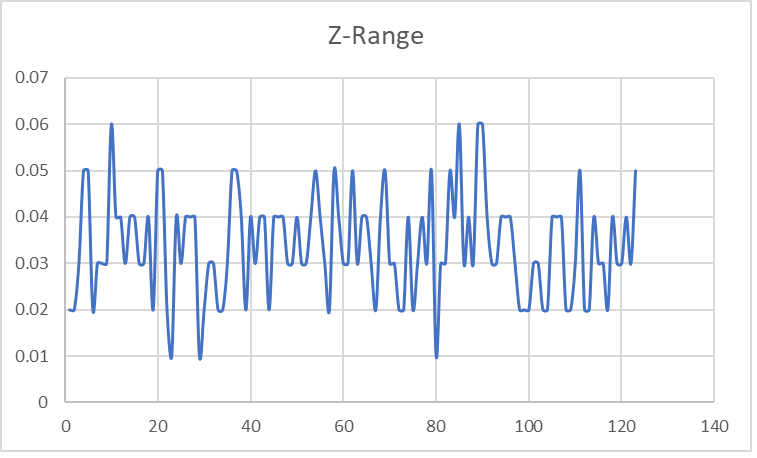
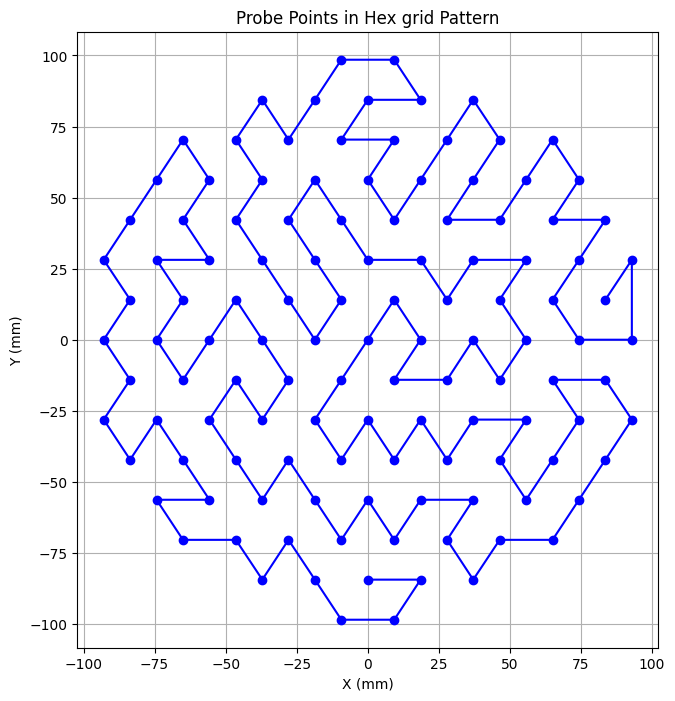
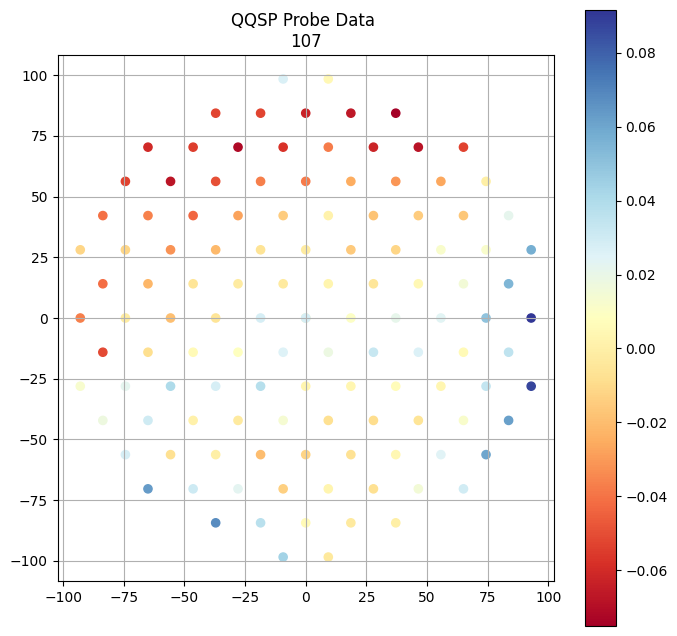
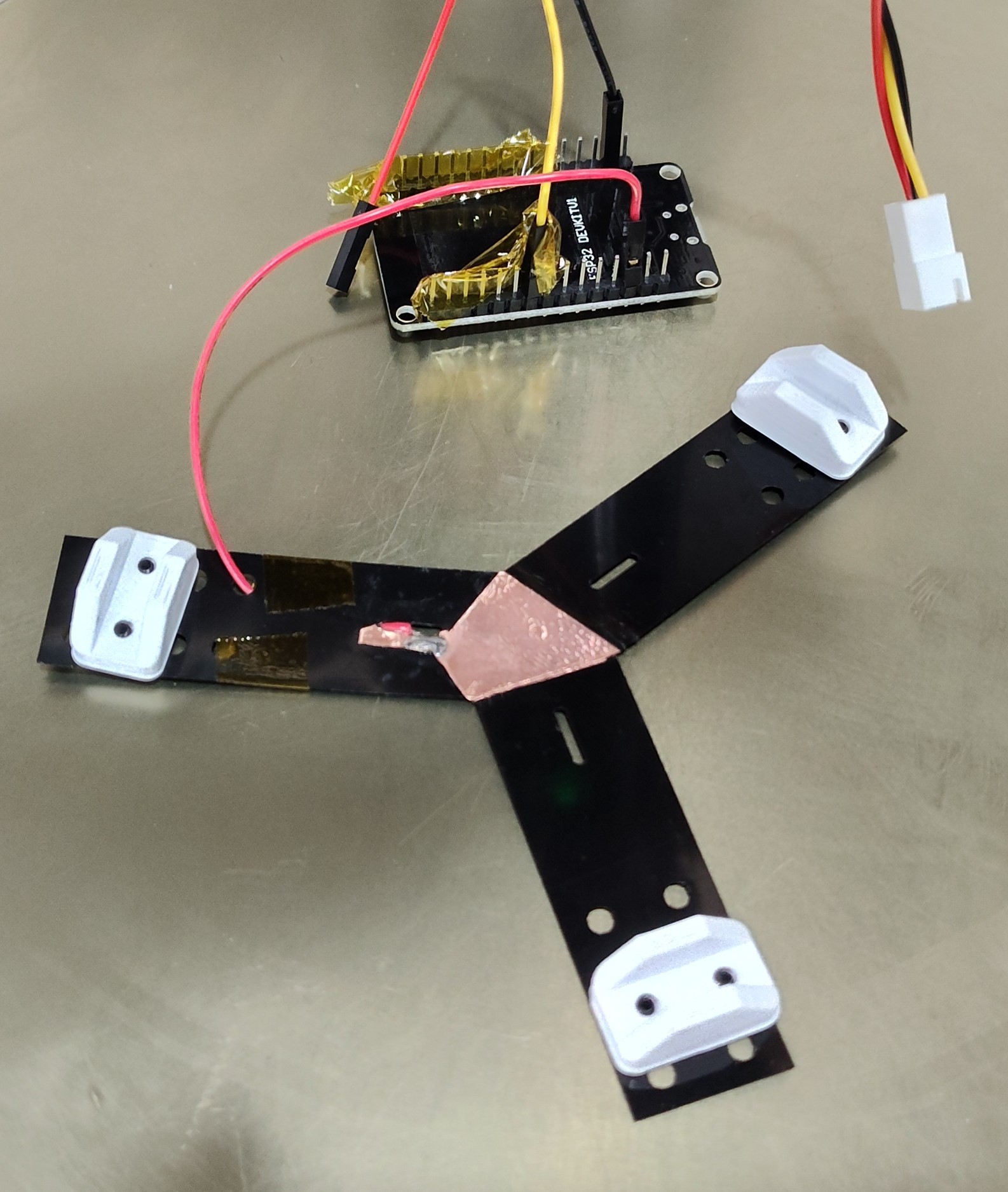
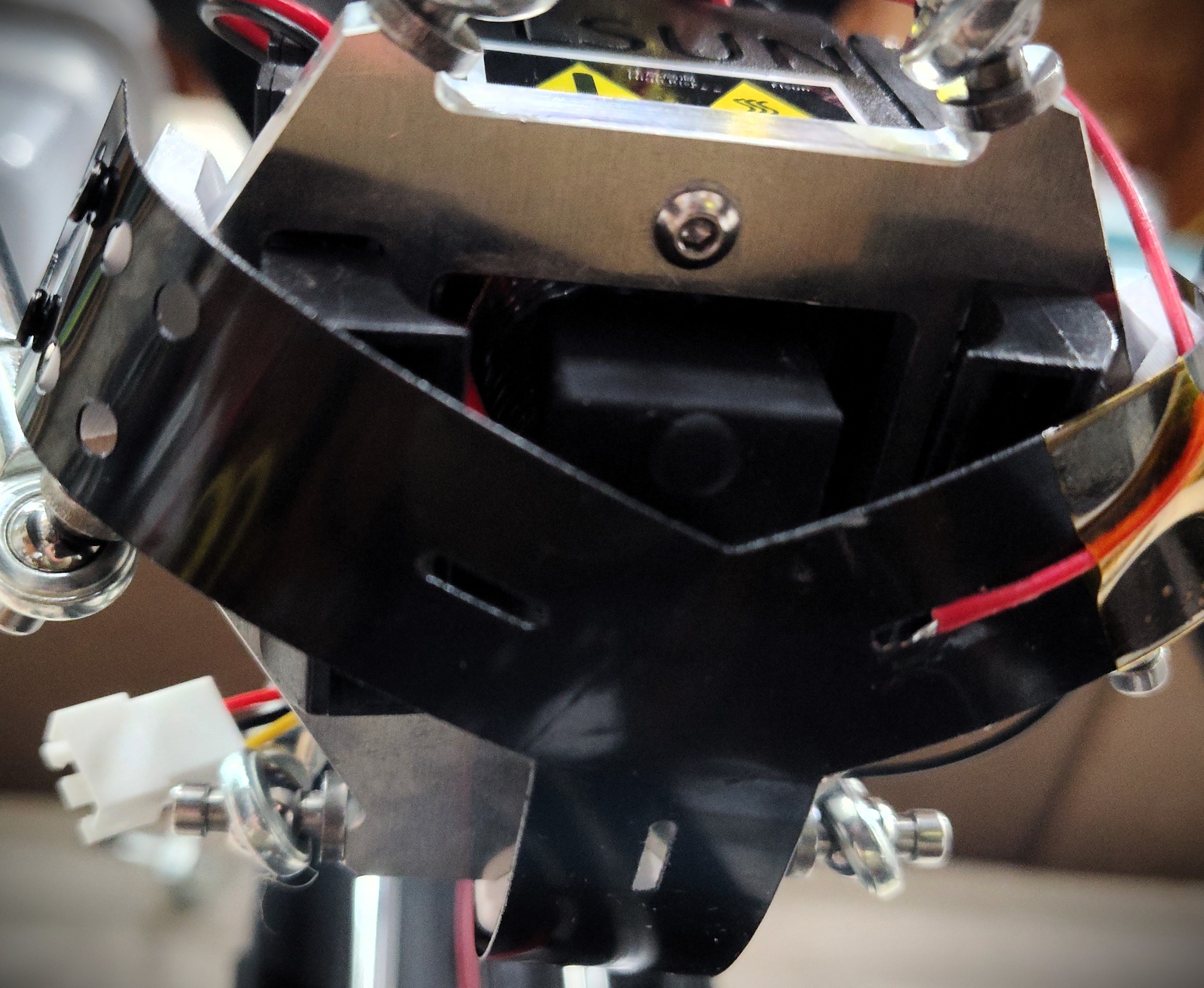
mulcmuThe delta calibration guide for klipper recommends a 0.025 mm consistency or better for automated probing. Testing of this probe location bias on my FLSUN QQ-S Pro with the stock magnetically attached probe showed the bias was at least an order of magnitude higher. A concept was developed to retain a 15mm x 15mm copper pad under the nozzle. As the nozzle lowers the pad will first contact and become parallel with the bed prior to the nozzle touching the pad. The design was refined to use a 40mm x 40mm foam pad and 2nd copper shim to basically make a 5mm thick sheet of paper.
0%
0%
Delta Printer - Capacitive Nozzle Probe
Test accuracy and consistency improvements of a capacitive bed probe triggered by contact with nozzle.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Shawn Gorman
Shawn Gorman
 DeepSOIC
DeepSOIC
 Mark Rehorst
Mark Rehorst
 Daniel Westhof
Daniel Westhof