 Stefan
StefanDownload Ubuntu 20.04 Image provided by Qenginieering (GitHub - Qengineering/Jetson-Nano-Ubuntu-20-image: Jetson Nano with Ubuntu 20.04 image) and burn on SD card via Balena Etcher, plug the card into the Jetson Nano, connect monitor, mouse and keyboard and boot the system.

Make sure that everything is updated to the latest.

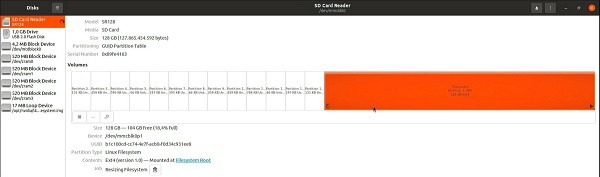
The image is compacted, so the first action is expanding the partition to the maximum. After the boot, click on the lower left corner.
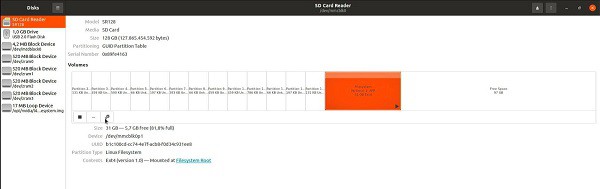
Click on the larger partition on the right and then on the right icon below the partitions.
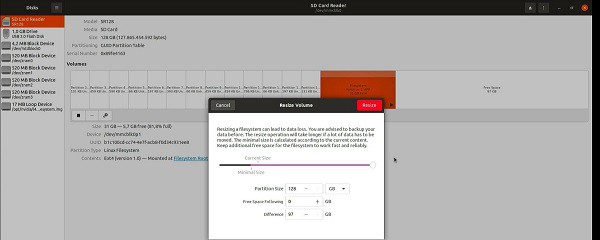
Move the slider all the way to right to resize to the maximum. Hit the resize button top right.
Open the terminal and first delete the swapfile, so the script can create a larger one:
sudo rm /var/swapfile
Download the script, make it executable and start it.
wget https://raw.githubusercontent.com/StefansAI/Yolov8_JetsonNano/main/scripts/yolov8_install.sh chmod +x yolov8_install.sh ./yolov8_install.sh
=====================================================================================
To test real-time detection from the camera device 0 (i.e. USB camera):
yolo task=detect mode=predict model=yolov8n.pt source=0 show=True
To test real-time segmentation from the camera device 0 (i.e. USB camera) with resizing:
yolo task=segment mode=predict model=yolov8n-seg.pt source=0 show=True imgsz=320
To test real-time detection of the GardenCam model on the video clip.:
cd ~/Downloads wget https://github.com/StefansAI/Custom_Yolov8/raw/main/example/GardenCam-best-n.pt wget https://github.com/StefansAI/Custom_Yolov8/raw/main/example/GardenCam.mp4 yolo task=detect mode=predict model=GardenCam-best-n.pt source=GardenCam.mp4 show=True

The typical frame processing times for a 640x480 image is around 70ms for the n-model.

 Nick Bild
Nick Bild

 Shakhizat
Shakhizat
 Travis Broadhurst
Travis Broadhurst