 Giulio
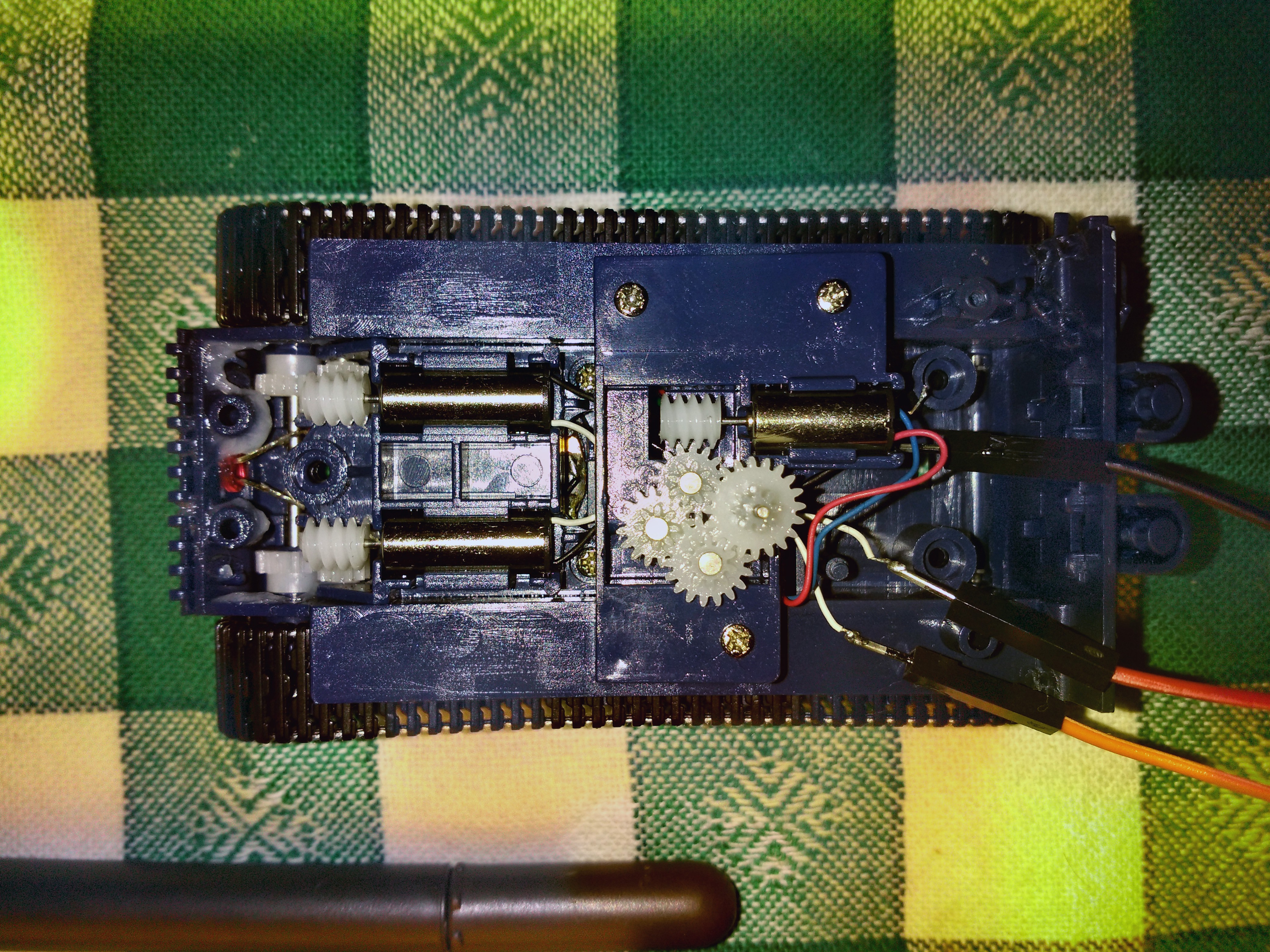
GiulioThe project , mostly software, aims to create a better experience on "non-intelligent" vehicles. In this case a tank.
