0%
0%
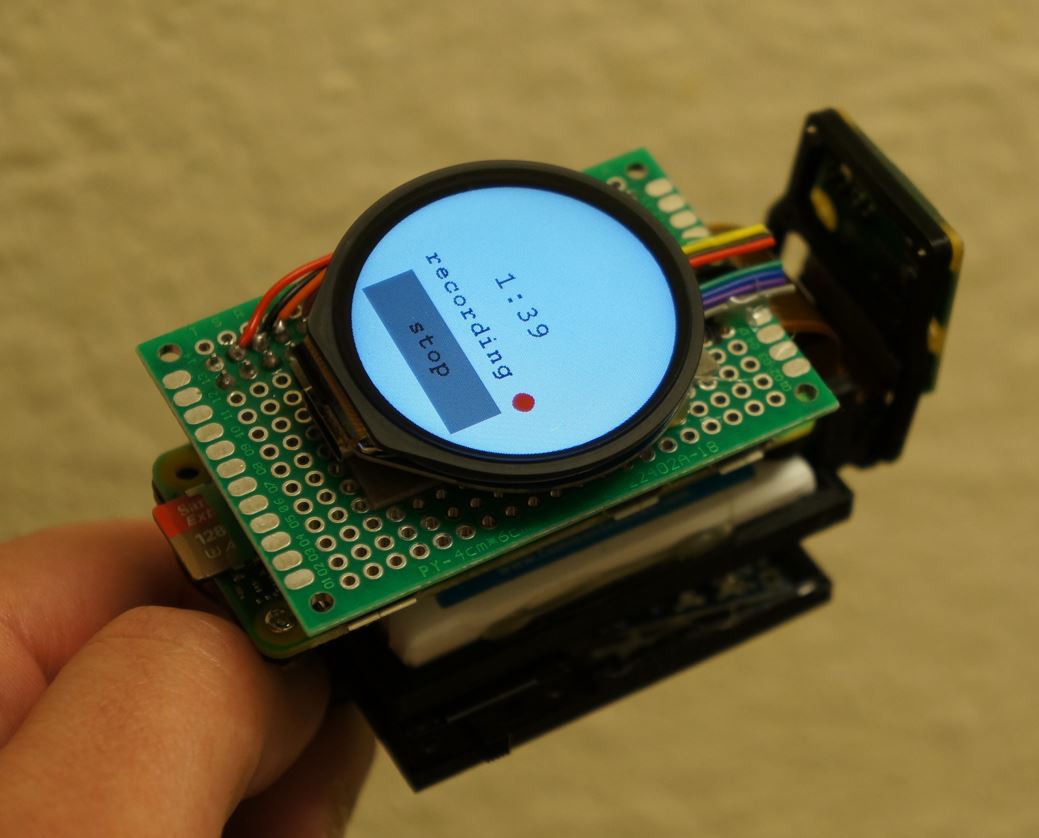
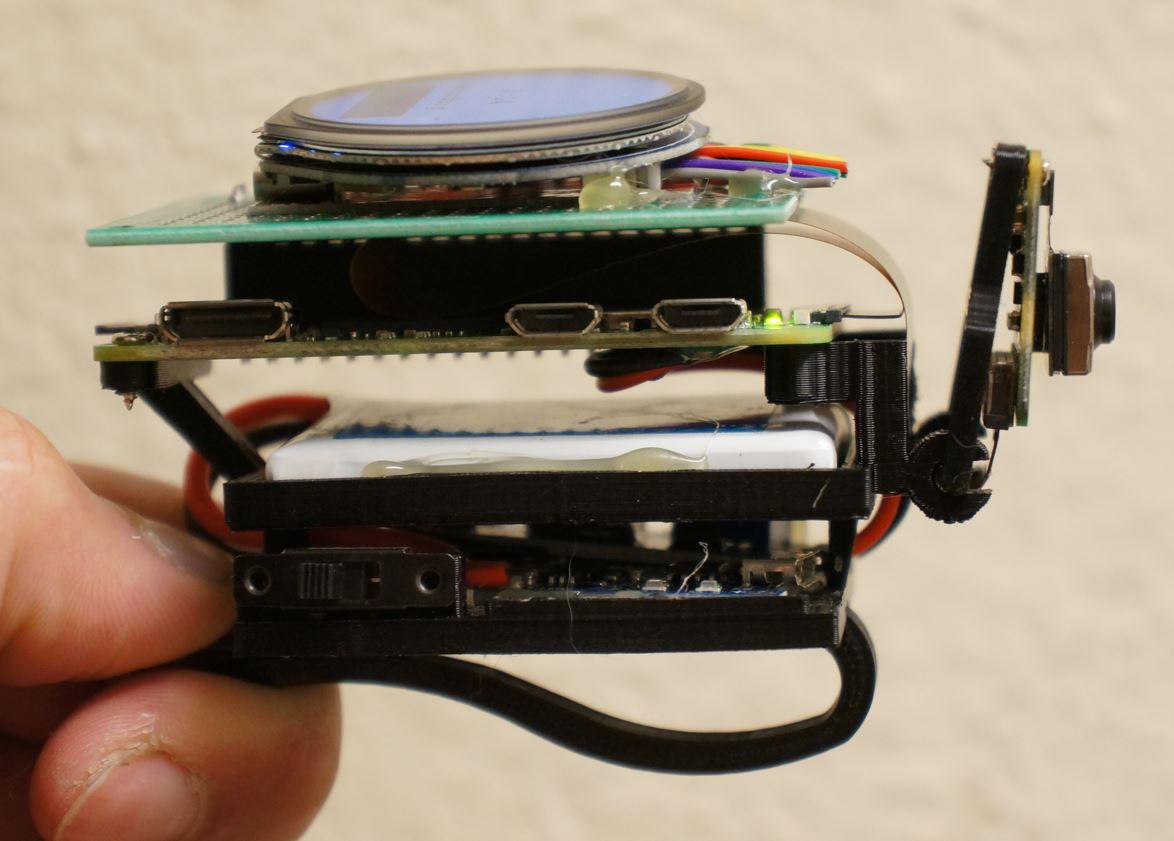
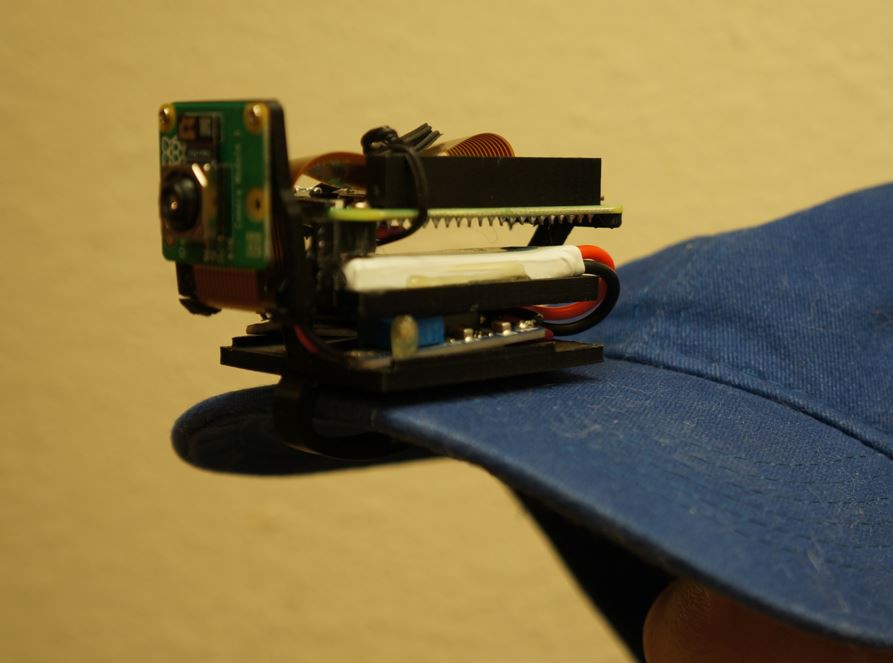
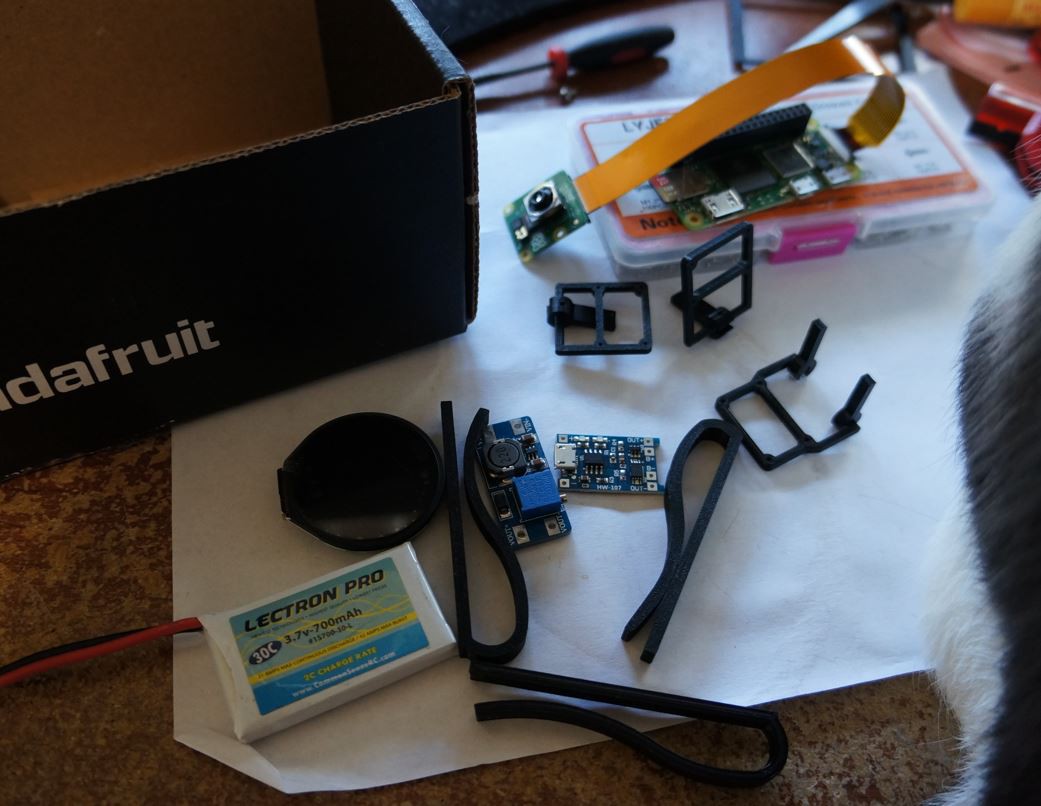
ML Clip Cam