Hardware modification is needed, but this will result in:
- Customized controls
- Fine precision movement
- Simulated inertia
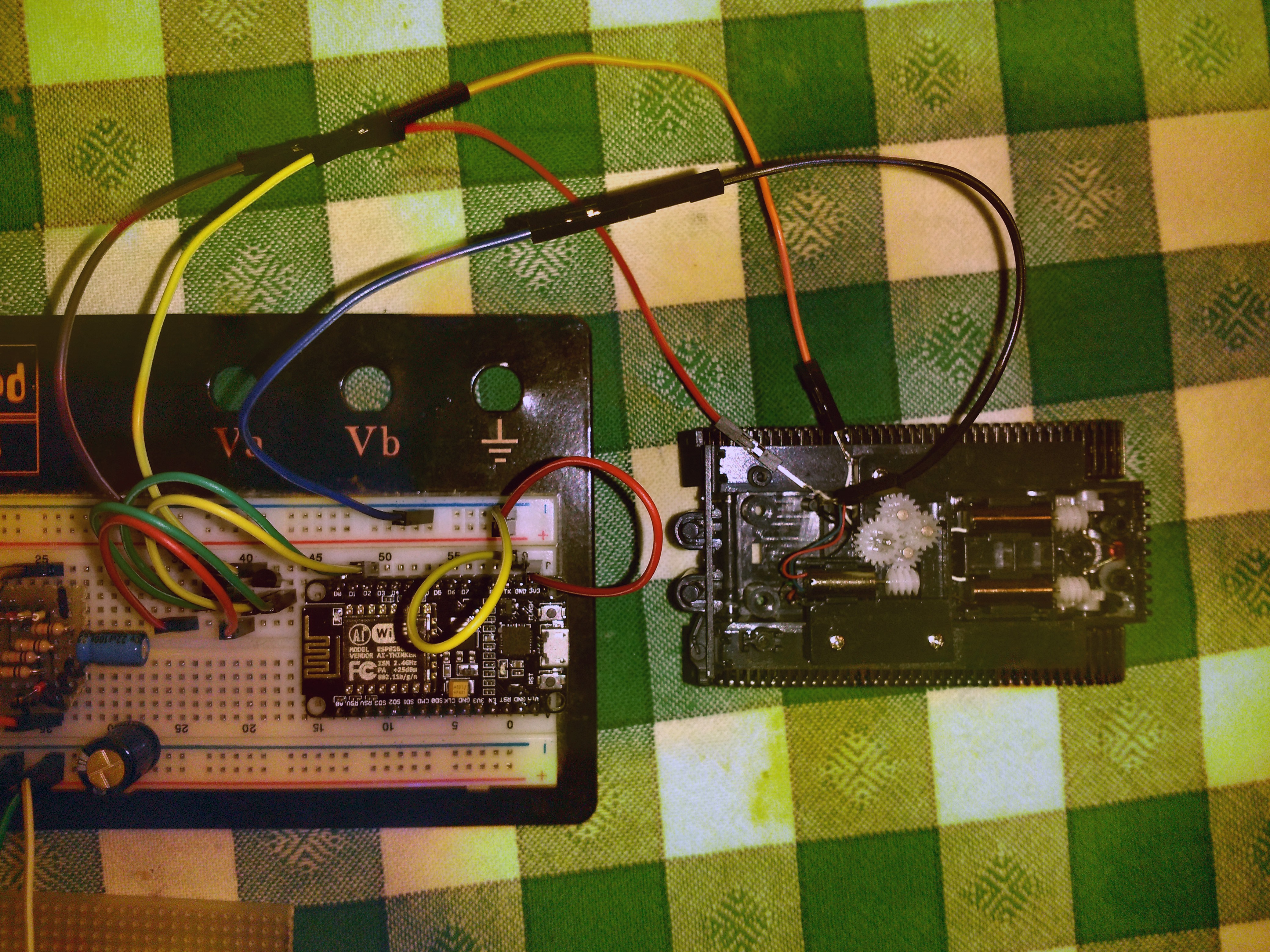
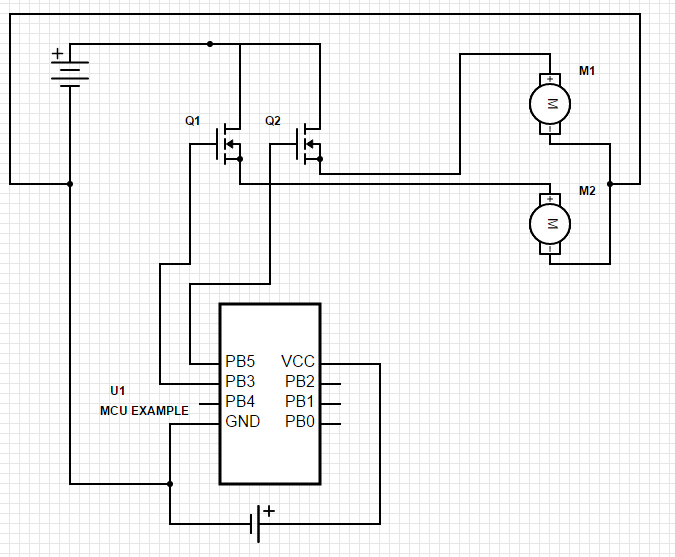
I am still waiting for some key components aka ESP-12 modules and H-Bridges to pack the creation, at the moment the functionality is demonstrated on breadboard having the tank engines controlled by 2 N-gate transistors, resulting on the missing reverse and the severe inability to move further away.
But do not fear! The code is kind of complete.
If I do have certain positive feedbacks on this, I could move on to a 1:16 tank replica, where i could really express the microprocessor potential by simulating a 30-ton machine inertia.
What could be possible if I include an IR blaster and IR receivers?


 Matthew Moore
Matthew Moore
 JP Gleyzes
JP Gleyzes
 Phil Malone
Phil Malone
 donutsorelse
donutsorelse
You might enjoy the "Sample Usage" link from my "RC Servo" project.