This is a much smaller version of the previous project which the next phase is an autozoom, moving camera on a tripod paired with IMU on hat
 Jacob David C Cunningham
Jacob David C CunninghamBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
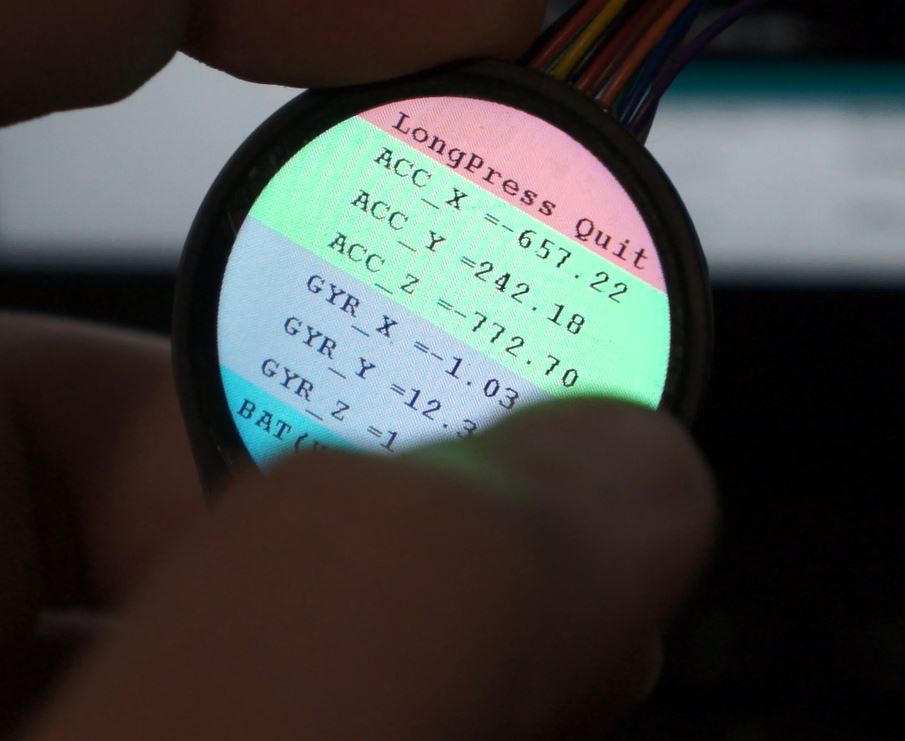













 This display is hardcore
This display is hardcore

 Cameron
Cameron
 j0z0r pwn4tr0n
j0z0r pwn4tr0n
 thesebelik
thesebelik